卡尔曼滤波学习笔记
发布时间:2023年12月17日
1卡尔曼滤波原理
1.1状态转移??
个人对矩阵浅显的理解,规定了矩阵(Matrix)是一个按照长方阵列排列的复数或实数集合。再规定两个这种集合间可以进行加减乘除,最后规定矩阵(数学术语)_百度百科 (baidu.com)加减乘除是怎么个加减乘除。以此基础推演发散高出各种花样。

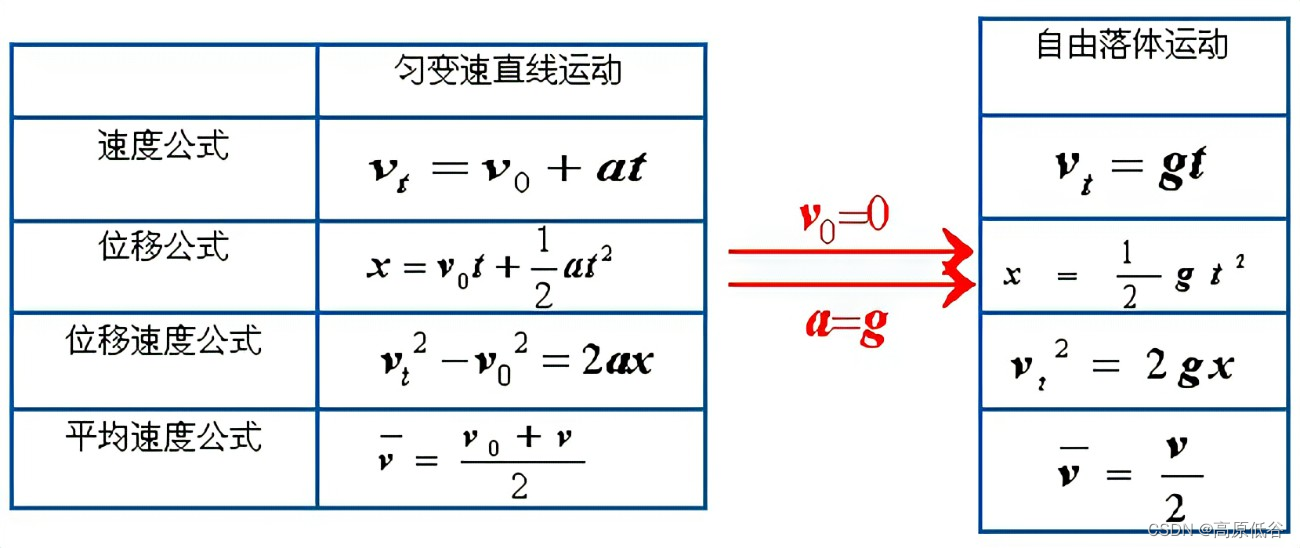
可以通过计算得到过段时间的状态,但是这是一种推测。
1.2协方差矩阵
协方差矩阵:按照长方阵列排列的协方差值,下图为协方差值的计算过程
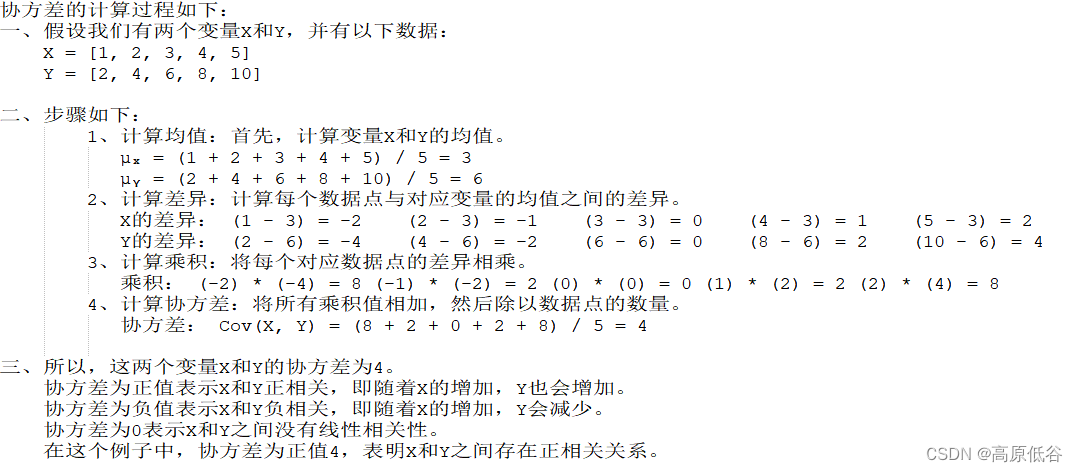 所有推测都是包含噪声的,噪声越大,不确定性就越大。某次推测的不确定性的大小,可以用协方差矩阵来表示。即用多个协方差值描述推测的不确定性的大小。
所有推测都是包含噪声的,噪声越大,不确定性就越大。某次推测的不确定性的大小,可以用协方差矩阵来表示。即用多个协方差值描述推测的不确定性的大小。

