自动驾驶轨迹规划之碰撞检测(二)
发布时间:2024年01月17日
欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
目录
大家可以先阅读之前的博客?
1.基于凸优化
以此为代表的算法则是OBCA
无论是自车还是障碍物都可以表示为凸多边形,因此可以表示为多个超平面围成的空间

同时,自车与障碍物的避撞表达式就可以写成如下式子

然后就可以作为碰撞约束加入这样一个包含边界约束的最优控制问题中
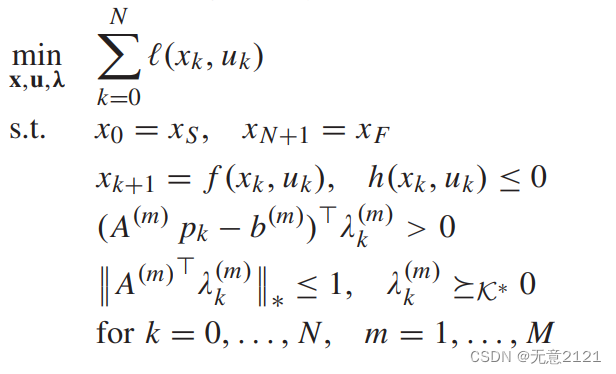
感兴趣的可以参考原文Optimization-Based Collision Avoidance | IEEE Journals & Magazine | IEEE Xplore?
2.具身足迹
这是一个解决连续碰撞检测的概念,因为常用的碰撞检测算法常用于离散点的碰撞检测,忽略了离散点之间可能产生的碰撞,如下图所示

而具身足迹的意思则是在两个离散点之间自动驾驶汽车自身所覆盖的足迹,这并不是一个新的概念,计算机图形学中的扫掠体与这个具身足迹的意义相同。
李柏老师用矩形框去近似具身足迹,也就实现了连续碰撞检测,但是有些保守,不适合狭窄空间,但是安全性较好,具体结合曲率去分析这个具身足迹的性质可以参考原文
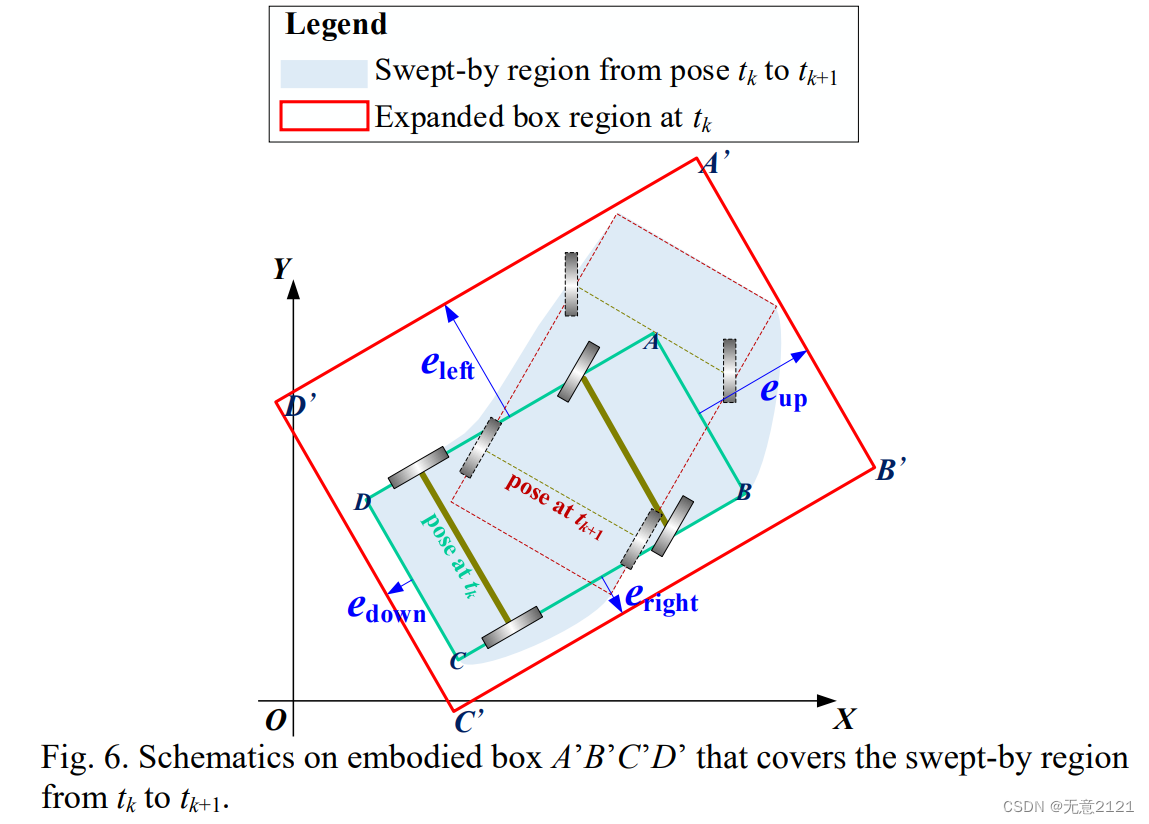
高飞老师团队在IROS2023里提出了一种隐式SDF,里面也就用到了扫掠体,也就是三维的具身足迹,以连续可微的形式进行避障

