ros_ign_bridge:ros2与gazebo fortress的桥梁
如果你启动的gazebo是这样的图标:

那么你实际使用的是fortress版本,我一开始就安装了harmonic版本,但是实际启动的确是这个图标,所以实际使用的是fortress版本,这是因为ros2默认带这个fortress版本。这个时候你使用ros_gz_bridge发送命令,gazebo就会什么反应都没有,虽然你通过ros2 命令确实看到在发送这个消息,但是机器人任然一动不动,这个时候你需要安装ros_ign_bridge
ROS 2 Integration
In this tutorial we will learn how to Integrate ROS 2 with Ignition. We will establish communication between them. This can help in many aspects; we can receive data or commands from ROS and apply it to Ignition and vice versa.
ros_ign_bridge
ros_ign_bridge?provides a network bridge which enables the exchange of messages between ROS 2 and Ignition Transport. Its support is limited to only certain message types. Please, check this?README?to verify if your message type is supported by the bridge.
Requirements
Please follow the?Install Gazebo and ROS document?before starting this tutorial. A working installation of ROS 2 and Gazebo is required to go further.
Bidirectional communication
We can initialize a bidirectional bridge so we can have ROS as the publisher and Ignition as the subscriber or vice versa.
For example:
ros2 run ros_ign_bridge parameter_bridge /TOPIC@ROS_MSG@IGN_MSGThe?ros2 run ros_ign_bridge parameter_bridge?command simply runs the?parameter_bridge?code from the?ros_ign_bridge?package. Then, we specify our topic?/TOPIC?over which the messages will be sent. The first?@?symbol delimits the topic name from the message types. Following the first?@?symbol is the ROS message type.
The ROS message type is followed by an?@,?[, or?]?symbol where:
@?is a bidirectional bridge.[?is a bridge from Ignition to ROS.]?is a bridge from ROS to Ignition.
Have a look at these?examples?explaining how to make communication connections from ROS to Ignition and vice versa.
Publish key strokes to ROS
Let's send messages to ROS using the?Key Publisher?an Ignition plugin.
Note:?Make sure to have all workspaces you need (ROS, Ignition and,?ros_ign...) sourced.
First we will start a bridge between ROS and Ignition specifying the topic at which the?Key Publisher?plugin sends messages and also the type of the messages as follows:
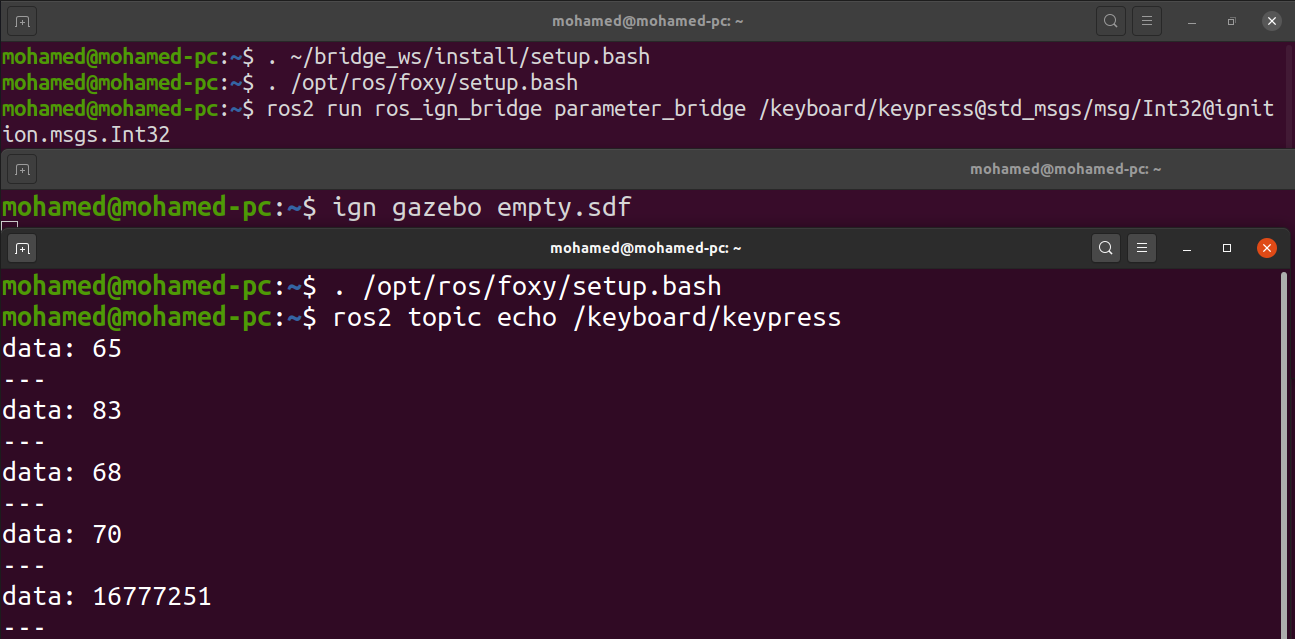
ros2 run ros_ign_bridge parameter_bridge /keyboard/keypress@std_msgs/msg/Int32@ignition.msgs.Int32We started a bridge on?/keyboard/keypress?topic with message of type?Int32. For ROS it is?std_msgs/msg/Int32?and for Ignition it is?ignition.msgs.Int32
In another terminal launch an Gazebo Sim world, for example the?empty.sdf?world:
ign gazebo empty.sdfThen add the?Key Publisher?plugin from the dropdown menu on the top right corner.

In another terminal start the ROS listener:
ros2 topic echo /keyboard/keypressThis command listens to the messages sent over the?/keyboard/keypress?topic.
On the Ignition window, press on the keyboard keys and you should find data on the listener terminal. This is what the terminals should look like:
Now it's your turn! Try to send data from ROS to Ignition. You can also try different data types and different directions of communication.
Video walk-through
A video walk-through of this tutorial is available from our YouTube channel:?Ignition tutorials: ROS 2 Foxy integration.
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 01.初识Python
- java旅游攻略管理系统Myeclipse开发mysql数据库web结构java编程计算机网页项目
- 【QT】QStringListModel类的应用介绍
- PyQt5程序的打包和发布
- 实验二 体系结构
- Web Animation API
- 前端项目对接protobufjs的时候,踩坑总结
- 57.6K star!一个免费开源的 API 开发生态系统
- 三分钟教你学会设置PICO不自动休眠
- 【FPGA/verilog -入门学习16】fpga状态机实现