YOLOv5改进 | 2023主干篇 | 华为最新VanillaNet主干替换Backbone实现大幅度长点
一、本文介绍
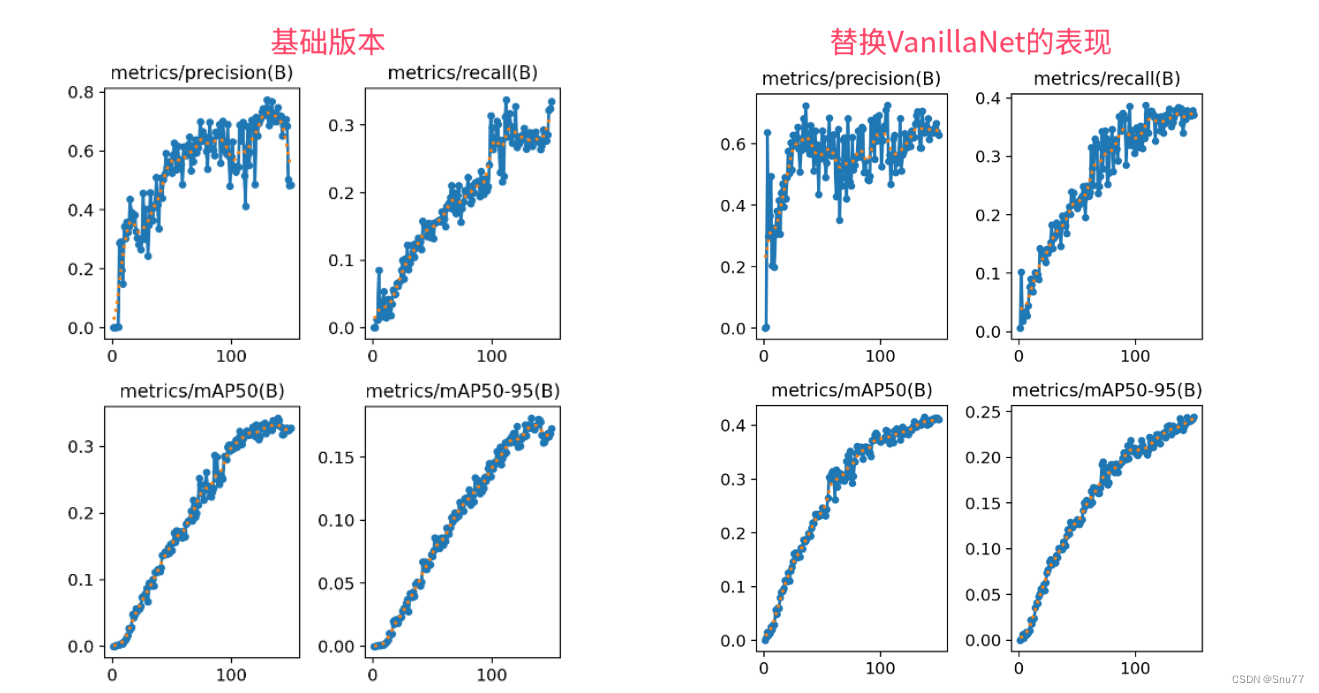
本文给大家来的改进机制是华为最新VanillaNet网络,其是今年最新推出的主干网络,VanillaNet是一种注重极简主义和效率的神经网络架构。它的设计简单,层数较少,避免了像深度架构和自注意力这样的复杂操作(需要注意的是该网络结构的通道数会被放大,GFLOPs的量会很高)。我将其替换整个YOLOv5的Backbone,在一些大目标和小目标检测上均有涨点,效果比上一篇RepViT的效果要好。我的实验数据集是一个包含1000张图片包含大中小的检测目标的数据集上(共有20+类别),下面我会附上基础版本和修改版本的训练对比图,同时我会手把手教你添加该网络结构。
推荐指数:?????
训练结果对比图->???
