一起玩儿物联网人工智能小车(ESP32)——44. 利用红外测距模块GP2Y0E03实现避障小车
摘要:本文介绍使用红外测距模块GP2Y0E03实现避障小车
在前边已经介绍了两种非接触测距的办法,分别是超声波测距和激光测距,在这里,再介绍另一种常用的测距传感器——红外测距传感器。红外测距的工作原理是,利用红外信号与障碍物距离的不同反射强度也不同的原理,进行障碍物远近的检测。红外测距传感器具有一对红外信号发射与接收二极管,发射管发射特定频率的红外信号,接收管接收这种频率的红外信号,当红外的检测方向遇到障碍物时,红外信号反射回来被接收管接收,经过处理之后,通过数字传感器接口返回到检测设备,检测设备即可利用红外的返回信号来识别周围环境的变化。
本次使用的红外测距模块依然是使用的IIC总线通信协议,这个模块的测量范围是4~50厘米,用在避障小车上应该是足够了,但需要注意的是,当与被测物体距离小于4厘米时,红外模块可能会返回一个不正确的结果,因此在设计和使用这个红外测距模块的时候,要避免与被测物体的距离小于4厘米。另外需要注意的是,红外测距的一个缺点就是可能会受环境中的其他红外线的干扰,不适合阳光直射的地方,不过在室内使用的话问题不大。
下图就是这次使用的红外测距模块。

红外测距模块GP2Y0E03的特征如下:
- 内置信号处理电路的红外LED和CMOS图像传感器
- 测距范围:4到50厘米
- 低电压运行:最小2.7V
- 紧凑尺寸(16.7×11.0×5.2mm)
- 高精度测量
- 数字(IIC)/模拟输出类型
其引脚定义如下:
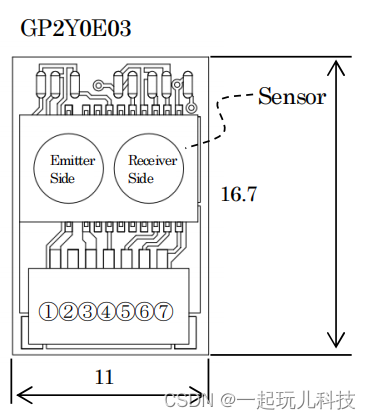
| 序号 | 标识 | 用途 |
| 1 | VDD | 电源正极。2.7V~5.5V |
| 2 | Vout(A) | 模拟电压输出 |
| 3 | GND | 电源负极。 |
| 4 | VIN(IO) | IO口供电电压 |
| 5 | GPIO1 | 片选信号输入端 |
| 6 | SCL | IIC时钟线 |
| 7 | SDA | IIC数据线 |
这个红外测距模块比之前的PCF8574模块要复杂一些,因此在使用IIC协议驱动红外测距仪进行测距操作时,也要复杂一些了。在GP2Y0E03内部有一系列的寄存器,这些寄存器用来保存着与外部设备相交互的数据,当外部设备需要读写某个寄存器的数据时,需要先发送该寄存器的地址,然后再接收或者发送数据。
在使用GP2Y0E03红外测距模块进行测量的时候,主要涉及到了以下几个寄存器。
| 地址 | 名称 | 寄存器有效位 | 缺省值 | 含义 |
| 0x35 | 移位数量 | [2:0] | 0x02 | 1:返回结果最大值128cm 2:返回结果最大值64cm |
| 0x5E | 测量距离[11:4] | [7:0] | 测量结果高位 | |
| 0x5F | 测量距离[3:0] | [3:0] | 测量结果低位 |
最后的测量距离为:(测量结果高位*16+测量结果低位)/16/2^n
其中n为移位数量。
在这里只是列举了与读取测量结果相关的几个寄存器,如果相看更多的寄存器,请参考官方的datasheet文档。
接下来就把这个红外测距模块与ESP32开发板连接到一起,具体的连接方法如下:
| 序号 | GP2Y0E03模块 | ESP32开发板模块 |
| 1 | VDD | +3.3V |
| 2 | Vout(A) | 空 |
| 3 | GND | GND |
| 4 | VIN(IO) | +3.3V |
| 5 | GPIO1 | +3.3V |
| 6 | SCL | P22 |
| 7 | SDA | P21 |
下面就打开“Arduino IDE”软件,看一下读取红外测距模块测量数据的详细程序。如下所示:
| #include?<Wire.h> int?distance = 0;?? ? ? ? ? ? ? ?// 保存测量结果? byte high, low = 0;?? ? ? ? ? ? ?// 测量结果的高位和低位 int?shift = 0;?? ? ? ? ? ? ? ? ? // 移位数量 #define?ADDRESS?? ? ? 0x40???// 测距模块IIC地址 #define?DISTANCE_REG??0x5E #define?SHIFT?? ? ? ? 0x35 void?setup() { ? // 初始化 ? Wire.begin(); ? Serial.begin(115200); ? ? delay(50);? ? ? // 读取移位寄存器的数值 ? Wire.beginTransmission(ADDRESS); ? ? ? Wire.write(SHIFT); ? Wire.endTransmission(); ? ? Wire.requestFrom(ADDRESS, 1); ? while(Wire.available()?== 0); ? shift = Wire.read(); } void?loop() { ? // 请求2个字节的测量结果 ? Wire.beginTransmission(ADDRESS); ? Wire.write(DISTANCE_REG); ? Wire.endTransmission(); ? ? Wire.requestFrom(ADDRESS, 2); ? ? while(Wire.available()?< 2); ? ? high = Wire.read(); ? low = Wire.read(); ? ? distance = (high * 16?+ low)/16/(int)pow(2,shift);?// 计算结果,单位厘米 ? ? Serial.print("距离是:"); ? Serial.print(distance); ? Serial.println("厘米"); ? ? delay(50); } |
在上面的程序中,每次读取GP02Y0E03红外测距模块寄存器内的数据之前,都要先发送多要读取的寄存器的地址,然后再请求相应的数据。
编译、上传程序,运行的结果如下:
好了,关于红外测距模块就介绍到这里了,你是不是可以把读取数据的代码封装到一个函数中,然后替换之前小车的测距函数,然后用红外测距模块实现自动避障功能了呢?
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Unity | Shader基础知识(第三集:案例<对材质颜色进行干预>)
- vue项目页面一闪一闪的问题解决办法(v-if闪屏、花括号闪屏)
- 掌握WPF控件:熟练常用属性(二)
- Stable-diffusion-webui本地部署和简要介绍
- 经典ABR算法介绍:Pensieve (SIGCOMM ‘17) 原理及训练指南
- SpringBoot应用开发的jar包,怎样在服务器重启情况下,自启动,从而实现远程无人值守
- windows+django+nginx部署静态资源文件
- 数据可视化?这些平台能处
- 基于SpringBoot的在线远程考试系统
- 最新揭秘!2024年六西格玛考试攻略—通关秘籍在此!