Science Robotics发表仿生鼠机器人的最新研究成果
该研究开发了一款高度仿生的老鼠机器人,这款机器人的核心创新在于引入了可变形的柔性脊柱,大幅提升了机器人的运动灵活性和效率。这一重大突破不仅推动了具有脊柱的足式机器人设计领域的发展,同时也为运动控制的相关研究提供了全新的视角和可能性。文章的通讯作者之一是中山大学计算机学院黄凯教授,合作者包括德国慕尼黑工业大学在读博士、中山大学计算机学院17届毕业生黄裕泓。
这项研究揭示了灵活脊柱在提升足式机器人运动能力,特别是在提高敏捷性方面起着至关重要的作用。目前,尽管四足机器人依赖于腿部已实现高度的动态和灵活移动,但它们的运动方式仍显示出某种程度的僵硬,这在一定程度上限制了它们的运动效率。因此,将灵活的脊柱设计融入机器人的构造,对于增强其敏捷性,尤其是对体积受限、动力不足的小型和欠驱动四足机器人而言,显得尤为有益。在本项研究中,研究人员设计并展示了一种符合神经机器人标准的老鼠机器人(Neurorobotic Mouse, NeRmo)。该机器人拥有能够侧向弯曲的柔韧脊柱,显著提升了其行走速度和机动性。作为一种仿生机器老鼠,NeRmo模拟了真实老鼠的形态和肌腱驱动系统。首先,NeRmo通过柔韧脊柱的侧向弯曲,在最初不稳定的配置中通过调整姿势来显著增强其静态稳定性。其次,这种脊柱的侧向弯曲还能有效地延伸步态的步幅,进而提高行走速度。最后,NeRmo借助其灵活的脊柱在需要小转弯半径和快速行进时表现出优异的敏捷机动性。这些发现不仅加深了我们对基于脊柱的四足动物运动技能的理解,也突显了更加敏捷的四足机器人前瞻设计理念。
在这项研究中,研究团队详细阐述了脊柱水平弯曲对动物运动能力的多重影响。
· 对静态稳定性的影响:脊柱的弯曲导致动物重心位置发生变化,这对于保持平衡至关重要。
· 对步幅长度的影响:通过改变肩膀与臀部之间的距离,脊柱的弯曲有助于调整步幅长度。
· 对转弯能力的影响:脊柱的弯曲还会改变臀部和肩部的轴线,从而影响转弯效率。
研究团队巧妙地将这些理论应用于机器人设计中,显著提升了机器人的静态平衡能力、运动速度以及转弯能力。

在进行静态平衡的实验中,研究团队展现了基于脊柱平衡补偿机制(Spine balance compensation, SBC)的独特作用。这一机制通过侧向脊柱的弯曲来调整重心(Center of Mass, CoM),保证了机器人在最初不稳定的状态下仍能保持静态稳定。实验过程如下:首先,NeRmo机器人被设置在一个中性的四足静态接触状态,其腿部直接位于肩部或臀部的正下方。接着,机器人的每条腿依次被抬起,转换至三足静态接触状态。在此状态下,抬起的腿在肩部或臀部关节的全运动范围内摆动,并同时测试启用和未启用SBC的效果。结果显示,在未启用SBC的情况下,由于重心超出了支撑基底,机器人无法维持三足站立的平衡。然而,当启用SBC后,NeRmo能够有效保持平衡。为了进一步量化分析,研究人员监测了NeRmo在真实环境中的俯仰和滚转角度。即使在能够维持平衡的情况下,启用SBC的NeRmo在抬起前腿时的前倾角度减少了50%,滚转角减少了50%。在进行后腿平衡测试时,SBC使俯仰偏差减少了73%,滚转偏差减少了80%,有效避免了机器人的倾覆。
在脊柱SBC的作用下,机器人可以保持三足站立的稳定性
实验二:柔性脊柱弯曲提升机器人运动速度
在直线行走的研究中,最新实验成果揭示了利用脊柱侧向弯曲以提升行走速度的方法。研究显示,脊柱辅助的步态在速度上超过了传统步态。论文中详细展示了在不同步态频率下的行走速度,这些数据是在真实环境中获得的。实验测试了六种不同的步态配置,涵盖了带脊柱和不带脊柱的理想小跑(分别标记为“trt,s”和“trt,ns”)、带脊柱和不带脊柱的步行小跑(分别标记为“walk,s”和“walk,ns”)以及带脊柱和不带脊柱的侧向行走步态(分别标记为“lat,s”和“lat,ns”)。研究表明,在不同频率不同步态的大量实验中,机器人的速度增幅从8%到17%不等。研究团队观察到,脊柱辅助的步态比常规步态具有更大的步幅。与标准步态的直线轨迹相比,脊柱辅助步态中摆动腿的轨迹展现出独特的曲线形态,这主要是由于脊柱的弯曲所引起的。这些在真实世界中的结果不仅验证了模拟测试的结果,也显示了相同的趋势。