(有效性先用YOLOv8上的实验对比,后期会给大家补上)
目录
二、VanillaNet原理

论文地址:?官方论文地址
代码地址:?官方代码地址
2.2??VanillaNet的基本原理
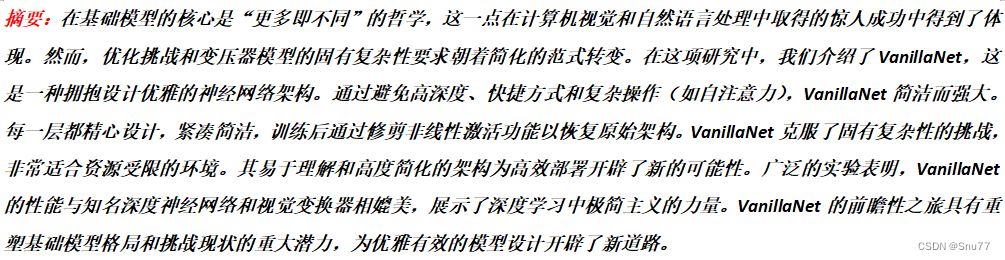
VanillaNet是一种注重极简主义和效率的神经网络架构。它的设计简单,层数较少,避免了像深度架构和自注意力这样的复杂操作。VanillaNet的关键特性包括深度训练策略,最初使用激活函数训练两个卷积层,随后这个激活函数逐渐简化为恒等映射,允许层合并。此外,VanillaNet还使用并行堆叠的激活函数来提高非线性,从而提升简单网络的性能。
VanillaNet的原理包括以下几个关键点:
1. 深度训练策略:初始阶段采用两个卷积层和一个激活函数进行训练,随着训练进程,激活函数逐渐转化为恒等映射,允许这些层合并,从而减少推断时间。
2. 串联激活函数:VanillaNet引入了并行堆叠激活函数来增强非线性,这对于简单网络的性能至关重要。
下面为大家展示了VanillaNet-6模型的架构:
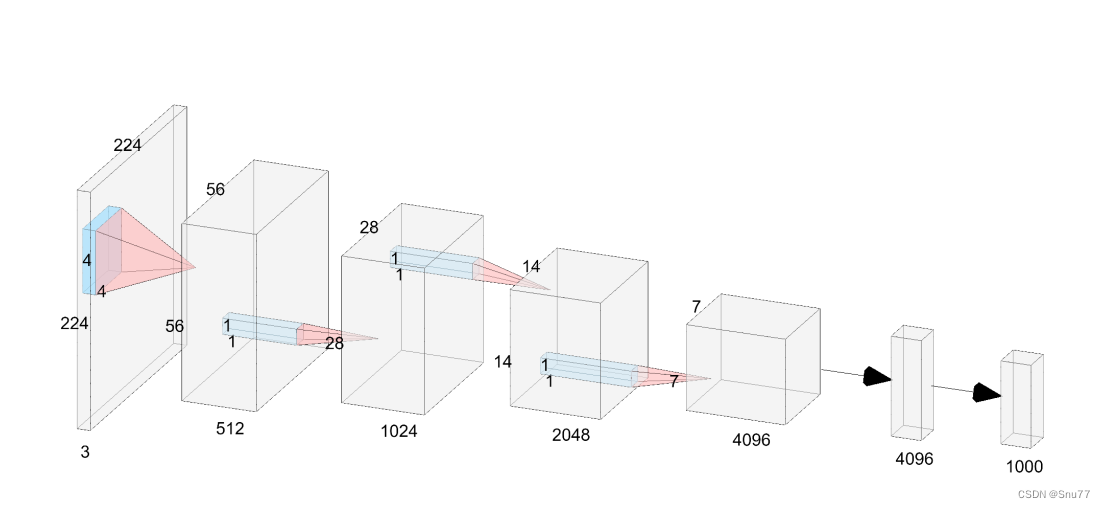
它仅由6个卷积层构成。输入特征的尺寸会在每个阶段降低,而通道数则会翻倍,这一设计借鉴了如AlexNet和VGGNet这类经典神经网络的设计理念。通过这种方式,VanillaNet-6模型能够以较低的计算成本处理图像数据,同时通过增加通道数来保持足够的特征表达能力。
2.2.1?深度训练策略
深度训练策略是指在神经网络训练初期采用比标准配置更多的层和更复杂的结构,这通过增加模型的非线性和表示能力来提高训练效果。(这是一种现在比较流行的网络设计方式,在训练的时候使用复杂的结构,推理的时候使用简单的结构)。训练的后期,这些额外层会通过技术手段合并或简化,以减少模型的复杂性和提高推理时的效率。
这种策略允许在初期利用深层结构的强大能力,在不牺牲推理速度的前提下,随着训练的进行,逐步优化模型结构,最终达到一个既能保持良好性能又能高效运行的平衡点。这样做的目的是在保持推理效率的同时,利用深度结构在训练过程中提供的额外能力。
2.2.2?串联激活函数
串联激活函数是指在一个神经网络的相同层或连续层中使用多个激活函数,这样可以增强网络处理非线性问题的能力。传统的神经网络可能只在每个卷积层后使用一个激活函数,而串联激活函数的做法是将多个激活函数按序排列,每个函数的输出成为下一个函数的输入。这种串联可以创建更复杂的函数映射,从而允许模型捕捉到更丰富的数据表示和特征。
三、VanillaNet的核心代码?
