论文解读--Design of a Linear Non-uniform Antenna Array for a 77-GHz MIMO FMCW Radar
77GHz MIMO FMCW雷达线性非均匀天线阵列设计
摘要
????????本文介绍了一种用于77 GHz MIMO FMCW系统的线性非均匀天线阵列的设计和实现,该阵列可以同时估计目标的距离和角度位置。目标是在主波束宽度和旁瓣电平之间实现良好的权衡。非均匀间距加上MIMO原理,与具有相同数量元素的经典均匀半波长天线阵列相比,提供了优越的性能。然而,设计变得更加复杂,不能用分析方法来解决。从基本的阵列因素考虑出发,采用暴力、暴力和粒子群优化方法进行设计。实现了粒子群优化阵列。给出了仿真结果和测量结果,并进行了讨论。
1 介绍
????????到达方向(DOA)的估计是几十年来的一个热门话题,博大精深的教科书已经总结了这一领域的大量研究[1]。一种非常经典的方法是均匀半波长天线阵列。在其他因素中,它成功的最重要的原因可能是,在如何设计这样一个系统方面,存在着一些行之有效的程序。
????????对于非均匀天线配置,没有一种分析设计工具既简单易用,又能充分利用这些系统可能提供的全部性能。当采用多输入多输出(MIMO)雷达原理时,问题变得更加复杂。
????????首先介绍了现有的物理和数学问题。然后讨论了三种处理方法。解决这个问题的三种方法是:
? ? ? ? 1.暴力优化
? ? ? ? 2.逐步的暴力优化
? ? ? ? 3.粒子群算法(PSO)
????????根据所得到的阵列的性能和所需的计算消耗对优化技术进行了比较。实现了PSO得到的一种配置,并给出了测量结果。
2 现有的问题
A FMCW信号处理和阵列因子
?????? 目标是为调频连续波(FMCW)系统设计一个阵列。因此,我们考虑的起点必须是FMCW信号模型。例如,在[2]中介绍了一个简单的上调频chirp信号模型。作一些近似,单目标情况下随时间变化的中频信号模型可表示为
???????? ??(1)
??(1)
?????? 可以看出,时域频率ft与雷达目标的距离成正比。