在脊柱作用下,机器人在多种步态测试中均有效提升了运动速度
实验三:柔性脊柱弯曲提升机器人转弯能力
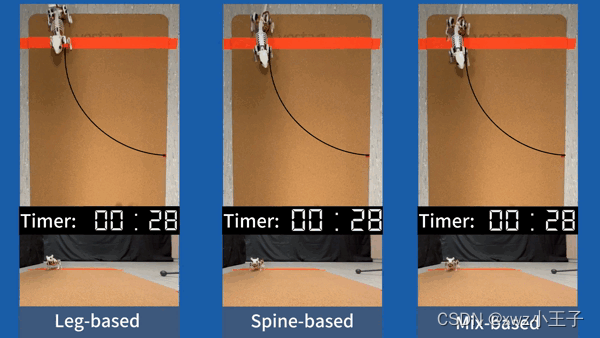
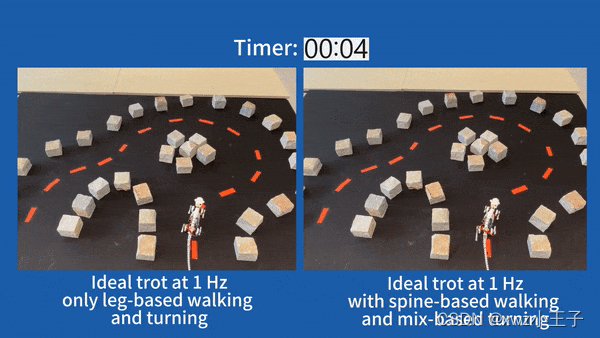
在这项研究中,团队展现了脊柱引入所增强的转弯能力。实验考察了三种转弯策略:基于腿部的转弯、基于脊柱的转弯以及混合式转弯。在基于腿部的转弯策略中,机器人通过调整每侧步幅的长度来控制运动,产生非对称的接触力分布,在重心周围生成偏航力矩。与之相对的,基于脊柱的转弯策略则利用脊柱的侧向弯曲来引导机器人,这种方法与某些生物的自然行为类似。而混合式转弯策略则融合了基于腿部和基于脊柱的两种方法。实验结果表明,在所有测试的步态频率和类型中,基于脊柱的侧向弯曲转弯无论在哪种转弯轨迹下都显示出最快的速度,比基于腿部的转弯快约20%到30%。混合式转弯策略的速度也优于纯腿部驱动的转弯,仅略逊于纯脊柱驱动的转弯。在实际应用中,混合式转弯策略实现了最佳的最小转弯半径,比基于腿部的转弯小约30%,并且比纯脊柱驱动的转弯小60%到85%。这些发现不仅凸显了脊柱弯曲在机器人运动中的重要性,也为未来机器人设计提供了有价值的参考。
在脊柱和腿部共同作用下的转弯行为兼具转弯速度和灵活性
实验四:柔性脊柱弯曲提升机器人的整体运动能力
在最后一个实验中,研究团队在迷宫环境中进行了导航任务测试。机器人在开启和关闭脊柱控制器两种配置下进行测试。如图所示,迷宫场景要求机器人执行一系列的行走和转弯动作以穿越迷宫。为了确定NeRmo应该遵循的路径,研究人员采用了视觉传感器来获取视觉数据。实验结果表明,受益于脊柱对足式运动的提升作用,机器人完成迷宫的时间减少了30.6%。
在脊柱作用下,老鼠机器人可以更快地完成复杂的迷宫任务
结论
在这项创新研究中,科研团队精心打造了仿生机器老鼠NeRmo,巧妙地模拟了老鼠四足行走时肌肉和骨骼的高效运作。其核心亮点在于一种既柔软又具有弹性的脊柱,这不仅能承担体重,还可以灵活伸展和弯曲,真实地再现了生物脊柱的功能。区别于常见的四足机器人,NeRmo拥有的脊柱设计既简洁又灵活,更显紧凑,为未来机器人脊柱设计提供了新的视角。在一系列实验中,研究人员展示了这种柔韧脊柱在提升小型欠驱动四足机器人运动性能上的显著优势,尤其是在提高静态稳定性、行走速度和转弯灵活性方面。特别值得一提的是,即使在三足接触的不稳定状态下,NeRmo也能保持平衡,充分证明了其在实际应用中的强大鲁棒性。此外,NeRmo利用其脊柱的侧向弯曲来延伸步幅,从而实现了更快的移动速度。在转弯性能方面,NeRmo相较于传统的基于腿部动作的转弯,其速度提高了高达40%,最小转弯半径也得到显著改进,展示了柔韧脊柱在提升四足机器人机动性方面的巨大潜力。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 如何成功面试出海企业的Mendix SA
- 解决 ‘phar.readonly‘ 设置为 ‘On‘ 的问题,轻松构建可写的 phar 文件
- LINUX基础培训八之管道符与重定向
- dell服务器 R740xd安装windows server 2019过程记录
- javaEE -19(9000 字 JavaScript入门 - 4)
- 力扣 | 437. 路径总和 III
- 【OCR】 - Tesseract OCR在mac系统中安装
- Android10.0 锁屏分析-KeyguardPatternView图案锁分析
- 【计算机网络】HTTP协议以及简单的HTTP服务器实现
- 第六站:C++面向对象