下面的代码是整个VanillaNet的核心代码,其中有个版本,对应的GFLOPs也不相同,使用方式看章节四。
# Copyright (C) 2023. Huawei Technologies Co., Ltd. All rights reserved.
# This program is free software; you can redistribute it and/or modify it under the terms of the MIT License.
# This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the MIT License for more details.
import torch
import torch.nn as nn
from timm.layers import weight_init
__all__ = ['vanillanet_5', 'vanillanet_6', 'vanillanet_7', 'vanillanet_8', 'vanillanet_9', 'vanillanet_10',
'vanillanet_11', 'vanillanet_12', 'vanillanet_13', 'vanillanet_13_x1_5', 'vanillanet_13_x1_5_ada_pool']
class activation(nn.ReLU):
def __init__(self, dim, act_num=3, deploy=False):
super(activation, self).__init__()
self.deploy = deploy
self.weight = torch.nn.Parameter(torch.randn(dim, 1, act_num * 2 + 1, act_num * 2 + 1))
self.bias = None
self.bn = nn.BatchNorm2d(dim, eps=1e-6)
self.dim = dim
self.act_num = act_num
weight_init.trunc_normal_(self.weight, std=.02)
def forward(self, x):
if self.deploy:
return torch.nn.functional.conv2d(
super(activation, self).forward(x),
self.weight, self.bias, padding=(self.act_num * 2 + 1) // 2, groups=self.dim)
else:
return self.bn(torch.nn.functional.conv2d(
super(activation, self).forward(x),
self.weight, padding=self.act_num, groups=self.dim))
def _fuse_bn_tensor(self, weight, bn):
kernel = weight
running_mean = bn.running_mean
running_var = bn.running_var
gamma = bn.weight
beta = bn.bias
eps = bn.eps
std = (running_var + eps).sqrt()
t = (gamma / std).reshape(-1, 1, 1, 1)
return kernel * t, beta + (0 - running_mean) * gamma / std
def switch_to_deploy(self):
if not self.deploy:
kernel, bias = self._fuse_bn_tensor(self.weight, self.bn)
self.weight.data = kernel
self.bias = torch.nn.Parameter(torch.zeros(self.dim))
self.bias.data = bias
self.__delattr__('bn')
self.deploy = True
class Block(nn.Module):
def __init__(self, dim, dim_out, act_num=3, stride=2, deploy=False, ada_pool=None):
super().__init__()
self.act_learn = 1
self.deploy = deploy
if self.deploy:
self.conv = nn.Conv2d(dim, dim_out, kernel_size=1)
else:
self.conv1 = nn.Sequential(
nn.Conv2d(dim, dim, kernel_size=1),
nn.BatchNorm2d(dim, eps=1e-6),
)
self.conv2 = nn.Sequential(
nn.Conv2d(dim, dim_out, kernel_size=1),
nn.BatchNorm2d(dim_out, eps=1e-6)
)
if not ada_pool:
self.pool = nn.Identity() if stride == 1 else nn.MaxPool2d(stride)
else:
self.pool = nn.Identity() if stride == 1 else nn.AdaptiveMaxPool2d((ada_pool, ada_pool))
self.act = activation(dim_out, act_num)
def forward(self, x):
if self.deploy:
x = self.conv(x)
else:
x = self.conv1(x)
x = torch.nn.functional.leaky_relu(x, self.act_learn)
x = self.conv2(x)
x = self.pool(x)
x = self.act(x)
return x
def _fuse_bn_tensor(self, conv, bn):
kernel = conv.weight
bias = conv.bias
running_mean = bn.running_mean
running_var = bn.running_var
gamma = bn.weight
beta = bn.bias
eps = bn.eps
std = (running_var + eps).sqrt()
t = (gamma / std).reshape(-1, 1, 1, 1)
return kernel * t, beta + (bias - running_mean) * gamma / std
def switch_to_deploy(self):
if not self.deploy:
kernel, bias = self._fuse_bn_tensor(self.conv1[0], self.conv1[1])
self.conv1[0].weight.data = kernel
self.conv1[0].bias.data = bias
# kernel, bias = self.conv2[0].weight.data, self.conv2[0].bias.data
kernel, bias = self._fuse_bn_tensor(self.conv2[0], self.conv2[1])
self.conv = self.conv2[0]
self.conv.weight.data = torch.matmul(kernel.transpose(1, 3),
self.conv1[0].weight.data.squeeze(3).squeeze(2)).transpose(1, 3)
self.conv.bias.data = bias + (self.conv1[0].bias.data.view(1, -1, 1, 1) * kernel).sum(3).sum(2).sum(1)
self.__delattr__('conv1')
self.__delattr__('conv2')
self.act.switch_to_deploy()
self.deploy = True
class VanillaNet(nn.Module):
def __init__(self, in_chans=3, num_classes=1000, dims=[96, 192, 384, 768],
drop_rate=0, act_num=3, strides=[2, 2, 2, 1], deploy=False, ada_pool=None, **kwargs):
super().__init__()
self.deploy = deploy
if self.deploy:
self.stem = nn.Sequential(
nn.Conv2d(in_chans, dims[0], kernel_size=4, stride=4),
activation(dims[0], act_num)
)
else:
self.stem1 = nn.Sequential(
nn.Conv2d(in_chans, dims[0], kernel_size=4, stride=4),
nn.BatchNorm2d(dims[0], eps=1e-6),
)
self.stem2 = nn.Sequential(
nn.Conv2d(dims[0], dims[0], kernel_size=1, stride=1),
nn.BatchNorm2d(dims[0], eps=1e-6),
activation(dims[0], act_num)
)
self.act_learn = 1
self.stages = nn.ModuleList()
for i in range(len(strides)):
if not ada_pool:
stage = Block(dim=dims[i], dim_out=dims[i + 1], act_num=act_num, stride=strides[i], deploy=deploy)
else:
stage = Block(dim=dims[i], dim_out=dims[i + 1], act_num=act_num, stride=strides[i], deploy=deploy,
ada_pool=ada_pool[i])
self.stages.append(stage)
self.depth = len(strides)
self.apply(self._init_weights)
self.width_list = [i.size(1) for i in self.forward(torch.randn(1, 3, 640, 640))]
def _init_weights(self, m):
if isinstance(m, (nn.Conv2d, nn.Linear)):
weight_init.trunc_normal_(m.weight, std=.02)
nn.init.constant_(m.bias, 0)
def change_act(self, m):
for i in range(self.depth):
self.stages[i].act_learn = m
self.act_learn = m
def forward(self, x):
results = []
if self.deploy:
x = self.stem(x)
else:
x = self.stem1(x)
x = torch.nn.functional.leaky_relu(x, self.act_learn)
x = self.stem2(x)
results.append(x)
for i in range(self.depth):
x = self.stages[i](x)
results.append(x)
return results
def _fuse_bn_tensor(self, conv, bn):
kernel = conv.weight
bias = conv.bias
running_mean = bn.running_mean
running_var = bn.running_var
gamma = bn.weight
beta = bn.bias
eps = bn.eps
std = (running_var + eps).sqrt()
t = (gamma / std).reshape(-1, 1, 1, 1)
return kernel * t, beta + (bias - running_mean) * gamma / std
def switch_to_deploy(self):
if not self.deploy:
self.stem2[2].switch_to_deploy()
kernel, bias = self._fuse_bn_tensor(self.stem1[0], self.stem1[1])
self.stem1[0].weight.data = kernel
self.stem1[0].bias.data = bias
kernel, bias = self._fuse_bn_tensor(self.stem2[0], self.stem2[1])
self.stem1[0].weight.data = torch.einsum('oi,icjk->ocjk', kernel.squeeze(3).squeeze(2),
self.stem1[0].weight.data)
self.stem1[0].bias.data = bias + (self.stem1[0].bias.data.view(1, -1, 1, 1) * kernel).sum(3).sum(2).sum(1)
self.stem = torch.nn.Sequential(*[self.stem1[0], self.stem2[2]])
self.__delattr__('stem1')
self.__delattr__('stem2')
for i in range(self.depth):
self.stages[i].switch_to_deploy()
self.deploy = True
def vanillanet_5(pretrained=False,in_22k=False, **kwargs):
model = VanillaNet(dims=[128*4, 256*4, 512*4, 1024*4], strides=[2,2,2], **kwargs)
return model
def vanillanet_6(pretrained=False,in_22k=False, **kwargs):
model = VanillaNet(dims=[128*4, 256*4, 512*4, 1024*4, 1024*4], strides=[2,2,2,1], **kwargs)
return model
def vanillanet_7(pretrained=False,in_22k=False, **kwargs):
model = VanillaNet(dims=[128*4, 128*4, 256*4, 512*4, 1024*4, 1024*4], strides=[1,2,2,2,1], **kwargs)
return model
def vanillanet_8(pretrained=False, in_22k=False, **kwargs):
model = VanillaNet(dims=[128*4, 128*4, 256*4, 512*4, 512*4, 1024*4, 1024*4], strides=[1,2,2,1,2,1], **kwargs)
return model
def vanillanet_9(pretrained=False, in_22k=False, **kwargs):
model = VanillaNet(dims=[128*4, 128*4, 256*4, 512*4, 512*4, 512*4, 1024*4, 1024*4], strides=[1,2,2,1,1,2,1], **kwargs)
return model
def vanillanet_10(pretrained=False, in_22k=False, **kwargs):
model = VanillaNet(
dims=[128*4, 128*4, 256*4, 512*4, 512*4, 512*4, 512*4, 1024*4, 1024*4],
strides=[1,2,2,1,1,1,2,1],
**kwargs)
return model
def vanillanet_11(pretrained=False, in_22k=False, **kwargs):
model = VanillaNet(
dims=[128*4, 128*4, 256*4, 512*4, 512*4, 512*4, 512*4, 512*4, 1024*4, 1024*4],
strides=[1,2,2,1,1,1,1,2,1],
**kwargs)
return model
def vanillanet_12(pretrained=False, in_22k=False, **kwargs):
model = VanillaNet(
dims=[128*4, 128*4, 256*4, 512*4, 512*4, 512*4, 512*4, 512*4, 512*4, 1024*4, 1024*4],
strides=[1,2,2,1,1,1,1,1,2,1],
**kwargs)
return model
def vanillanet_13(pretrained=False, in_22k=False, **kwargs):
model = VanillaNet(
dims=[128*4, 128*4, 256*4, 512*4, 512*4, 512*4, 512*4, 512*4, 512*4, 512*4, 1024*4, 1024*4],
strides=[1,2,2,1,1,1,1,1,1,2,1],
**kwargs)
return model
def vanillanet_13_x1_5(pretrained=False, in_22k=False, **kwargs):
model = VanillaNet(
dims=[128*6, 128*6, 256*6, 512*6, 512*6, 512*6, 512*6, 512*6, 512*6, 512*6, 1024*6, 1024*6],
strides=[1,2,2,1,1,1,1,1,1,2,1],
**kwargs)
return model
def vanillanet_13_x1_5_ada_pool(pretrained=False, in_22k=False, **kwargs):
model = VanillaNet(
dims=[128*6, 128*6, 256*6, 512*6, 512*6, 512*6, 512*6, 512*6, 512*6, 512*6, 1024*6, 1024*6],
strides=[1,2,2,1,1,1,1,1,1,2,1],
ada_pool=[0,38,19,0,0,0,0,0,0,10,0],
**kwargs)
return model
四、手把手教你添加VanillaNet网络结构
这个主干的网络结构添加起来算是所有的改进机制里最麻烦的了,因为有一些网略结构可以用yaml文件搭建出来,有一些网络结构其中的一些细节根本没有办法用yaml文件去搭建,用yaml文件去搭建会损失一些细节部分(而且一个网络结构设计很多细节的结构修改方式都不一样,一个一个去修改大家难免会出错),所以这里让网络直接返回整个网络,然后修改部分 yolo代码以后就都以这种形式添加了,以后我提出的网络模型基本上都会通过这种方式修改,我也会进行一些模型细节改进。创新出新的网络结构大家直接拿来用就可以的。下面开始添加教程->
(同时每一个后面都有代码,大家拿来复制粘贴替换即可,但是要看好了不要复制粘贴替换多了)
修改一
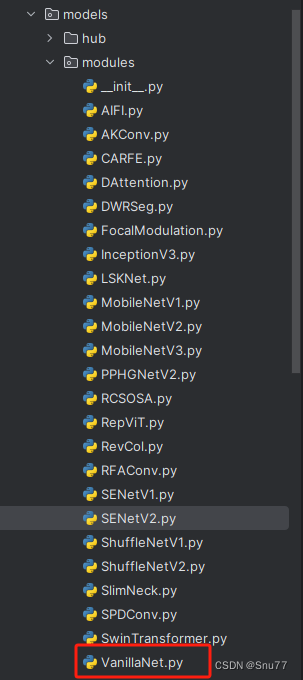
我们复制网络结构代码到“yolov5-master/models”目录下创建一个目录,我这里的名字是modules(如果将文件放在models下面随着改进机制越来越多不太好区分,所以创建一个文件目录将改进机制全部放在里面)?,然后创建一个py文件将代码复制粘贴到里面我这里起的名字是VanillaNet。
?