图1由单一目标反射而产生的平面波
?????? 如图1所示,当目标在θ角位置反射产生的平面波撞击![]() 轴时,信号模型可扩展为时空相关模型。由于Δr(y)=y sin θ,与从原点看到的往返延迟时间(RTDT)相比,引入了额外的RTDT,并且在应用窄带近似后,它遵循
轴时,信号模型可扩展为时空相关模型。由于Δr(y)=y sin θ,与从原点看到的往返延迟时间(RTDT)相比,引入了额外的RTDT,并且在应用窄带近似后,它遵循
???????? ??(2)
??(2)
????????正如目标距离r与时间频率成正比一样,μy=sinθ与中频信号的空间频率fy成正比。离散傅里叶变换是寻找一个频率分量的正弦信号频率的最大似然方法,但它也很强大,通常用于具有多个频率分量的信号。对于数字信号处理,在应用任何处理之前,必须对信号进行采样和加窗。用天线阵列实现的连续空间信号也是如此。但是采样不一定是等距的,可以在位置![]() ,权重
,权重![]() 也是一个自由度。
也是一个自由度。
????????因此,阵列的几何形状![]() 和天线的权重
和天线的权重![]() 可以解释为应用于空间数据的窗函数。为了具有高分辨率并能够检测不同幅度的信号,窗函数的离散傅里叶变换需要达到峰值,并且在其最大值之外具有低电平,也称为旁瓣电平(SLL)。空间窗函数的傅里叶变换称为阵列因子(AF),由下式给出:
可以解释为应用于空间数据的窗函数。为了具有高分辨率并能够检测不同幅度的信号,窗函数的离散傅里叶变换需要达到峰值,并且在其最大值之外具有低电平,也称为旁瓣电平(SLL)。空间窗函数的傅里叶变换称为阵列因子(AF),由下式给出:
???????? ??(3)
??(3)
????????通常引入一个参数变换fy=-uyf0/c0。
???????? ??(4)
??(4)
????????从物理角度来看,只有![]() 会出现(可见区域),感兴趣的SLL区域仅限于
会出现(可见区域),感兴趣的SLL区域仅限于![]() 和
和![]() ([1])。这种距离限制作为一种口径掩盖了在
([1])。这种距离限制作为一种口径掩盖了在![]() 内允许的主波束。对于给定主波束口径宽度为θb的期望阵列,优化问题的数学公式可写成
内允许的主波束。对于给定主波束口径宽度为θb的期望阵列,优化问题的数学公式可写成
???????? ??(5)
??(5)
????????当在足够精细的离散μys值![]() 网格上求值时,这个问题可以用矩阵符号重写。
网格上求值时,这个问题可以用矩阵符号重写。
????????![]() ??(6)
??(6)
????????对于固定的设置![]() ,可以证明
,可以证明![]() 的优化符合凸优化领域,存在有效的优化算法[3]。
的优化符合凸优化领域,存在有效的优化算法[3]。
B MIMO原理
????????当阵列设置的N根天线不仅用于接收一个信号,而且单独用于发射和接收时,系统可以说是一个MIMO系统[4]。在我们的例子中,每次使用一个天线发送一个信号,而所有的天线分别用于接收一个信号。由于发射机的时间位移,可以区分不同发射机的接收信号。此方式获得N×N个测量。然而,如果目标处于静止状态,并且在无噪声情况下,则可以证明M=N(N + 1)=2个测量的最大数量是独立的。还有另一种解释这些M测量结果的方法:使用MIMO原理,N个真实天线的设置可以被解释为M个虚拟天线的阵列,其中只有第一个天线用于发送,所有M个天线用于接收。虚拟天线的位置![]() 可以计算为两个实际天线位置
可以计算为两个实际天线位置![]() 的所有可能组合的和。这个操作用
的所有可能组合的和。这个操作用![]() 表示。
表示。
C 最优化问题
????????利用对![]() 的优化问题可以有效求解,只剩下对
的优化问题可以有效求解,只剩下对![]() 的优化问题的结果,并结合MIMO雷达原理和虚拟天线的权重以
的优化问题的结果,并结合MIMO雷达原理和虚拟天线的权重以![]() 表示,(6)可以重新推导出整体优化问题的数学表达式。
表示,(6)可以重新推导出整体优化问题的数学表达式。
???????? ??(7)
??(7)
????????对于的![]() 外部优化,目前还没有有效的优化算法。在下一节中,介绍了处理这个问题的三种方法。
外部优化,目前还没有有效的优化算法。在下一节中,介绍了处理这个问题的三种方法。
3 三种设计方法
A 暴力优化
????????详尽地生成和评估所有可能的天线设置需要一些限制。为了避免天线离得太近,避免间距太大,也为了信号处理问题,单个天线之间的距离应限制为
????????![]() ??(8)
??(8)
????????其中1.7 mm≈λ/2,10mm≈3λ。这个集合有84个成员,蛮力方法的计算时间Tcalc为![]() 。
。
表1 暴力求解法近似时间消耗

