stable diffusion代码学习笔记
发布时间:2024年01月11日
前言:本文没有太多公式推理,只有一些简单的公式,以及公式和代码的对应关系。本文仅做个人学习笔记,如有理解错误的地方,请指出。
资源
- 本文学习的代码;
- 相关文献:
- Denoising Diffusion Probabilistic Models : DDPM,这个是必看的,推推公式
- Denoising Diffusion Implicit Models :DDIM,对 DDPM 的改进
- Pseudo Numerical Methods for Diffusion Models on Manifolds :PNMD/PLMS,对 DDPM 的改进
- High-Resolution Image Synthesis with Latent Diffusion Models :Latent-Diffusion,必看
- Neural Discrete Representation Learning : VQVAE,简单翻了翻,示意图非常形象,很容易了解其做法
前向过程(训练)
- 输入一张图片+随机噪声,训练unet,网络预测图片加上的噪声
反向过程(推理)
- 给个随机噪声,不断迭代去噪,输出一张图片
总体流程
- 输入的prompt经过clip encoder编码成(3+3,77,768)特征,正负prompt各3个,默认negative prompt为空‘’,解码时正的和负的latent图片用公式计算一下才是最终结果;time step通过linear层得到(3+3,1280)特征;把prompt和time ebedding和随机生成的图片放入unet,得到的就是我们要的图片。
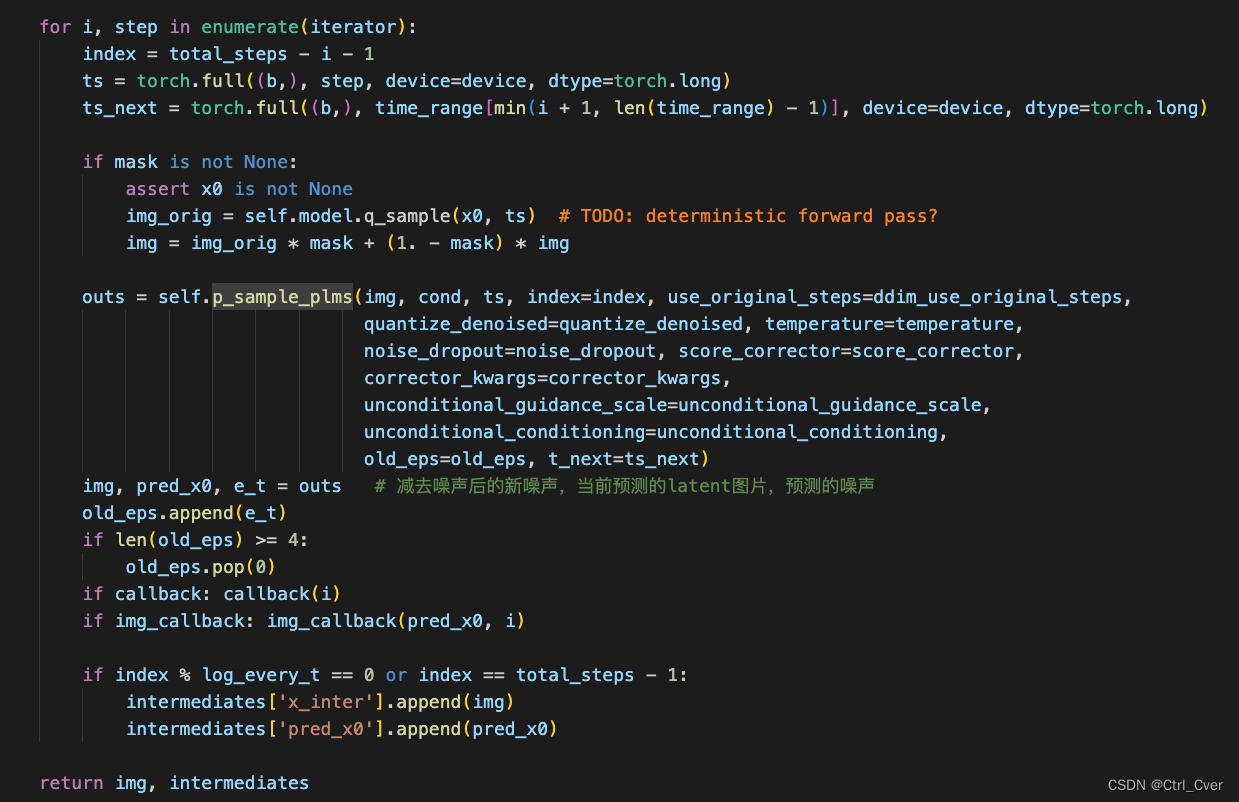
采样流程 text2img
- 该函数在PLMSSampler中,输入x(噪声,(3,4,64,64))-----c(输入的prompt,(3,77,768)----t (输入的time step,第几次去噪(3,)。把这三个东西输入unet,得到预测的噪声e_t。
def p_sample_plms(self, x, c, t, index, repeat_noise=False, use_original_steps=False, quantize_denoised=False,
temperature=1., noise_dropout=0., score_corrector=None, corrector_kwargs=None,
unconditional_guidance_scale=1., unconditional_conditioning=None, old_eps=None, t_next=None):
b, *_, device = *x.shape, x.device
def get_model_output(x, t):
if unconditional_conditioning is None or unconditional_guidance_scale == 1.:
e_t = self.model.apply_model(x, t, c)
else:
x_in = torch.cat([x] * 2)
t_in = torch.cat([t] * 2)
c_in = torch.cat([unconditional_conditioning, c]) # 积极消极的prompt,解码时按照公式减去消极prompt的图像
e_t_uncond, e_t = self.model.apply_model(x_in, t_in, c_in).chunk(2)
e_t = e_t_uncond + unconditional_guidance_scale * (e_t - e_t_uncond)
if score_corrector is not None:
