手把手教你用深度学习做物体检测(一): 快速感受物体检测的酷炫
我们先来看看什么是物体检测,见下图:
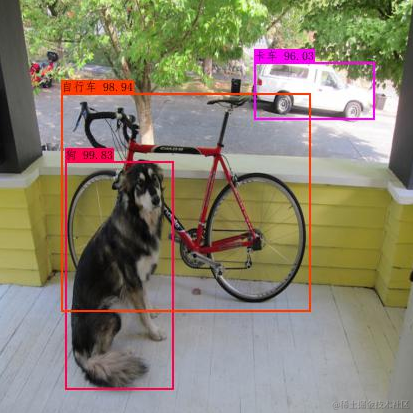
如上图所示,?物体检测就是需要检测出图像中有哪些目标物体,并且框出其在图像中的位置。
本篇文章,我将会介绍如何利用训练好的物体检测模型来快速实现上图的效果,这里我们将会用到基于coco数据集训练的yolov3模型,该模型能识别80类物品,具体如下:
人 自行车 汽车 摩托车 飞机 公共汽车 火车 卡车 船 红绿灯 消防栓 停车标志 停车收费码表 长凳 鸟 猫 狗 马 羊 牛 大象 熊 斑马 长颈鹿
双肩包 雨伞 手提包 领带 手提箱 飞盘 双架滑雪板 滑雪板 球 风筝 棒球棍 棒球手套 滑板 冲浪板 网球拍 瓶子 酒杯 杯子 叉子 刀 勺子 碗
香蕉 苹果 三明治 橙子 西兰花 胡萝卜 热狗 披萨 炸面圈 蛋糕 椅子 沙发 盆栽 床 餐桌 厕所 显示器 笔记本电脑 鼠标 遥控器 键盘 手机
微波炉 电烤箱 烤面包器 水槽 冰箱 书 钟 花瓶 剪刀 泰迪熊 吹风机 牙刷
下面,我们来看具体如何实现。
第一步:从github上下载项目:?https://github.com/qqwweee/keras-yolo3
该项目是基于keras的yolov3实现,keras是一个深度学习高层框架,提供了更友好的接口,其底层可以兼容很多深度学习框架,比如tensorflow等。yolo是目前很流行的物体检测算法,yolov3是第三个版本,也是最新的版本。
第二步:安装keras。
通过pip安装即可,如果后续有遇到本地环境没有的包,也通过pip安装就好了(这里假设你已经装好了python的相关环境,并且知道如何使用pip,如果你还不清楚,可以自行网上搜索,过程也不复杂)。
第三步:下载yolov3.weights,这个文件是darknet预训练好的yolov3模型,可以检测coco数据集中涵盖的80类物体。地址:https://pjreddie.com/media/files/yolov3.weights
第四步:执行以下命令,将下载下来的文件转换为keras可以使用的.h5模型文件
python convert.py yolov3.cfg yolov3.weights model_data/yolo.h5
第五步:将项目中的yolo.py,用下面代码替换,注意检查_defaults中的配置路径是否正确
# -*- coding: utf-8 -*-
"""
Class definition of YOLO_v3 style detection model on image and video
"""
import colorsys
import os
from timeit import default_timer as timer
import numpy as np
from PIL import Image, ImageFont, ImageDraw
from keras import backend as K
from keras.layers import Input
from keras.models import load_model
from keras.utils import multi_gpu_model
from yolo3.model import yolo_eval, yolo_body, tiny_yolo_body
from yolo3.utils import letterbox_image
class YOLO(object):
_defaults = {
"model_path": 'model_data/yolo_weights.h5',
"anchors_path": 'model_data/yolo_anchors.txt',
"classes_path": 'model_data/coco_classes.txt',
"score" : 0.3,
"iou" : 0.45,
"model_image_size" : (416, 416),
"gpu_num" : 0,
}
@classmethod
def get_defaults(cls, n):
if n in cls._defaults:
return cls._defaults[n]
else:
return "Unrecognized attribute name '" + n + "'"
def __init__(self, **kwargs):
self.__dict__.update(self._defaults) # set up default values
self.__dict__.update(kwargs) # and update with user overrides
self.class_names = self._get_class()
self.anchors = self._get_anchors()
self.sess = K.get_session()
self.boxes, self.scores, self.classes = self.generate()
def _get_class(self):
classes_path = os.path.expanduser(self.classes_path)
with open(classes_path, encoding="utf-8") as f:
class_names = f.readlines()
class_names = [c.strip() for c in class_names]
return class_names
def _get_anchors(self):
anchors_path = os.path.expanduser(self.anchors_path)
with open(anchors_path, encoding="utf-8") as f:
anchors = f.readline()
anchors = [float(x) for x in anchors.split(',')]
return np.array(anchors).reshape(-1, 2)
def generate(self):
model_path = os.path.expanduser(self.model_path)
assert model_path.endswith('.h5'), 'Keras model or weights must be a .h5 file.'
