二分图
发布时间:2024年01月08日
目录
二分图
- 二分图,又叫二部图,将所有点分成两个集合,使得所有边只出现在集合之间的点之间,而集合内部的点之间没有边。
- 二分图当且仅当图中没有奇数环。只要图中环的边数没奇数个数的,它就是二分图。
- 二分图可以是连通的,也可以是不连通的
- 树一定二分图。

染色法判定二分图
题目如下:
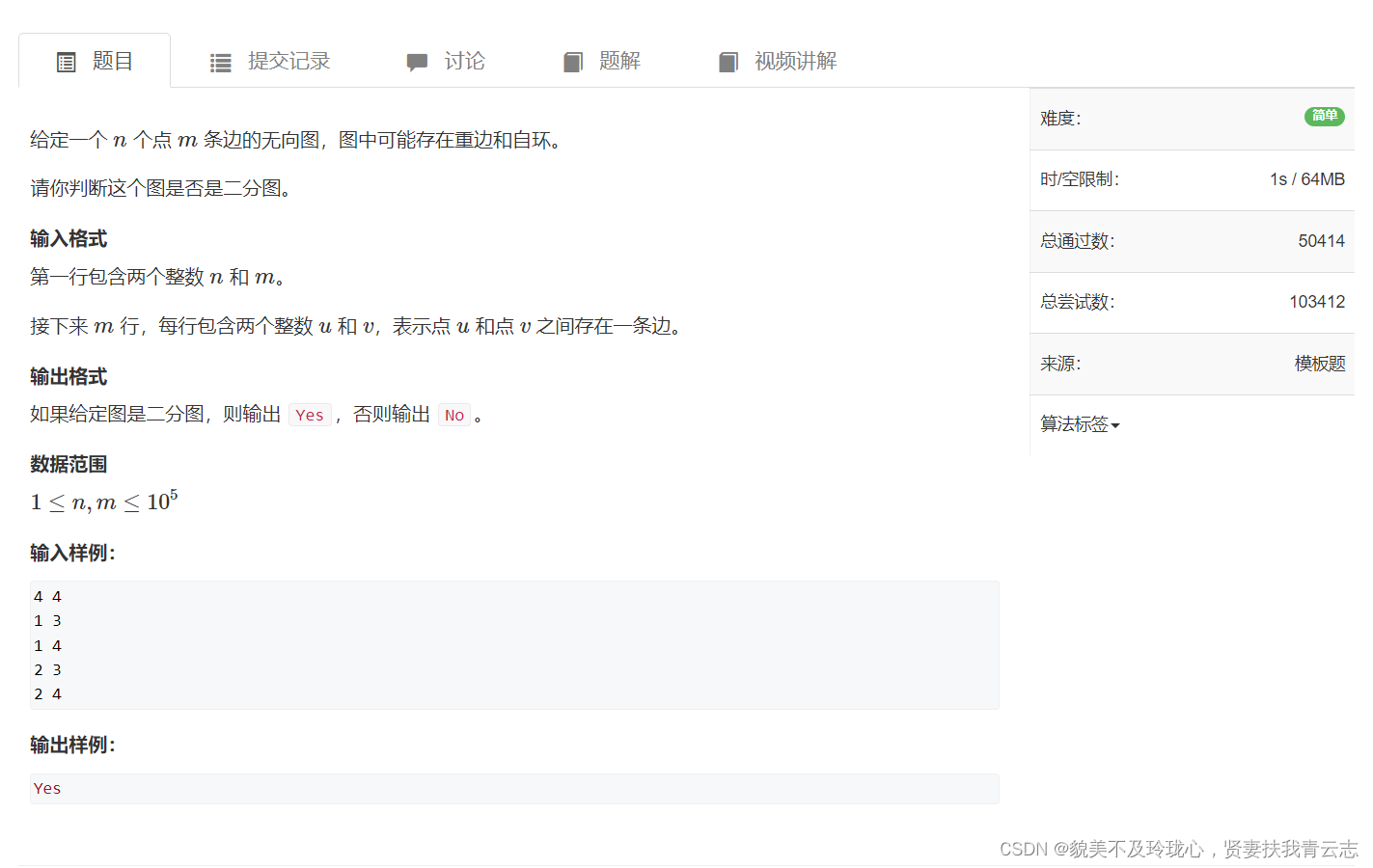
如果判断一个图是不是二分图?
- 开始对任意一未染色的顶点染色。
- 判断其相邻的顶点中,若未染色则将其染上和相邻顶点不同的颜色。
- 若已经染色且颜色和相邻顶点的颜色相同则说明不是二分图,若颜色不同则继续判断。
- bfs和dfs可以搞定!