修改二
然后我们在我们创建的目录里面创建一个初始化文件'__init__.py',然后在里面导入我们同级目录的所有改进机制
??
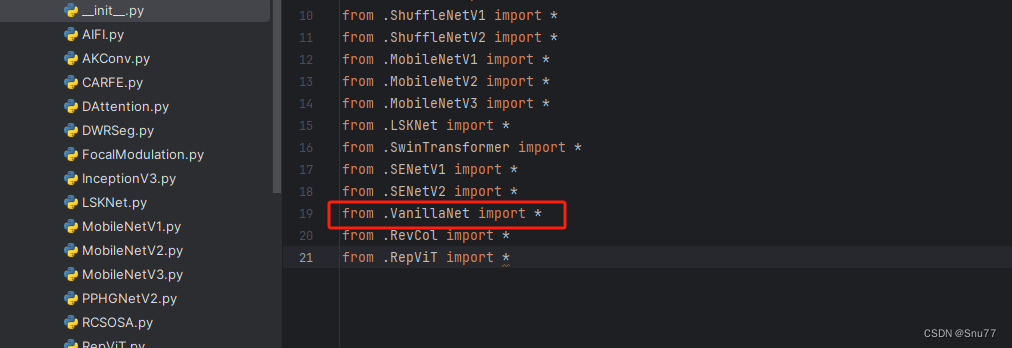
修改三
我们找到如下文件'models/yolo.py'在开头里面导入我们的模块,这里需要注意要将代码放在common导入的文件上面,否则有一些模块会使用我们modules里面的,可能同名导致报错,这里如果你使用多个我的改进机制填写一个即可,不用重复添加。
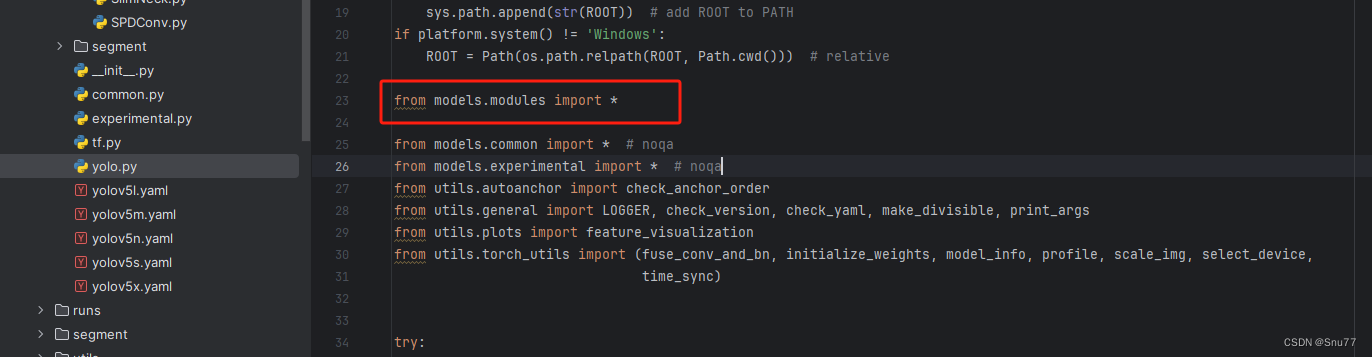
修改四
添加如下两行代码,根据行数找相似的代码进行添加

修改五
找到七百多行大概把具体看图片,按照图片来修改就行,添加红框内的部分,注意没有()只是函数名,我这里只添加了部分的版本,大家有兴趣这个VanillaNet还有更多的版本可以添加,看我给的代码函数头即可。
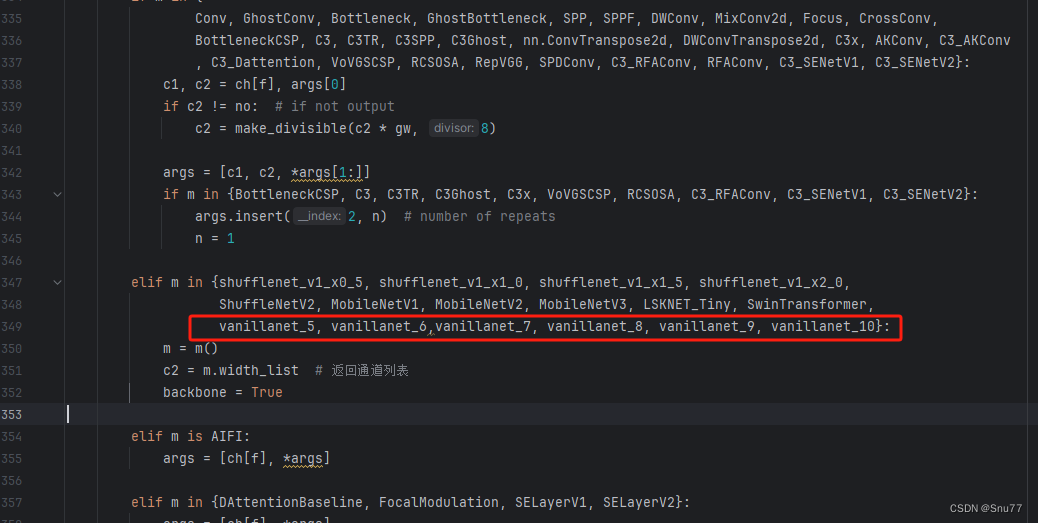
elif m in {自行添加对应的模型即可,下面都是一样的}:
m = m()