assert self.model.parameterization == "eps"
e_t = score_corrector.modify_score(self.model, e_t, x, t, c, **corrector_kwargs)
return e_t
alphas = self.model.alphas_cumprod if use_original_steps else self.ddim_alphas
alphas_prev = self.model.alphas_cumprod_prev if use_original_steps else self.ddim_alphas_prev
sqrt_one_minus_alphas = self.model.sqrt_one_minus_alphas_cumprod if use_original_steps else self.ddim_sqrt_one_minus_alphas
sigmas = self.model.ddim_sigmas_for_original_num_steps if use_original_steps else self.ddim_sigmas
def get_x_prev_and_pred_x0(e_t, index):
# select parameters corresponding to the currently considered timestep
a_t = torch.full((b, 1, 1, 1), alphas[index], device=device)
a_prev = torch.full((b, 1, 1, 1), alphas_prev[index], device=device)
sigma_t = torch.full((b, 1, 1, 1), sigmas[index], device=device)
sqrt_one_minus_at = torch.full((b, 1, 1, 1), sqrt_one_minus_alphas[index],device=device)
# current prediction for x_0
pred_x0 = (x - sqrt_one_minus_at * e_t) / a_t.sqrt()
if quantize_denoised:
pred_x0, _, *_ = self.model.first_stage_model.quantize(pred_x0)
# direction pointing to x_t
dir_xt = (1. - a_prev - sigma_t**2).sqrt() * e_t
noise = sigma_t * noise_like(x.shape, device, repeat_noise) * temperature
if noise_dropout > 0.:
noise = torch.nn.functional.dropout(noise, p=noise_dropout)
x_prev = a_prev.sqrt() * pred_x0 + dir_xt + noise
return x_prev, pred_x0
e_t = get_model_output(x, t) # 模型预测的噪声
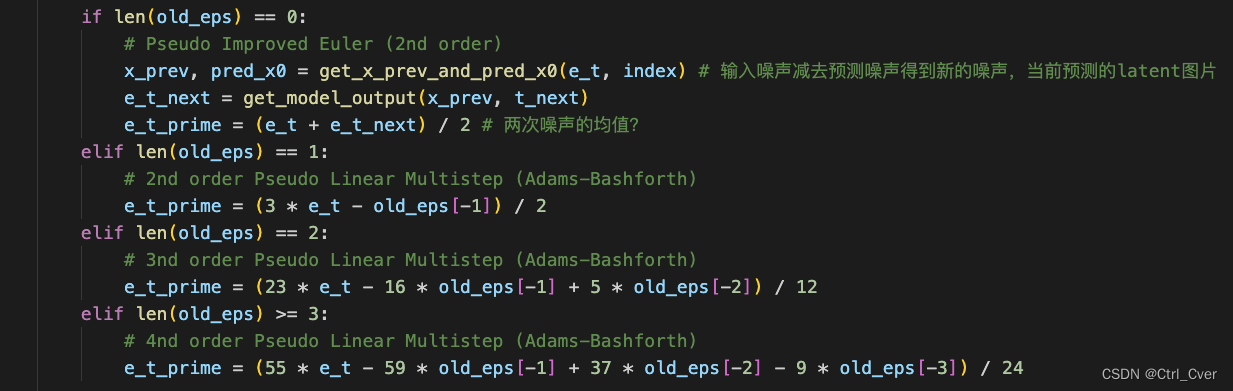
if len(old_eps) == 0:
# Pseudo Improved Euler (2nd order)
x_prev, pred_x0 = get_x_prev_and_pred_x0(e_t, index) # 输入噪声减去预测噪声得到新的噪声,当前预测的latent图片
e_t_next = get_model_output(x_prev, t_next)
e_t_prime = (e_t + e_t_next) / 2 # 两次噪声的均值?
