TP-GMM
Task-parameterized Gaussian mixture model (TP-GMM)
对于一组示教数据
ξ
∈
R
D
×
N
\bm{ξ} ∈R^{D×N}
ξ∈RD×N,从不同的坐标系去观测它
X
t
(
j
)
=
A
t
,
j
?
1
(
ξ
t
?
b
t
,
j
)
X^{(j)}_t=\bm{A}^{-1}_{t,j}(\bm{ξ}_t-\bm{b}_{t,j})
Xt(j)?=At,j?1?(ξt??bt,j?)
上标
j
j
j 代表坐标系,下标
t
t
t 代表 示教轨迹数据
(
d
a
t
a
p
o
i
n
t
s
)
(datapoints)
(datapoints)的索引,
A
A
A 和
b
b
b 代表坐标系
j
j
j的姿态描述和位置描述
TP-GMM 形式为有
K
K
K个
c
o
m
p
o
n
e
n
t
component
component 其形式为
{
π
i
,
{
μ
i
j
,
Σ
i
(
j
)
}
j
=
1
P
}
i
=
1
K
\{{\pi_i,\{μ_i^{j},Σ^{(j)}_i}\}^P_{j=1}\}^K_{i=1}
{πi?,{μij?,Σi(j)?}j=1P?}i=1K?
可以看出均值
μ
{μ}
μ 和
Σ
Σ
Σ 方差 的维度为
K
×
P
K×P
K×P
直接拿不同坐标系数据去训练, 扩张维度, 是不是太生猛一点了
训练完后需要去掉坐标系维度,得到最终的 TP-GMM。论文的做法是,对于每个
c
o
m
p
o
n
e
n
t
component
component 存在
P
P
P 个分布,将这
P
P
P 个高斯分布相乘,最终得到的结果是:
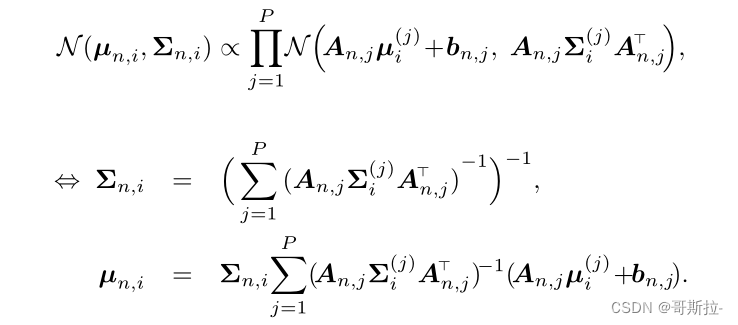
得到最终
T
P
?
G
M
M
TP-GMM
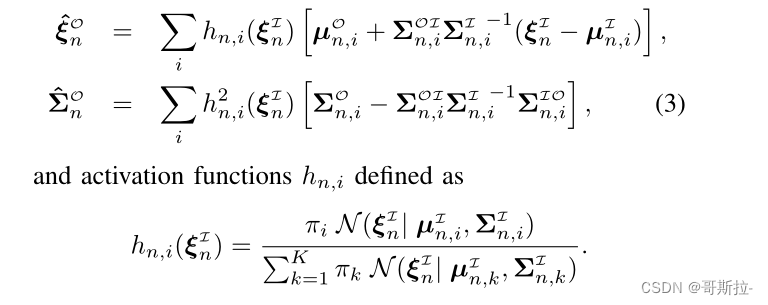
TP?GMM 后进行高斯混合回归,对于任务空间中的轨迹数据,上标 I 对应于时间输入维度,O 对应于描述任务空间中路径(位置和方向)的输出维度。n 代表迭代次数,
ξ
n
I
ξ_n^I
ξnI? 和
ξ
n
o
ξ_n^o
ξno? 代表输入和输出。训练出的TP-GMM模型是输入输出的联合分布,将 TP-GMM 的均值和方差拆成输入输出两部分
GMR依赖该联合分布
P
(
ξ
n
I
,
ξ
n
o
)
P(ξ_n^I, ξ_n^o )
P(ξnI?,ξno?) 估计条件概率
P
(
ξ
n
I
∣
ξ
n
o
)
P(ξ_n^I | ξ_n^o )
P(ξnI?∣ξno?) ,最终的分布为
N
(
ξ
^
n
O
,
Σ
^
n
O
)
N (\hat ξ^O_n, \hatΣ^O_n)
N(ξ^?nO?,Σ^nO?)
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 2024年到了!质量工程师如何在这个人工智能的时代中生存?
- 专家观点∣数字化场景应用助力铁合金企业增产提效
- C指针详解
- 关于使用jdk8自带的日期类getDayOfWeek()的详细解释
- 代码随想录刷题第三十五天| 860.柠檬水找零 ● 406.根据身高重建队列 ● 452. 用最少数量的箭引爆气球|
- alzet植入式胶囊渗透压泵操作流程
- DNS是什么?为什么需要DNS?常用的DNS记录类型有哪些?
- 数据结构:顺序循环队列
- C# 介绍、应用领域、入门、语法、输出和注释详解
- Linux C语言 50-套接字参数设置