robot_sim配置
robot_sim
https://github.com/Suyixiu/robot_sim 的issue
https://www.bilibili.com/video/BV19f4y1h73E/ 下评论
文件来源
其余克隆
基于几何的抓取
banana不显示
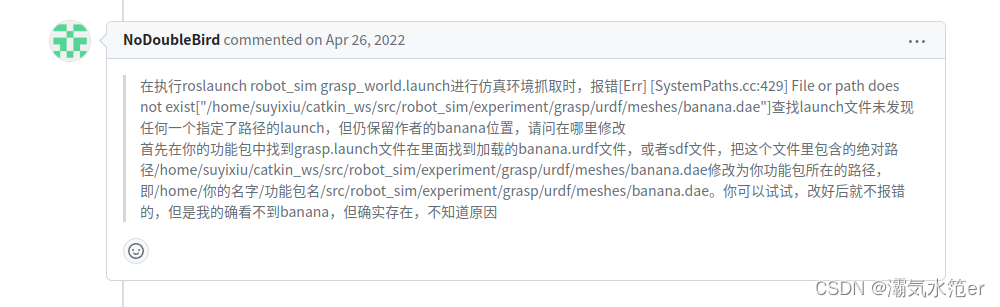
解决参考
https://github.com/Suyixiu/robot_sim/issues/2 (项目配置主要参考)
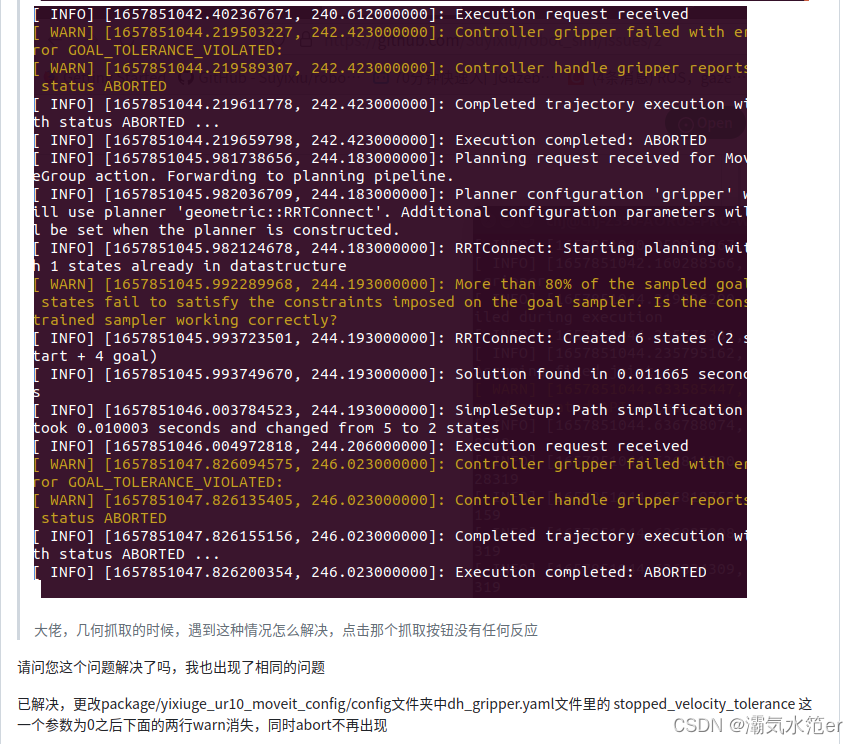
abort问题解决同样参考该网址
如果还无再试https://blog.csdn.net/qq_44642372/article/details/123935071
来自上github网址
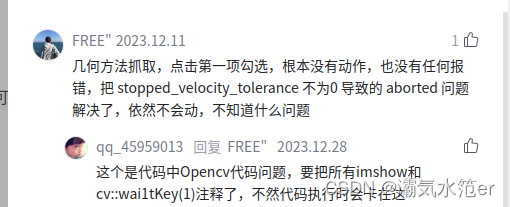
双击第一个单选框无反应
解决参考https://blog.csdn.net/qq_38620941/article/details/125321347
(里面所有链接所涉及的安装配置基本都试了)
下评论
几何抓取需要改得应该只有main和recongnize