elif len(old_eps) == 1:
# 2nd order Pseudo Linear Multistep (Adams-Bashforth)
e_t_prime = (3 * e_t - old_eps[-1]) / 2
elif len(old_eps) == 2:
# 3nd order Pseudo Linear Multistep (Adams-Bashforth)
e_t_prime = (23 * e_t - 16 * old_eps[-1] + 5 * old_eps[-2]) / 12
elif len(old_eps) >= 3:
# 4nd order Pseudo Linear Multistep (Adams-Bashforth)
e_t_prime = (55 * e_t - 59 * old_eps[-1] + 37 * old_eps[-2] - 9 * old_eps[-3]) / 24
x_prev, pred_x0 = get_x_prev_and_pred_x0(e_t_prime, index)
return x_prev, pred_x0, e_t
- 接下来看公式:
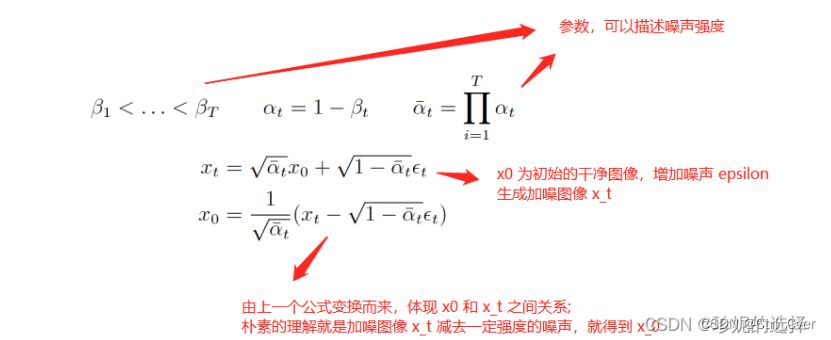
- 网络得到e_t后,进入到get_x_prev_and_pred_x0函数,可以看到
pred_x0 = (x - sqrt_one_minus_at * e_t) / a_t.sqrt()就是上述公式,也就是说网络的预测结果通过公式计算,我们可以得到预测的pred_x0原始图片和前一刻的噪声图像x_prev。
def get_x_prev_and_pred_x0(e_t, index):
# select parameters corresponding to the currently considered timestep
a_t = torch.full((b, 1, 1, 1), alphas[index], device=device)
a_prev = torch.full((b, 1, 1, 1), alphas_prev[index], device=device)
sigma_t = torch.full((b, 1, 1, 1), sigmas[index], device=device)
sqrt_one_minus_at = torch.full((b, 1, 1, 1), sqrt_one_minus_alphas[index],device=device)
# current prediction for x_0
pred_x0 = (x - sqrt_one_minus_at * e_t) / a_t.sqrt()