c2 = m.width_list # 返回通道列表
backbone = True修改五?
下面的两个红框内都是需要改动的。?
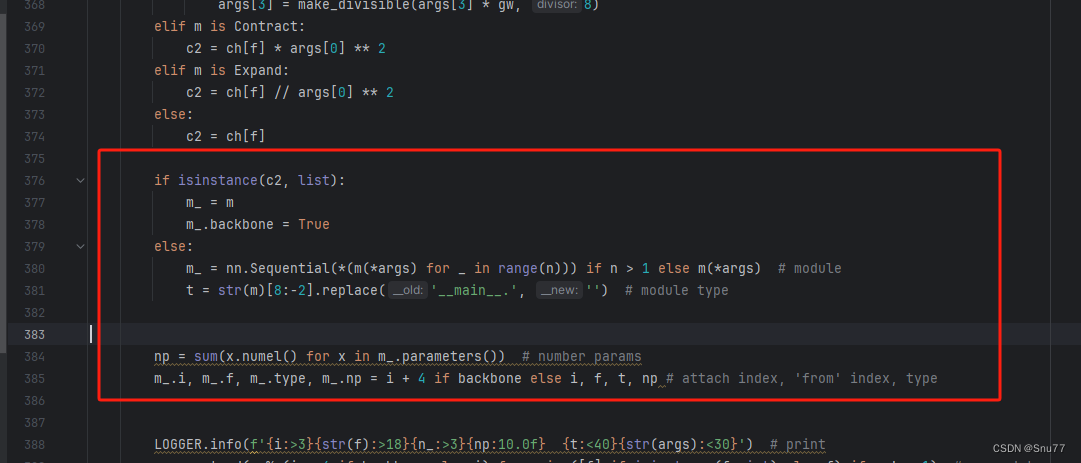
if isinstance(c2, list):
m_ = m
m_.backbone = True
else:
m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
t = str(m)[8:-2].replace('__main__.', '') # module type
np = sum(x.numel() for x in m_.parameters()) # number params
m_.i, m_.f, m_.type, m_.np = i + 4 if backbone else i, f, t, np # attach index, 'from' index, type修改六?
如下的也需要修改,全部按照我的来。
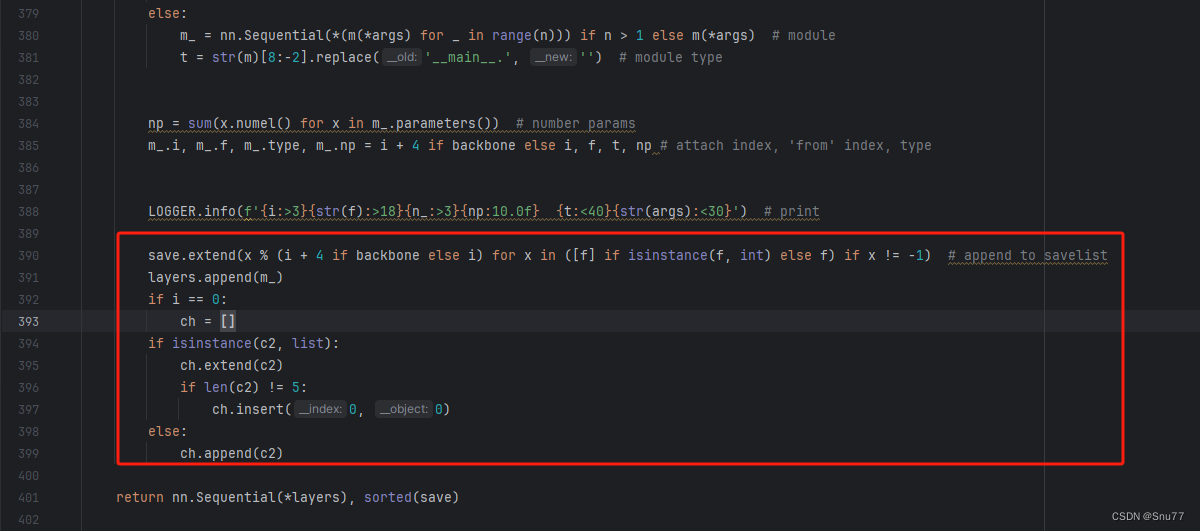
代码如下把原先的代码替换了即可。?