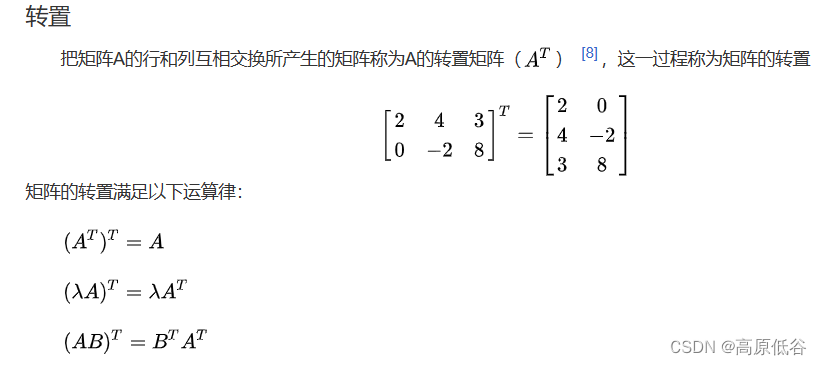
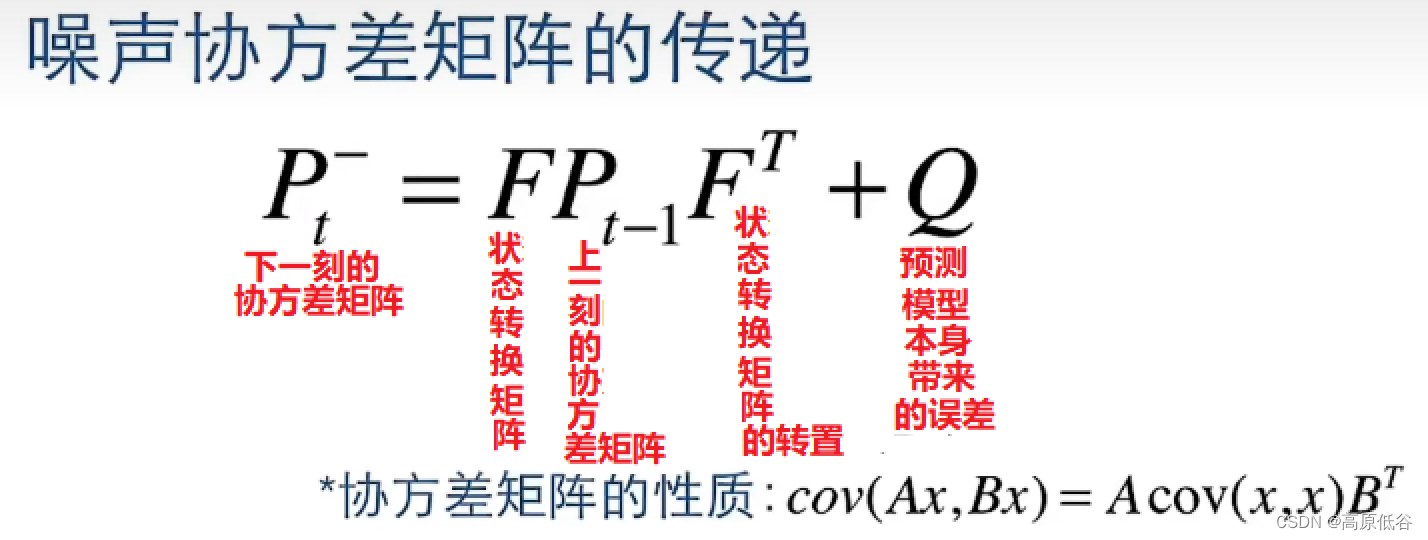
下图公式二用于表示不确定性在各个时间的传递关系
1.3观察矩阵

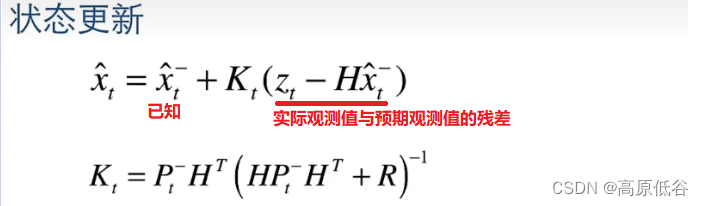
1.4状态更新
下图公式推导比较复杂,这里只是定性的分析一下。
我们已经有了观测量Z和观测噪声的协方差矩阵R,那么如何把他们整合进,我们对状态X的估计呢?
卡尔曼系数K作用:
1)权衡预测状态协方差P和观测噪声的协方差矩阵R的大小后,决定是详细预测模型多一点呢?还是相信观察模型多一点?
2)把残差的表现形式,由观察域,转化到状态域。在我们这个行车的例子中,我们观察到了汽车的位置,但是K里面已经包含了协方程矩阵P的信息,所以就是在利用位置和速度两个量的相关性,从位置的残差里推出了速度的残差。实现对车的状态的位置和速度两个维度,进行同时修正。
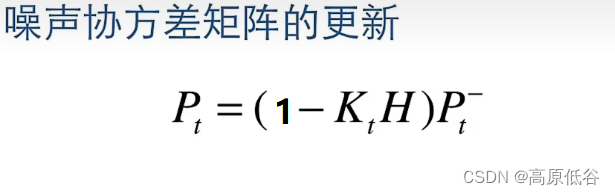
1.5噪声协方差矩阵的更新
文章来源:https://blog.csdn.net/weixin_55255438/article/details/134983819
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!