# Load model, or construct model and load weights.
num_anchors = len(self.anchors)
num_classes = len(self.class_names)
is_tiny_version = num_anchors == 6 # default setting
try:
self.yolo_model = load_model(model_path, compile=False)
except:
self.yolo_model = tiny_yolo_body(Input(shape=(None, None, 3)), num_anchors // 2, num_classes) \
if is_tiny_version else yolo_body(Input(shape=(None, None, 3)), num_anchors // 3, num_classes)
self.yolo_model.load_weights(self.model_path) # make sure model, anchors and classes match
else:
assert self.yolo_model.layers[-1].output_shape[-1] == \
num_anchors / len(self.yolo_model.output) * (num_classes + 5), \
'Mismatch between model and given anchor and class sizes'
print('{} model, anchors, and classes loaded.'.format(model_path))
# Generate colors for drawing bounding boxes.
hsv_tuples = [(x / len(self.class_names), 1., 1.)
for x in range(len(self.class_names))]
self.colors = list(map(lambda x: colorsys.hsv_to_rgb(*x), hsv_tuples))
self.colors = list(
map(lambda x: (int(x[0] * 255), int(x[1] * 255), int(x[2] * 255)),
self.colors))
np.random.seed(10101) # Fixed seed for consistent colors across runs.
np.random.shuffle(self.colors) # Shuffle colors to decorrelate adjacent classes.
np.random.seed(None) # Reset seed to default.
# Generate output tensor targets for filtered bounding boxes.
self.input_image_shape = K.placeholder(shape=(2,))
if self.gpu_num >= 2:
self.yolo_model = multi_gpu_model(self.yolo_model, gpus=self.gpu_num)
boxes, scores, classes = yolo_eval(self.yolo_model.output, self.anchors,
len(self.class_names), self.input_image_shape,
score_threshold=self.score, iou_threshold=self.iou)
return boxes, scores, classes
def detect_image(self, image):
start = timer()
if self.model_image_size != (None, None):
assert self.model_image_size[0] % 32 == 0, 'Multiples of 32 required'
assert self.model_image_size[1] % 32 == 0, 'Multiples of 32 required'
boxed_image = letterbox_image(image, tuple(reversed(self.model_image_size)))
else:
new_image_size = (image.width - (image.width % 32),
image.height - (image.height % 32))
boxed_image = letterbox_image(image, new_image_size)
image_data = np.array(boxed_image, dtype='float32')
print(image_data.shape)
image_data /= 255.
image_data = np.expand_dims(image_data, 0) # Add batch dimension.
out_boxes, out_scores, out_classes = self.sess.run(
[self.boxes, self.scores, self.classes],
feed_dict={
self.yolo_model.input: image_data,
self.input_image_shape: [image.size[1], image.size[0]],
K.learning_phase(): 0
})
print('Found {} boxes for {}'.format(len(out_boxes), 'img'))
# font = ImageFont.truetype(font='font/FiraMono-Medium.otf',
# size=np.floor(3e-2 * image.size[1] + 0.5).astype('int32'))
# 使用中文字体
font = ImageFont.truetype(font='font/simfang.ttf',
size=np.floor(3e-2 * image.size[1] + 0.5).astype('int32'))
thickness = (image.size[0] + image.size[1]) // 300
for i, c in reversed(list(enumerate(out_classes))):
predicted_class = self.class_names[c]
box = out_boxes[i]
score = out_scores[i]
label = '{} {:.2f}'.format(predicted_class, score)
draw = ImageDraw.Draw(image)
label_size = draw.textsize(label, font)
top, left, bottom, right = box
top = max(0, np.floor(top + 0.5).astype('int32'))
left = max(0, np.floor(left + 0.5).astype('int32'))
bottom = min(image.size[1], np.floor(bottom + 0.5).astype('int32'))
right = min(image.size[0], np.floor(right + 0.5).astype('int32'))
print(label, (left, top), (right, bottom))
if top - label_size[1] >= 0:
text_origin = np.array([left, top - label_size[1]])
else:
text_origin = np.array([left, top + 1])