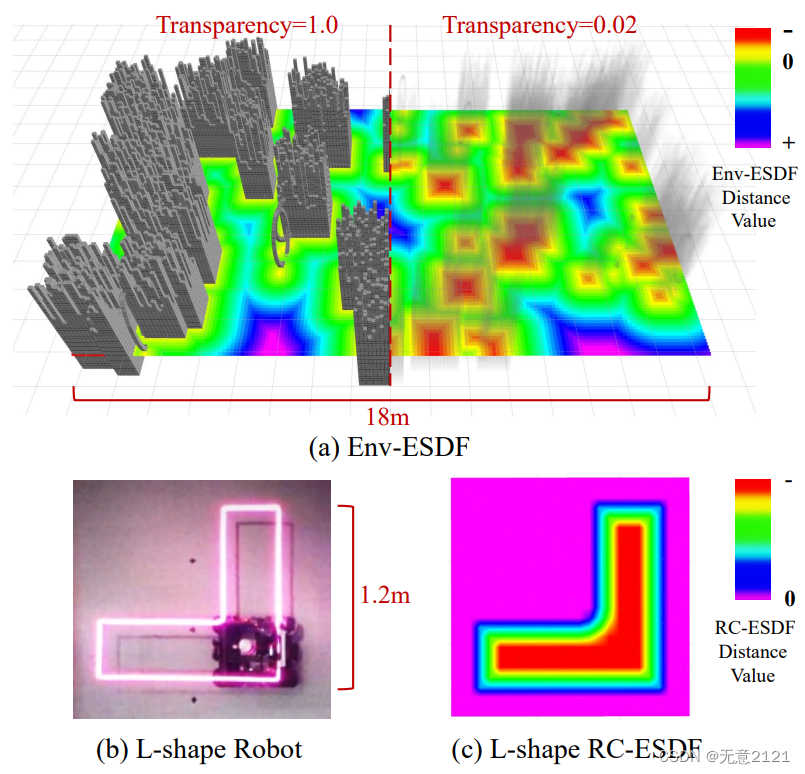
3. ESDF
Euclidean Signed Distance Functions,这是一种地图的形式,常用于无人机导航。它可以很方便地对障碍物进行距离和梯度信息的查询,对空中机器人的在线运动规划具有重要意义。
但ESDF不仅有针对于环境的也有针对机器人自身的,针对机器人自身的ESDF可以让任意形状的机器人的碰撞检测变得更加容易,感兴趣的可以阅读
文章来源:https://blog.csdn.net/weixin_65089713/article/details/135637809
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!