save.extend(x % (i + 4 if backbone else i) for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
layers.append(m_)
if i == 0:
ch = []
if isinstance(c2, list):
ch.extend(c2)
if len(c2) != 5:
ch.insert(0, 0)
else:
ch.append(c2)修改七
修改七和前面的都不太一样,需要修改前向传播中的一个部分,?已经离开了parse_model方法了。
可以在图片中开代码行数,没有离开task.py文件都是同一个文件。 同时这个部分有好几个前向传播都很相似,大家不要看错了,是70多行左右的!!!,同时我后面提供了代码,大家直接复制粘贴即可,有时间我针对这里会出一个视频。
找到如下的代码,这里不太好找,我给大家上传一个原始的样子。
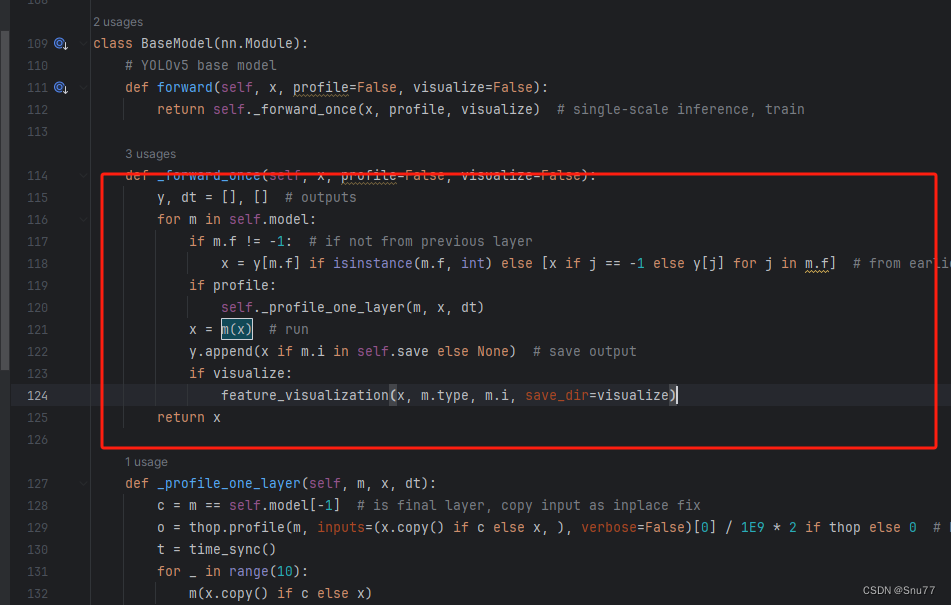
然后我们用后面的代码进行替换,替换完之后的样子如下->?
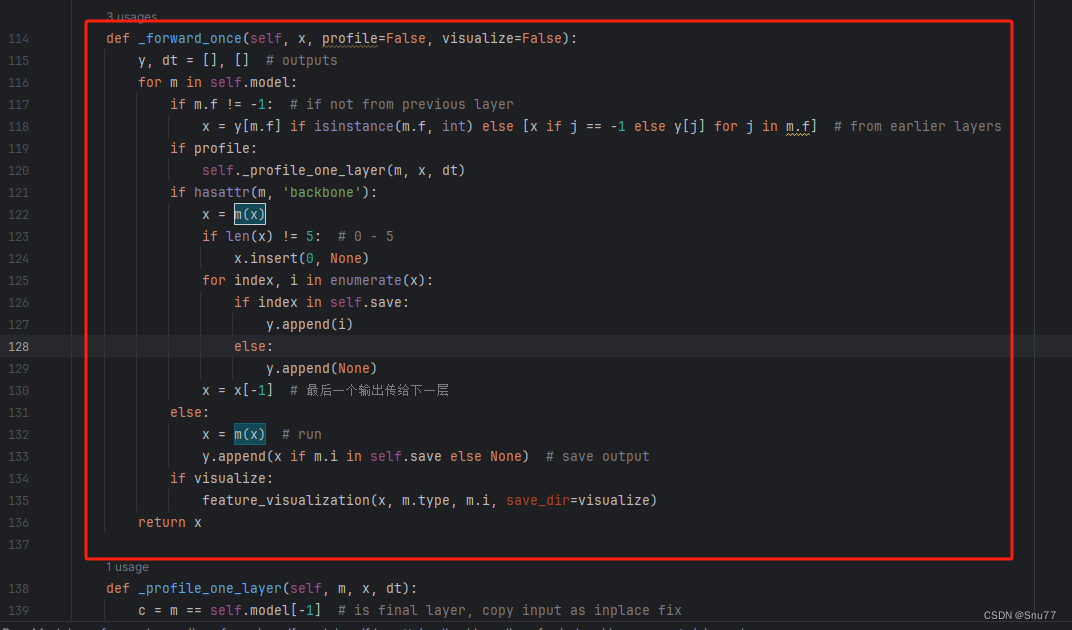 ??
