路径规划中常用的抽稀(simplification)算法
发布时间:2024年01月18日
简介
? ? ? ?在路径规划中,过度密集的路径点不仅会增加计算和存储的负担,还可能导致路径冗余和效率下降,因此需要进行抽稀处理,同时保留路径的形状特征和轨迹信息,确保路径规划的精度和实时性。常见的抽稀算法有Ramer-Douglas-Peucker(RDP)算法和垂距限值法。
一、RDP算法
?基本原理:
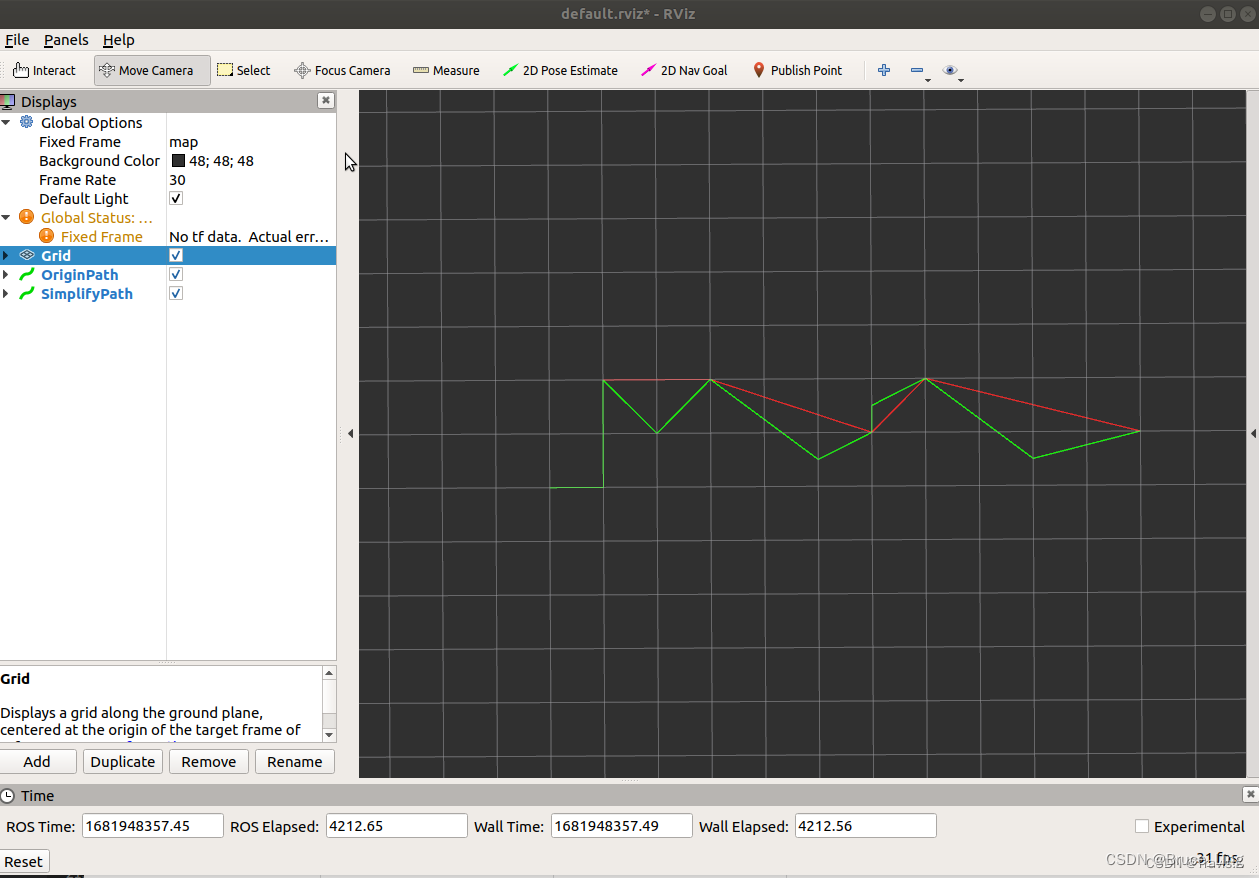
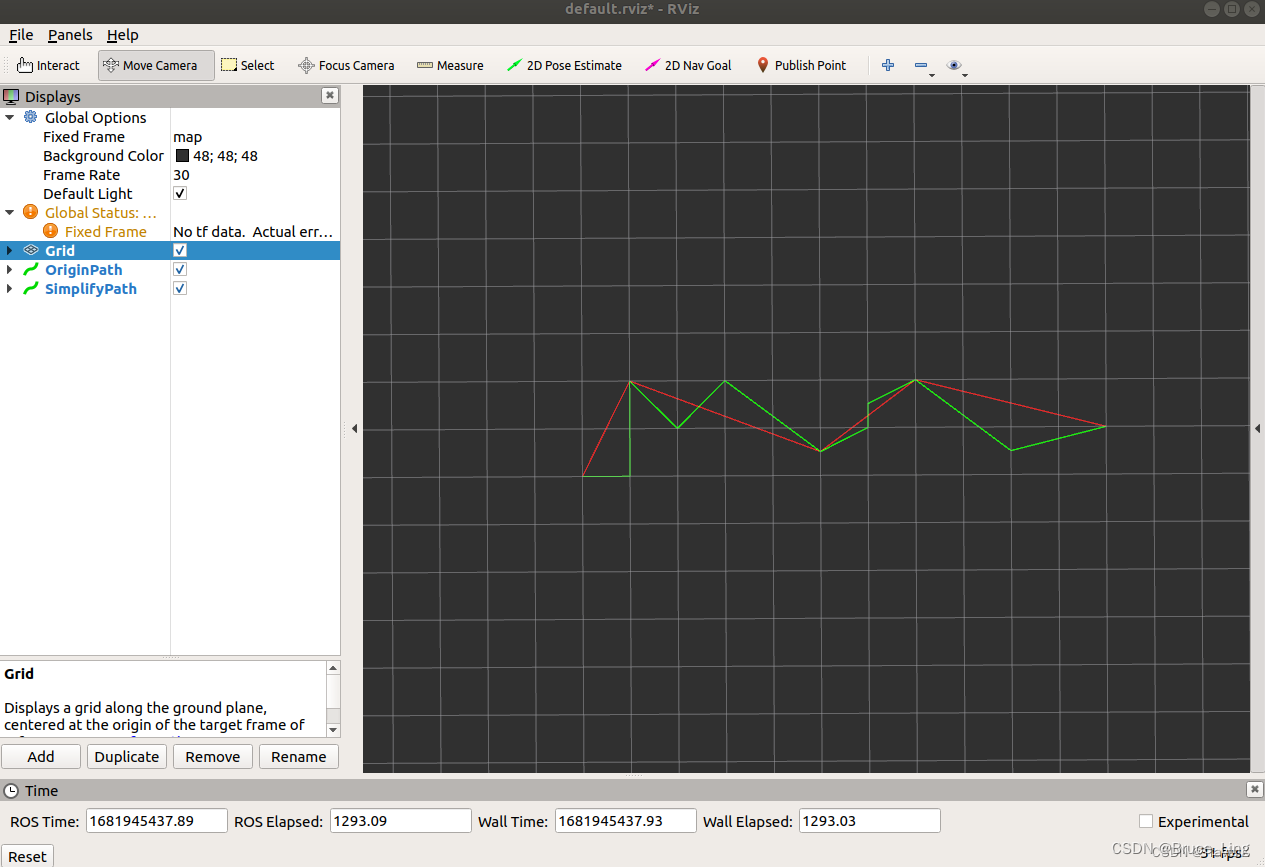
? ? ? ?RDP算法基于几何距离,选定路径的起点和终点,然后寻找路径中离这条直线距离最大的点,如果这个最大距离大于一个预定的阈值,则将这个点加入到新的路径中,同时将原路径分为两部分,递归进行此操作;如果最大距离小于阈值,则所有的中间点都可以删除。
算法步骤:?
1、已知给定的一条由n个点构成的路径。(两点之间可以是直线也可以是曲线)
2、在起点和终点之间找出垂距(点和直线的垂直距离)最大的点,如果垂距大于阈值,将路径以此点为分界点分为2部分;如果垂距小于阈值,剔除所有中间点。
3、递归步骤2.
?二、垂距限值法
?基本原理:
? ? ? ? 垂距限值法其实可以看做是一种简化版本的Ramer-Douglas-Peucker算法(RDP算法),它主要用于路径或者轨迹的抽稀,即剔除冗余点,以简化数据结构,降低计算哈比森和存储的负担。
?算法步骤:
1、已知给定的一条由n个点构成的路径。(两点之间可以是直线也可以是曲线)
2、除了起点和终点之外,计算所有点到起点和终点连成直线的垂距,如果垂距大于阈值,保留,反之,剔除。
?还有一种算法是,基于每个点与上一个点和下一个点形成的直线的垂距进行抽稀。
文章来源:https://blog.csdn.net/weixin_50273713/article/details/135650423
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- JFrog_Artifactory CLI 的使用
- 外包干了2个月,技术退步明显.......
- 单元测试,集成测试,系统测试的区别是什么?
- 2024年【起重机司机(限门式起重机)】考试题库及起重机司机(限门式起重机)模拟考试题
- 【JS逆向】【15.编码算法】对称加密(AES与DES),非对称加密(RSA)(详细笔记)
- 设计模式——1_5 享元(Flyweight)
- 隐藏服务器IP的正确使用方式
- 什么是跨链桥?
- 爬虫工作量由小到大的思维转变---<第二十三章 Scrapy开始很快,越来越慢(医病篇)>
- 深入理解Word Embeddings:Word2Vec技术与应用