# My kingdom for a good redistributable image drawing library.
for i in range(thickness):
draw.rectangle(
[left + i, top + i, right - i, bottom - i],
outline=self.colors[c])
draw.rectangle(
[tuple(text_origin), tuple(text_origin + label_size)],
fill=self.colors[c])
draw.text(text_origin, label, fill=(0, 0, 0), font=font)
del draw
end = timer()
print(end - start)
return image
def close_session(self):
self.sess.close()
def detect_video(yolo, video_path, output_path=""):
import cv2
vid = cv2.VideoCapture(video_path)
if not vid.isOpened():
raise IOError("Couldn't open webcam or video")
# video_FourCC = int(vid.get(cv2.CAP_PROP_FOURCC))
video_FourCC = cv2.VideoWriter_fourcc(*"mp4v")
video_fps = vid.get(cv2.CAP_PROP_FPS)
video_size = (int(vid.get(cv2.CAP_PROP_FRAME_WIDTH)),
int(vid.get(cv2.CAP_PROP_FRAME_HEIGHT)))
isOutput = True if output_path != "" else False
if isOutput:
print("!!! TYPE:", type(output_path), type(video_FourCC), type(video_fps), type(video_size))
out = cv2.VideoWriter(output_path, video_FourCC, video_fps, video_size)
accum_time = 0
curr_fps = 0
fps = "FPS: ??"
prev_time = timer()
while True:
return_value, frame = vid.read()
if return_value:
image = Image.fromarray(frame)
image = yolo.detect_image(image)
result = np.asarray(image)
curr_time = timer()
exec_time = curr_time - prev_time
prev_time = curr_time
accum_time = accum_time + exec_time
curr_fps = curr_fps + 1
if accum_time > 1:
accum_time = accum_time - 1
fps = "FPS: " + str(curr_fps)
curr_fps = 0
cv2.putText(result, text=fps, org=(3, 15), fontFace=cv2.FONT_HERSHEY_SIMPLEX,
fontScale=0.50, color=(255, 0, 0), thickness=2)
cv2.namedWindow("Object Detect", cv2.WINDOW_NORMAL)
cv2.resizeWindow("Object Detect", 640, 480);
cv2.imshow("Object Detect", result)
if isOutput:
print("start write...==========================================================================")
out.write(result)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
else:
break
out.release()
vid.release()
cv2.destroyAllWindows()
yolo.close_session()
def for_img(yolo):
path = 'images/IMG_0728.JPG'
try:
image = Image.open(path)
except:
print('Open Error! Try again!')
else:
r_image = yolo.detect_image(image)
r_image.show()
yolo.close_session()
def for_video(yolo):
detect_video(yolo, "videos/xx.mp4", "videos/xx_detect.mp4")
if __name__ == '__main__':
_yolo = YOLO()
for_img(_yolo)
# for_video(_yolo)
本项目是可以在CPU上运行的,但是GPU上运行的更快。关于如何搭建GPU的运行环境,感兴趣的读者可以参考《如何在阿里云租一台GPU服务器做深度学习?》,然后将上面的代码的gpu_num改为你的GPU号(可以使用nvidia-smi命令查看),并注意加入对GPU显存的使用控制即可,这里为了快速体验物体检测效果,就不再对GPU下运行程序做过多的介绍,虽然在CPU下运行会慢很多,但用于体验足够了。
做完上面的步骤后,执行yolo.py,将会看到你想检测的图像的物体检测效果,左边是原图,该图项目中是没有的,可以自行下载,或者用你喜欢的其它图片来尝试检测:

除了图片的检测,还可以对视频进行检测,修改yolo.py中的最后一行,将图片检测注释掉,放开视频检测的注释,然后执行yolo.py即可,下面是检测效果:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!