STM32F103C8T6的定时器输出PWM,控制舵机和电机,STM32CubeMX和Hal库程序
发布时间:2024年01月24日
采用STM32F103C8T6的定时器,输出PWM信号,用于控制模型车的舵机和电机速度。
采用的是STM32CubeMX和Hal库函数程序。
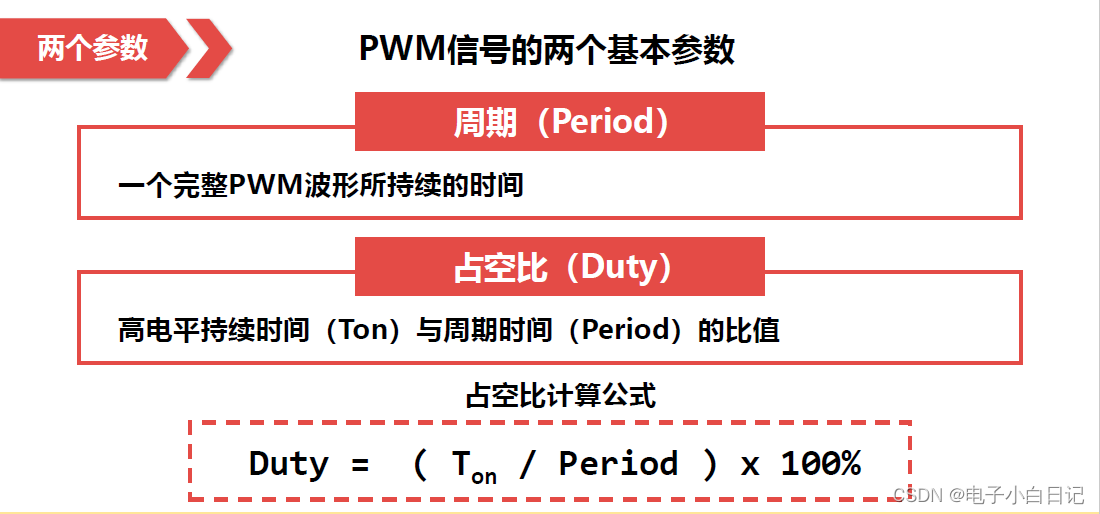
常规舵机和电调的PWM信号
舵机和电调的PWM信号的周期通常为20ms。
对于舵机,高电平部分时间一般为0.5ms~2.5ms范围内调整角度,0.5ms对应0°,1ms对应45°,1.5ms对应90°,2ms对应135°,2.5ms对应180°。
对于电机电调,高电平部分时间一般为1ms~2ms,1.5ms是归中,1ms和2ms分别为前进和后退的满速度。
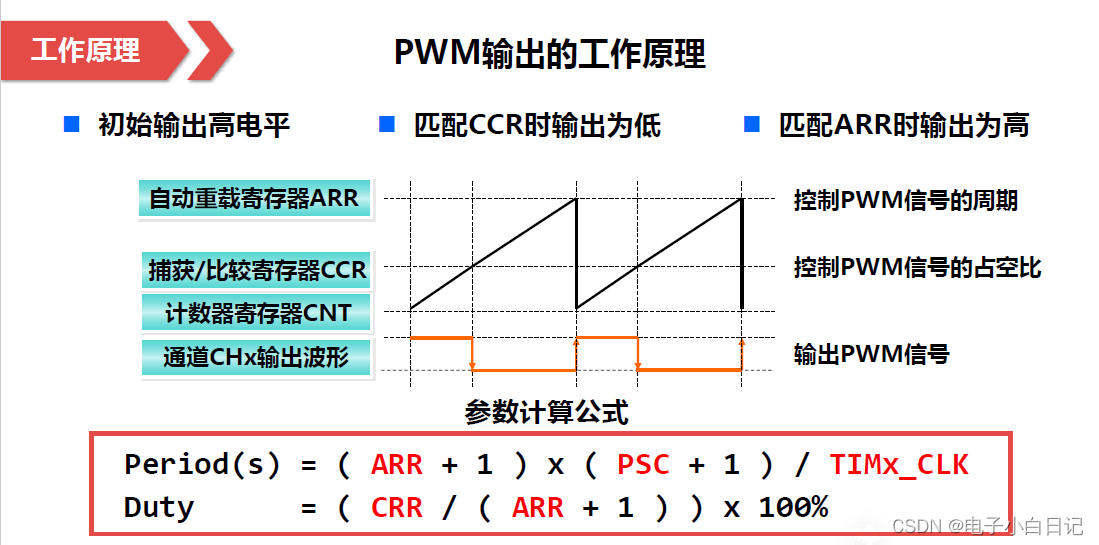
定时器的PWM输出功能
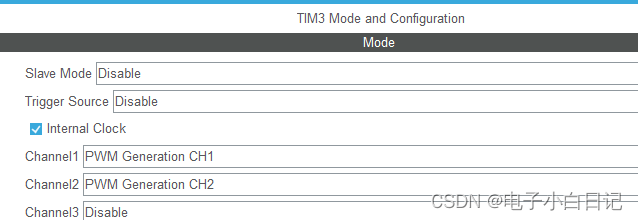
STM32CubeMX配置
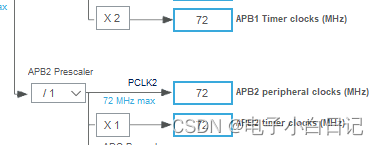
STM32F103C8T6定时器时钟设置为72MHz
采用TIM3定时器产生PWM信号
PSC设定为719,ARR设定为1999,用于产生20ms脉冲周期。
将遥控器的摇杆电位器通过ADC采集,并转化为0-100数字,此时CRR为0-100数字+100,就可以得到1ms~2ms的高电平占比
程序部分
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2);
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,(controler_data[0]+100));
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_2,(controler_data[1]+100));
模型车轮子方向归正和马达零速代码块
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,150);
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_2,150);
文章来源:https://blog.csdn.net/sealsystem/article/details/135758377
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- qt 信号和槽的简明使用
- 信息学奥赛一本通-编程启蒙3259:练42.5 大象喝水
- Matlab 点云曲线探测(算法不稳定,仅用于学习)
- 【玩转TableAgent数据智能分析】借助全球高校数据多维度分析案例,体验TableAgent如何助力用户轻松洞察数据,赋能企业高效数智化转型
- mysql 查询 某天的数据
- 13个NPM快速开发技巧:提升前端开发效率
- 中国硝酸异辛酯行业调研与投资预测报告(2024版)
- vue项目将后端返回的数据中P标签删除并换行展示
- Python(五)—— 闭包&装饰器
- CAN FD数据脱机记录仪的在汽车应用上的优势