一个成功的camera案例:ros2+gazebo+摄像头
发布时间:2024年01月13日
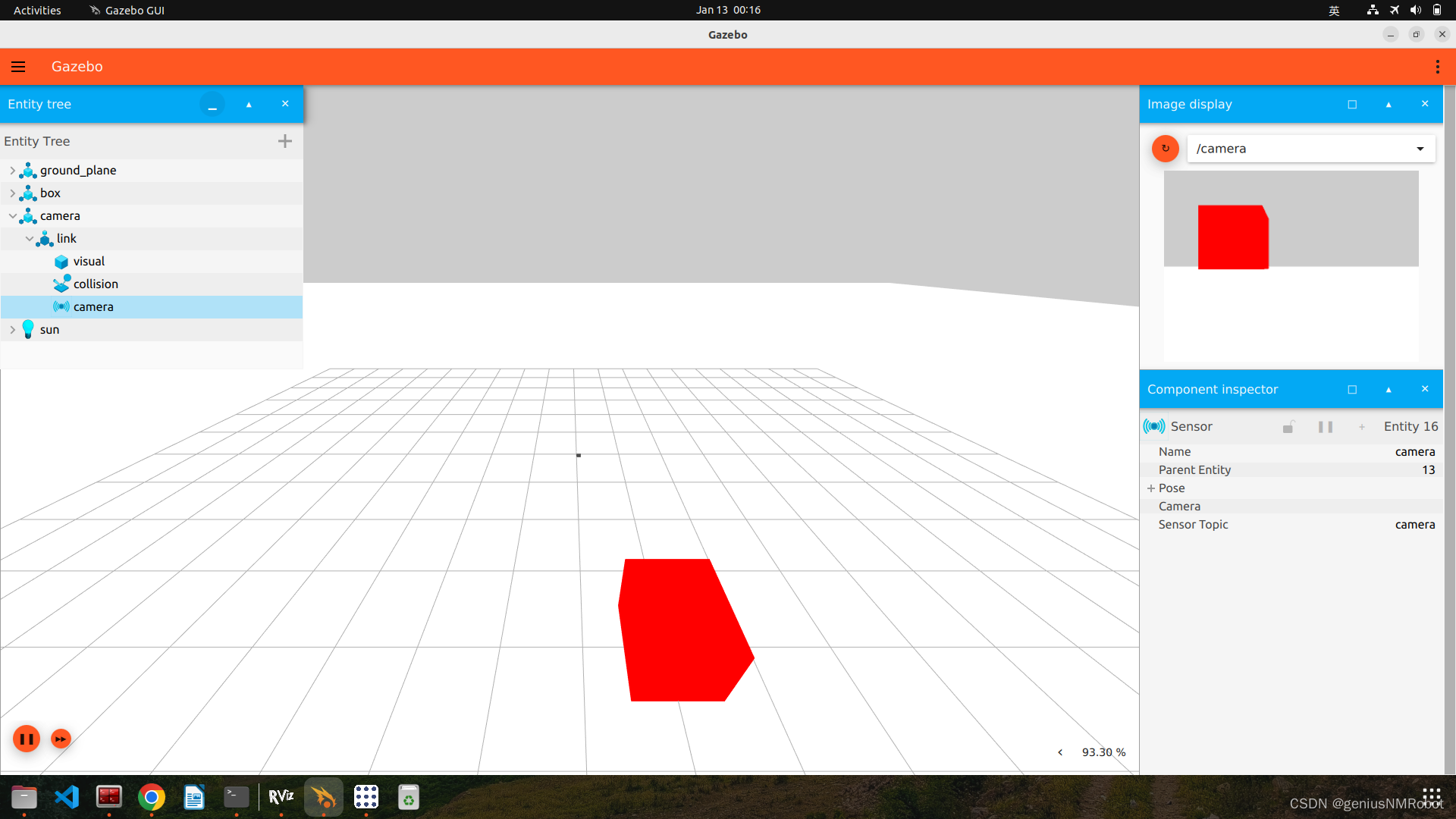

各位看:随着大物体的移动,在涉嫌头的位置也发生了改变-----右上角那个/camera的位置也变了
右上角那个是摄像头图案,以下是仓库链接:
ros-ign-gazebo-camera: https://github.com/arashsm79/ros-ign-gazebo-camera.git一个ros2+摄像头的示例
?如果你输入:
ros2 topic list?
输入:
ros2 topic echo /camera
这位高人的摄像头是确实在发布信息,如果rviz没有图像就是rviz配置有问题了?
把上图那个frema_id填入rviz2的Fixed Frame里面,就会发现rvize2开始接受到数据,----数据在不停的接受-----"570 message received"

这个时候还是没有图像:可以看到一个warning:

没有受到/camera_info类型的信息,估计是没有启动对应的消息类型转换ros_gz_bridge
文章来源:https://blog.csdn.net/geniusChinaHN/article/details/135564246
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 乔拓云智能建站:让你的官网与众不同
- khbc靶场小记(upload 666靶场)
- Java版企业电子招标采购系统源码—鸿鹄电子招投标系统-企业战略布局下的采购寻源
- 第四十章 其他特殊主题 - 处理导入时意外的元素和属性
- 用通俗易懂的方式讲解:使用 Langchain 和 Hugging Face ,轻松实现大模型 RAG 用法
- 算法基础介绍
- 【数据分享】2024年我国主要城市地铁站点和线路数据
- Web实战丨基于django+html+css+js的在线博客网站
- 探索JavaScript事件流:DOM中的神奇旅程
- 多域名证书和通配符证书的区别?