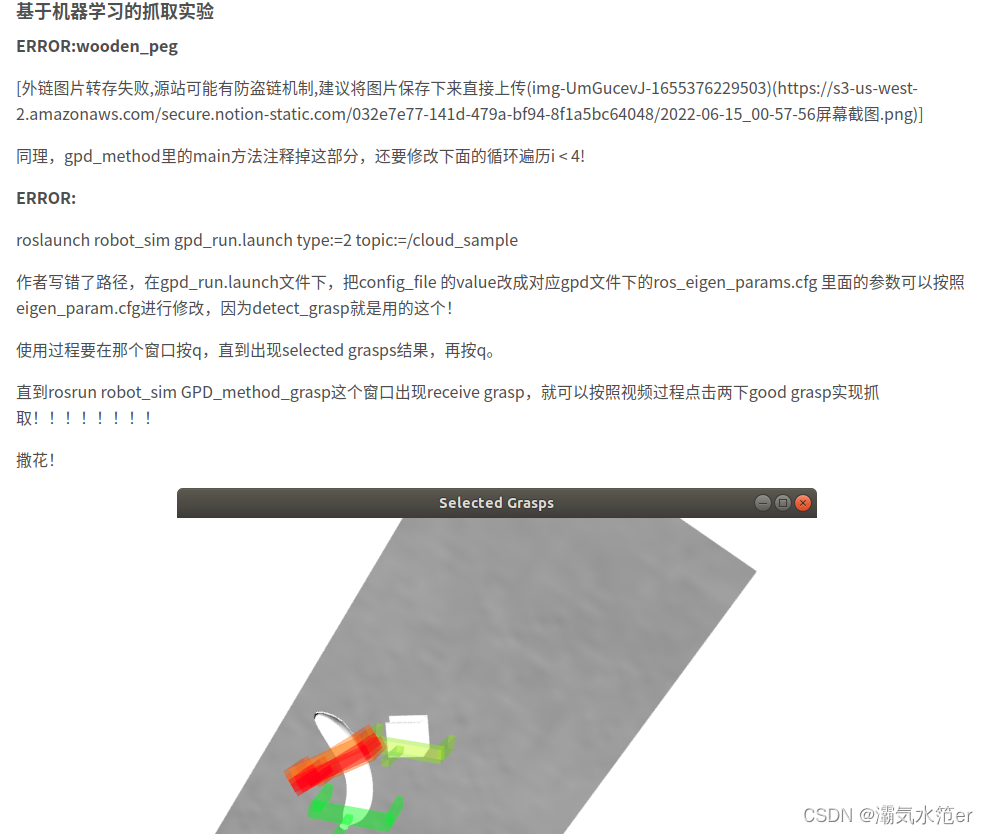
基于几何学习的抓取实验
roslaunch robot_sim grasp_world.launch
rosrun robot_sim geometric_method_grasp
对wooden_peg ERROR
https://blog.csdn.net/qq_38620941/article/details/125321347
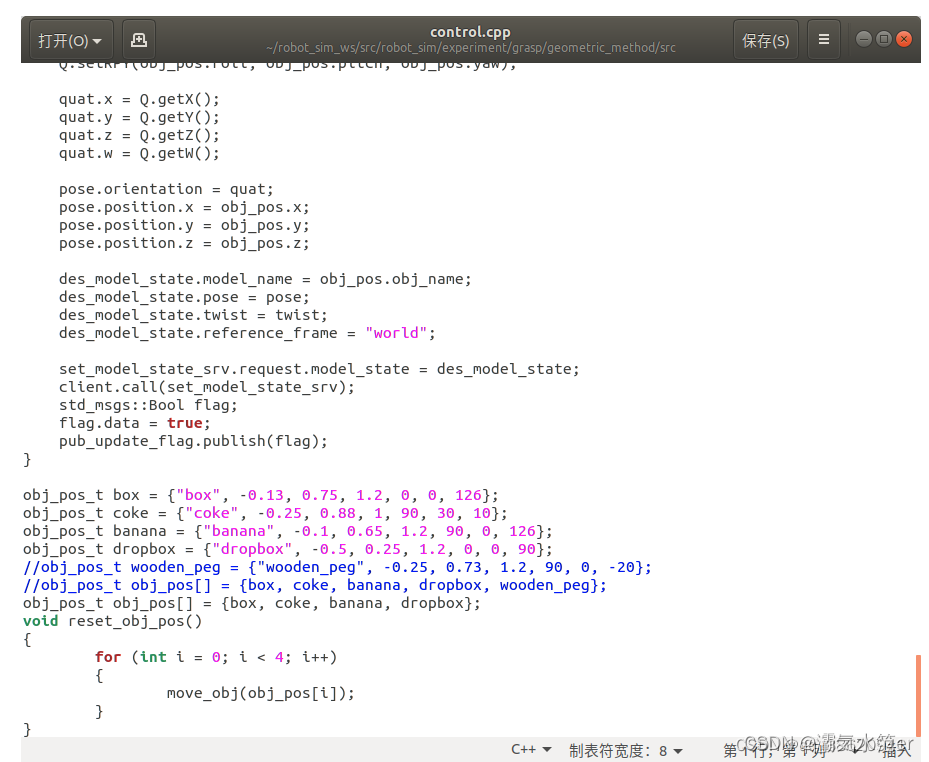
不要忘了把循环下次数改为4
catkin_make 生效!
点击两下第一个按钮自动执行,成功!
现有问题geometry_grasp图相加载不出来
c++标定已做,python未
深度图配准失败
基于深度学习的抓取
关于编译
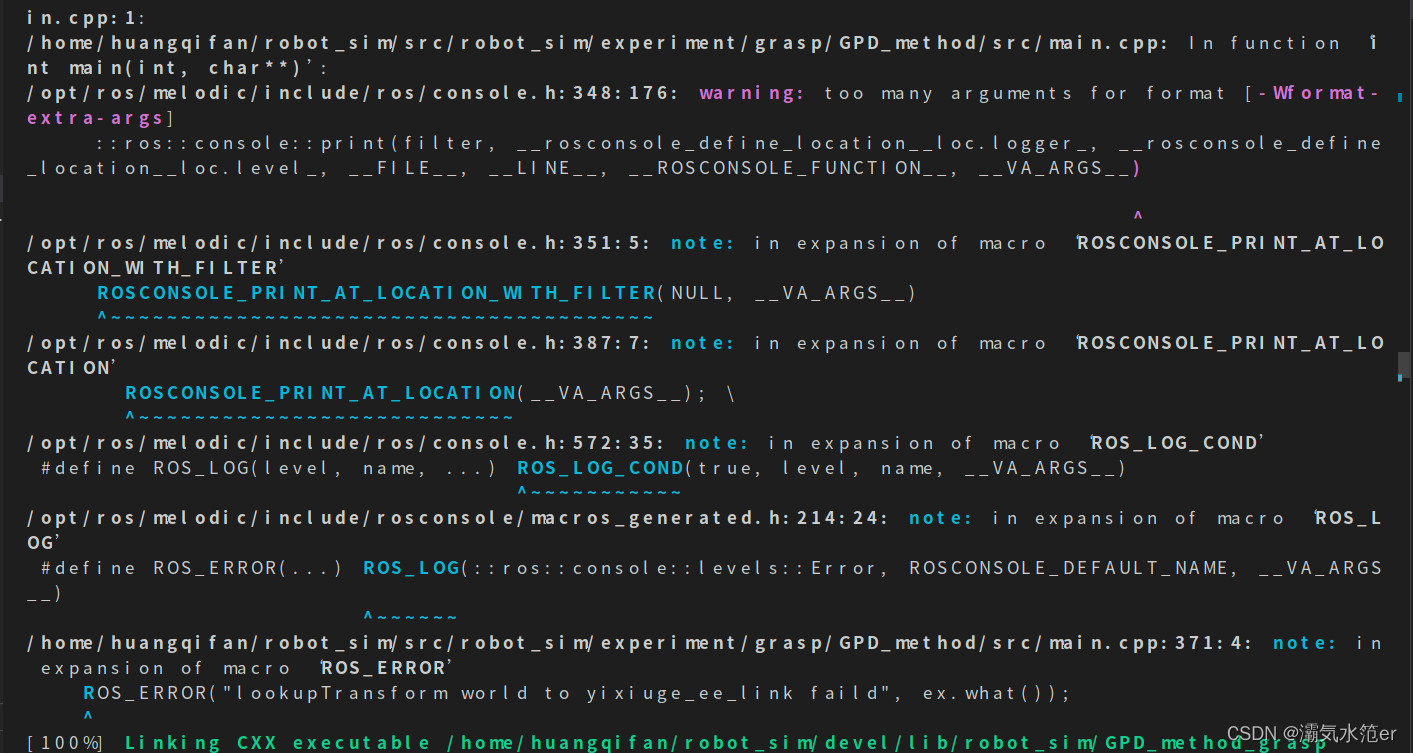
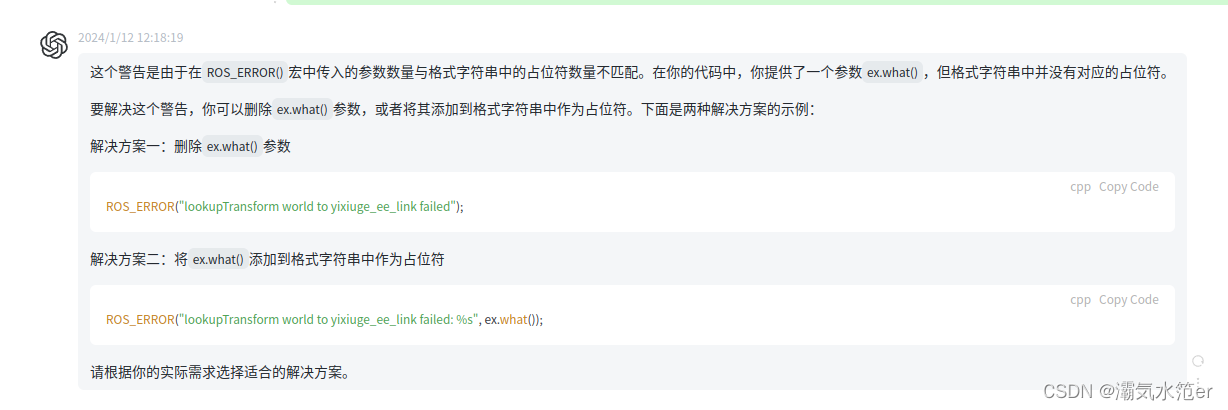
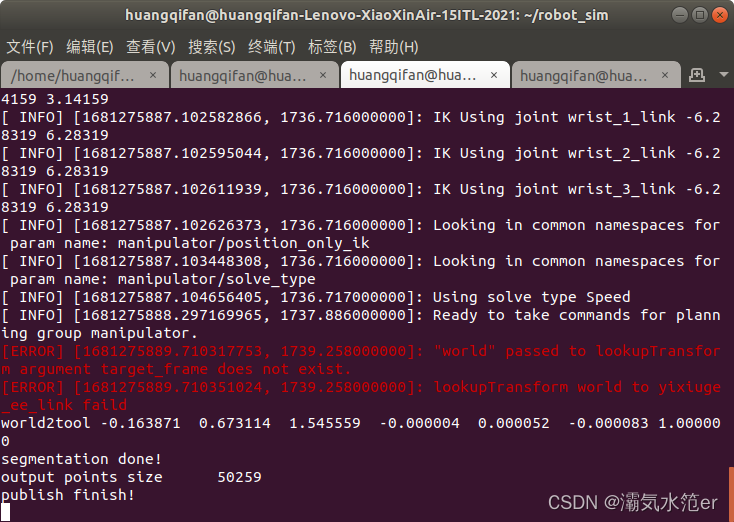
问题,将ROS_ERROR(“lookupTransform world to yixiuge_ee_link faild”, ex.what()