??
代码如下->
def _forward_once(self, x, profile=False, visualize=False):
y, dt = [], [] # outputs
for m in self.model:
if m.f != -1: # if not from previous layer
x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
if profile:
self._profile_one_layer(m, x, dt)
if hasattr(m, 'backbone'):
x = m(x)
if len(x) != 5: # 0 - 5
x.insert(0, None)
for index, i in enumerate(x):
if index in self.save:
y.append(i)
else:
y.append(None)
x = x[-1] # 最后一个输出传给下一层
else:
x = m(x) # run
y.append(x if m.i in self.save else None) # save output
if visualize:
feature_visualization(x, m.type, m.i, save_dir=visualize)
return x到这里就完成了修改部分,但是这里面细节很多,大家千万要注意不要替换多余的代码,导致报错,也不要拉下任何一部,都会导致运行失败,而且报错很难排查!!!很难排查!!!?
五、VanillaNet的yaml文件
复制如下yaml文件进行运行!!!?
# YOLOv5 🚀 by Ultralytics, AGPL-3.0 license
# Parameters
nc: 80 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.25 # layer channel multiple
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
backbone:
# [from, number, module, args]
[[-1, 1, vanillanet_5, []], # 0-4-P1/
[-1, 1, SPPF, [1024, 5]], # 5
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 3], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 9
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 2], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 13 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 9], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 16 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 5], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 19 (P5/32-large)
[[13, 16, 19], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
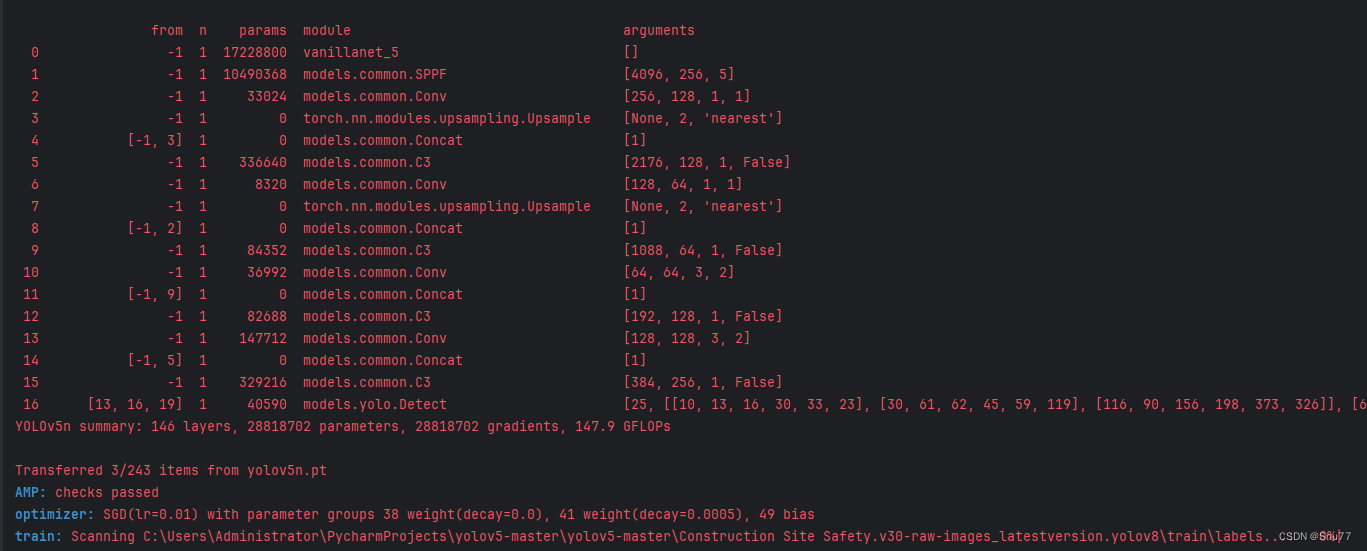
六、成功运行记录?
下面是成功运行的截图,已经完成了有1个epochs的训练,图片太大截不全第2个epochs了。?
 ???
???
?
七、本文总结
到此本文的正式分享内容就结束了,在这里给大家推荐我的YOLOv5改进有效涨点专栏,本专栏目前为新开的平均质量分97分,后期我会根据各种最新的前沿顶会进行论文复现,也会对一些老的改进机制进行补充,目前本专栏免费阅读(暂时,大家尽早关注不迷路~),如果大家觉得本文帮助到你了,订阅本专栏,关注后续更多的更新~
 ?
?
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 2023.1.21 关于 Redis 主从复制详解
- 动态规划 | 鸡蛋问题 | 元旦假期来点“蛋”题
- JAVA电商平台 免 费 搭 建 B2B2C商城系统 多用户商城系统 直播带货 新零售商城 o2o商城 电子商务 拼团商城 分销商城
- 【面试高频算法解析】算法练习6 广度优先搜索
- 1.17 第四章+第五章 多点通信+域套接字
- Transformer基本结构
- jsp的介绍
- IPSec的起源-基础知识都需要掌握
- flowable工作流看这一篇就够了(进阶篇 下)
- MySQL面试题 | 05.精选MySQL面试题