解题代码:
#include <iostream>
#include <cstring>
#include <algorithm>
using namespace std;
const int N = 100010 * 2;
int e[N], ne[N], idx;//邻接表存储图
int h[N];
int color[N];//保存各个点的颜色,0 未染色,1 是红色,2 是黑色
int n, m;//点和边
void add(int a, int b)//邻接表插入点和边
{
e[idx] = b, ne[idx]= h[a], h[a] = idx++;
}
bool dfs(int u, int c)//深度优先遍历,参数1:点的编号 参数2:要染的颜色
{
color[u] = c;//u的点成 c 染色
//遍历和 u 相邻的点
for(int i = h[u]; i!= -1; i = ne[i])
{
int b = e[i];
if(!color[b])//相邻的点没有颜色,则递归处理这个相邻点
{
if(!dfs(b, 3 - c)) return false;//(3 - 1 = 2, 如果 u 的颜色是2,则和 u 相邻的染成 1)
//(3 - 2 = 1, 如果 u 的颜色是1,则和 u 相邻的染成 2)
}
else if(color[b] && color[b] != 3 - c)//如果已经染色,判断颜色是否为 3 - c
{
return false;//如果不是,说明冲突,返回
}
}
return true;
}
int main()
{
memset(h, -1, sizeof h);//初始化邻接表
cin >> n >> m;
for(int i = 1; i <= m; i++)//读入边
{
int a, b;
cin >> a >> b;
add(a, b), add(b, a);
}
for(int i = 1; i <= n; i++)//遍历点
{
if(!color[i])//如果没染色
{
//以没染色的点为起点进行dfs搜索
if(!dfs(i, 1))//染色该点,并递归处理和它相邻的点
{
cout << "No" << endl;//出现矛盾,输出NO
return 0;
}
}
}
cout << "Yes" << endl;//全部染色完成,没有矛盾,输出YES
return 0;
}算法板子:O(m+n),n表示点数,m表示边数
int n; // n表示点数
int h[N], e[M], ne[M], idx; // 邻接表存储图
int color[N]; // 表示每个点的颜色,-1表示未染色,0表示白色,1表示黑色
// 参数:u表示当前节点,c表示当前点的颜色
bool dfs(int u, int c)
{
color[u] = c;
for (int i = h[u]; i != -1; i = ne[i])
{
int j = e[i];
if (color[j] == -1)
{
if (!dfs(j, !c)) return false;
}
else if (color[j] == c) return false;
}
return true;
}
bool check()
{
memset(color, -1, sizeof color);
bool flag = true;
for (int i = 1; i <= n; i ++ )
if (color[i] == -1)
if (!dfs(i, 0))
{
flag = false;
break;
}
return flag;
}匈牙利算法
题目如下:

解题代码
#include <cstring>
#include <iostream>
#include <algorithm>
using namespace std;
const int N = 510, M = 100010;
int n1, n2, m;
int h[N], e[M], ne[M], idx;
int match[N];
bool st[N];
void add(int a, int b)
{
e[idx] = b, ne[idx] = h[a], h[a] = idx ++ ;
}
bool find(int x)
{
for (int i = h[x]; i != -1; i = ne[i])
{
int j = e[i];
if (!st[j])
{
st[j] = true;
if (match[j] == 0 || find(match[j]))
{
match[j] = x;
return true;
}
}
}
return false;
}
int main()
{
scanf("%d%d%d", &n1, &n2, &m);
memset(h, -1, sizeof h);
while (m -- )
{
int a, b;
scanf("%d%d", &a, &b);
add(a, b);
}
int res = 0;
for (int i = 1; i <= n1; i ++ )
{
memset(st, false, sizeof st);
if (find(i)) res ++ ;
}
printf("%d\n", res);
return 0;
}算法板子:O(m*n),n表示点数,m表示边数
int n1, n2; // n1表示第一个集合中的点数,n2表示第二个集合中的点数
int h[N], e[M], ne[M], idx; // 邻接表存储所有边,匈牙利算法中只会用到从第一个集合指向第二个集合的边,所以这里只用存一个方向的边
int match[N]; // 存储第二个集合中的每个点当前匹配的第一个集合中的点是哪个
bool st[N]; // 表示第二个集合中的每个点是否已经被遍历过
bool find(int x)
{
for (int i = h[x]; i != -1; i = ne[i])
{
int j = e[i];
if (!st[j])
{
st[j] = true;
if (match[j] == 0 || find(match[j]))
{
match[j] = x;
return true;
}
}
}
return false;
}
// 求最大匹配数,依次枚举第一个集合中的每个点能否匹配第二个集合中的点
int res = 0;
for (int i = 1; i <= n1; i ++ )
{
memset(st, false, sizeof st);
if (find(i)) res ++ ;
}?
文章来源:https://blog.csdn.net/qq_61553520/article/details/135446896
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 四种方法将 Docker Registry 迁移至 Harbor
- Vue的父子页面如何相互传值和调用方法
- Linux cp 命令
- 世微 AP510X 单路低压差线性恒流芯片 3-100V内置ESOP8 LED照明
- 关于Triple DES(3DES)对称加密算法
- 【EI会议征稿通知】第三届计算机应用与信息系统国际研讨会 (ISCAIS 2024)
- 类和对象(中)
- FFmpeg在线转码(FFmpeg网页版)
- Hive基础知识(三):Linux系统下的MySQL安装
- 如何正确使用电感和磁珠