改为ROS_ERROR(“lookupTransform world to yixiuge_ee_link failed: %s”, ex.what());
参考gpt
优化代码部分为(可能没什么用)
tf::TransformListener listener;
tf::StampedTransform world2tool;
ros::Duration timeout(1.0); // 设置等待超时时间
try {
listener.waitForTransform("/world", "/yixiuge_ee_link", ros::Time(0), timeout);
listener.lookupTransform("/world", "/yixiuge_ee_link", ros::Time(0), world2tool);
printf("world2tool %f %f %f %f %f %f %f\n",
world2tool.getOrigin().x(), world2tool.getOrigin().y(), world2tool.getOrigin().z(),
world2tool.getRotation().getX(), world2tool.getRotation().getY(), world2tool.getRotation().getZ(), world2tool.getRotation().getW());
} catch (tf::TransformException &ex) {
ROS_ERROR("%s", ex.what());
ROS_ERROR("lookupTransform world to yixiuge_ee_link failed", ex.what());
}
roslaunch robot_sim grasp_world.launch
roslaunch robot_sim gpd_run.launch type:=2 topic:=/cloud_sample
rosrun robot_sim GPD_method_grasp
没有进conda环境,开了梯子,用vscode终端运行的
参考https://blog.csdn.net/qq_38620941/article/details/125321347
更改gpd_run.launch 中的config_file为ros_eigen_params.cfg ,不改会出现world问题