if quantize_denoised:
pred_x0, _, *_ = self.model.first_stage_model.quantize(pred_x0)
# direction pointing to x_t
dir_xt = (1. - a_prev - sigma_t**2).sqrt() * e_t
noise = sigma_t * noise_like(x.shape, device, repeat_noise) * temperature
if noise_dropout > 0.:
noise = torch.nn.functional.dropout(noise, p=noise_dropout)
x_prev = a_prev.sqrt() * pred_x0 + dir_xt + noise
return x_prev, pred_x0
-
前一刻的噪声图像的推理公式如图:


-
得到了上一刻的噪声图片x_prev后(也就是函数返回的img),继续迭代,最终生成需要的图片。
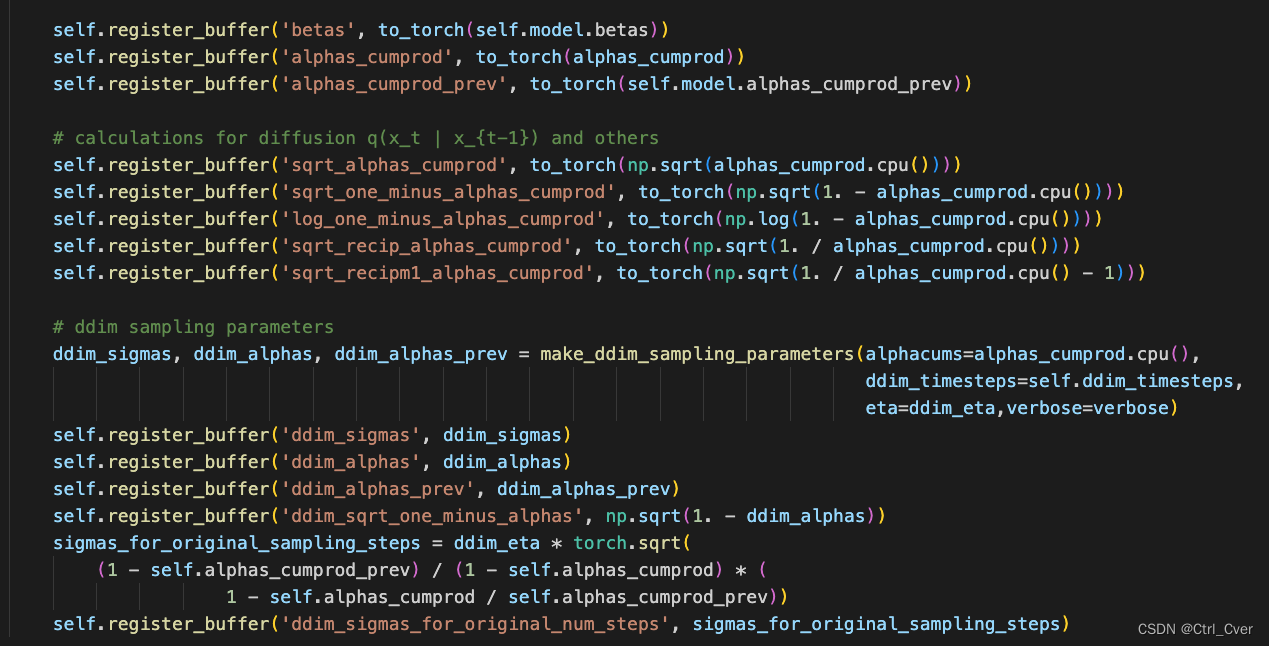
额外说明
这部分代码应该就是PLMS加速采样用的,论文中有公式推理
另外,还有一些参数是训练时候保存的,betas逐渐增大,用来控制噪声的强度。变量名解析 log_one_minus_alphas_cumprod其实就是log(1-alpha(右下角t)(头上直线)),没有带prev的都是当前时刻t,带prev的是前一时刻t-1。
参考文献:
https://blog.csdn.net/Eric_1993/article/details/129600524?spm=1001.2014.3001.5502
https://zhuanlan.zhihu.com/p/630354327
文章来源:https://blog.csdn.net/qq_33596242/article/details/135536013
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 当需要视频监控技术升级时,应该如何操作呢?
- Vulnhub靶机:Corrosion 2
- React查询、搜索类功能的实现
- 相机与镜头
- C语言中的作用域与储存期(包含局部变量、全局变量、auto、register、static、extern)
- CSS背景(详解)
- [Angular] 笔记 13:模板驱动表单 - 单选按钮
- 第十章 web入门
- 歌手朱卫明《只要陪着你》:歌中的陪伴与四季轮回
- 宠物救助上门喂养系统宠物领养宠物寄养寻宠小程序宠物社区系统宠物托运宠物殡葬源码