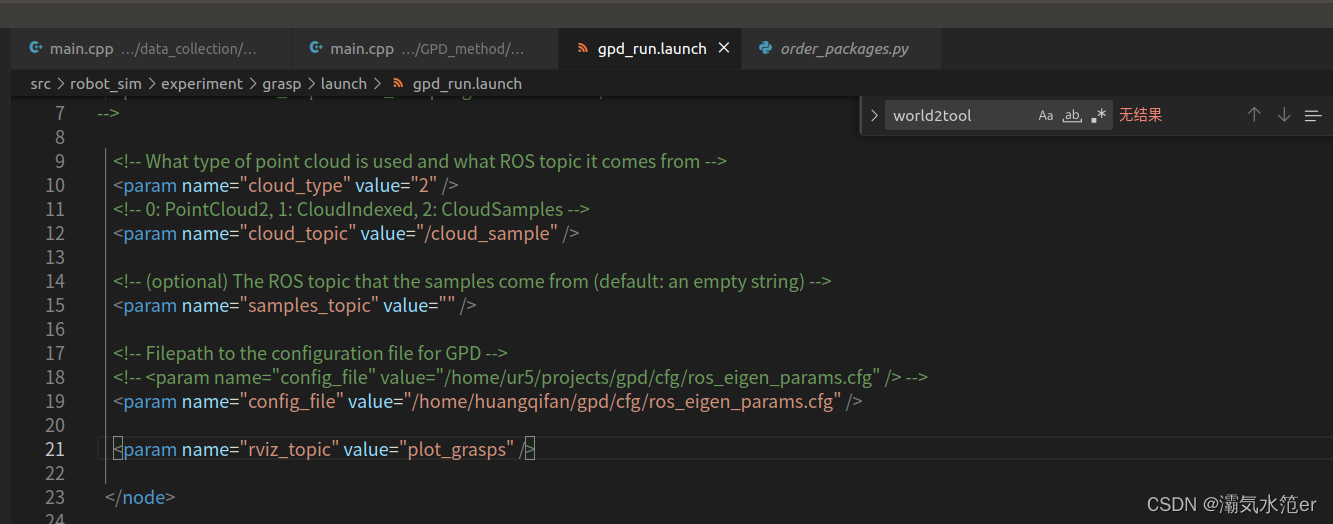
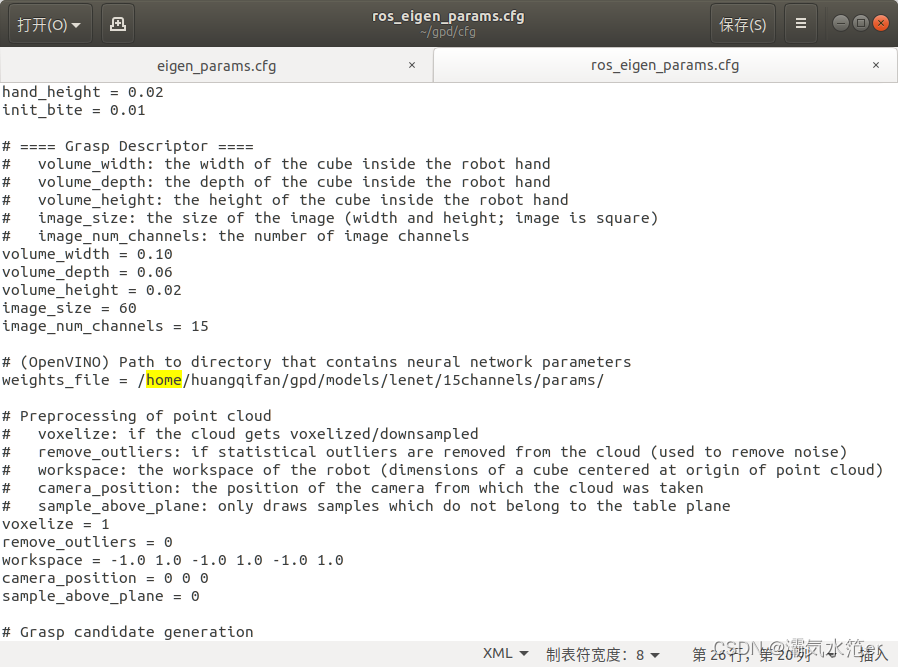
更改里面的参数按照eigen_param.cfg ,每一个相同的参数,
更改ros_eigen_params.cfg中的weights_file路径为你的gpd中的
参考https://github.com/atenpas/gpd_ros/issues/12
在新弹出的Normal框中按q,再新弹出的grasp candidates中按q,在selected grasps中按q,看到rosrun robot_sim GPD_method_grasp这个窗口出现receive grasp,就可以按照视频过程点击两下good grasp实现抓取!!!!!!!!
依然会出现
有时候可能是路径规划有问题,有动作但没有抓取成功
验证你的gpd是否安装成功,
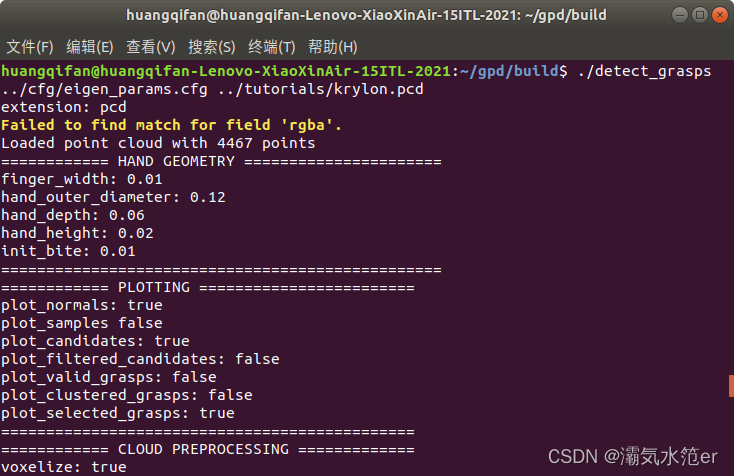
在新弹出的Normal框中按q,再新弹出的grasp candidates中按q,在selected grasps中按q,结束,不报错。
相关链接,及一些可能没有用的步骤
https://blog.csdn.net/qq_44876051/article/details/112370423
https://blog.csdn.net/qq_33328642/article/details/122267004
sudo -H pip3 install -U transforms3d(参考https://blog.csdn.net/qq_38620941/article/details/125321347下评论)

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- MatGPT - 访问 OpenAI? ChatGPT API 的 MATLAB? 应用程序
- 基于SSM实现的小区物业管理系统
- 文件二维码能下载文件吗?扫码看文件效率更高
- 离职的赔偿算法n 、n+1、2n你还不懂嘛?
- 深入学习Laravel缓存知识点(原理、策略及实例)
- Android Studio如何查找和替换
- String 类的常用方法都有那些?
- 100天精通Python(实用脚本篇)——第113天:基于Tesseract-OCR实现OCR图片文字识别实战
- DDL关于数据库和表操作的语法
- Ikuai中如何添加/更换虚拟机(图文)