?????? 表1显示了使用Matlab在典型的2 GHz, 2 GB RAM的个人计算机上对给定数量的实际天线N执行详尽搜索所需的时间量。可以得出的结论是,暴力求解仅对N≤4的天线配置有意义。对口径设置为umin=0.15的4元阵列进行了暴力优化,得到3dB波束宽度为±4:4°, SLL为-12.7 dB。它将被用作参考,并被称为“BF4el设计”。
B 逐步优化
????????逐步优化是基于暴力方法的,但试图处理可以生成和测试的配置数量有限的问题。它不是搜索所有N个天线的所有可能配置,而是从较少的天线数量开始,并在每一步中使用暴力优化增加一定数量的阵元,其中只有新天线的位置受到优化。图2显示了阵列是如何增长的,以及天线是如何在每一步中增加的。虽然这不是一个非常复杂的方法,但有许多论点支持这一观点:
????????任何时候,天线添加到现有的设置,整体性能将得到改善。表现不可能变得更糟。如果额外的天线不能提高性能,凸优化将设置新的(虚拟)天线的权重为零。
????????设l表示每一步增加的天线,则计算时间与其成正比
????????![]() ??(9)
??(9)
????????这是一个和N相关的线性算法复杂度。
????????与粒子群算法或遗传算法优化不同,可选择的参数数量非常有限,即每一步要增加的天线数量和每一步使用的口径由ρθb = umin=sinθb指定。此外,这些参数对结果数组性能的影响比必须提供给前一种方法的参数要直接和直观得多。

图2 一个线性阵列的逐步优化,每一步增加l=3个天线
????????从之前发现的BF4el设计开始进行优化,并使用不同的参数集进行优化。结果总结在表2中,图3和图4中有相关的阵列因子。他们建议,最好是一步优化尽可能多的天线。总的来说,结果看起来非常好,并且与4元阵列相比有了明显的巨大改进。
表2 不同优化设置逐步优化的结果

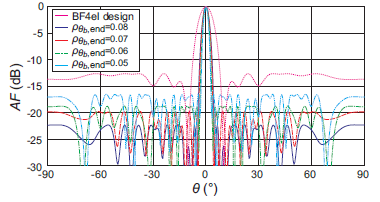
图3采用4步每步增加1个天线的逐步优化的结果

图4 采用2步每步增加2个天线的逐步优化的结果
C 粒子群优化
????????PSO是一种在搜索空间中寻找成本函数最优的搜索方法,其灵感来自于群体(如鸟群或鱼群)的社会行为。该算法已成功应用于大量的工程问题,详细的描述可以在[5]中找到。
????????为了在波束宽度和SLL之间实现良好的权衡,PSO以ρθb=0:06运行。得到的阵列因子如图5所示,相关的性能参数如表3所示。

图5 PSO优化的8元天线阵列的阵列因子
表3 粒子群优化天线阵列的天线间距和性能数值

4 实现
????????PSO优化阵列也在77 GHz系统中实现并使用,类似于[6]中提出的系统。图6显示了搭建的射频前端的照片。
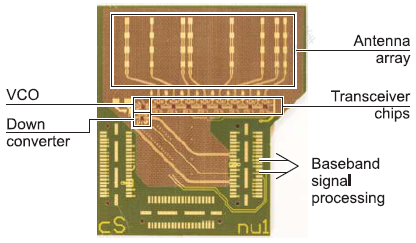
图6 77GHz FMCW系统PSO优化阵列的实现
????????该系统是为基带信号处理硬件而设计并插入的。图7显示了一张照片,其中测量设置与系统在一个可旋转的平台,一个角反作为目标。
????????测量结果如图8所示。角反的径向和角度位置都可以很好地识别,并且低SLL允许在同一距离内检测目标。

图7 测量设置的照片
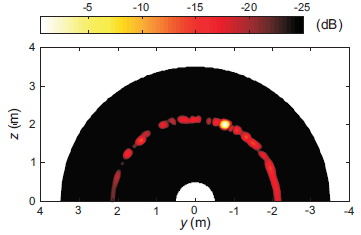
图8 在笛卡尔坐标系中绘制的中频信号的二维离散傅里叶变换的幅度
5 结论
????????采用两种不同的方法设计了77 Ghz MIMO FMCW雷达的线性8元非均匀天线阵列。虽然很简单,但逐步优化得到了非常乐观的结果,也可以与更先进的粒子群优化相竞争。不仅结果阵列的性能是正确的,而且计算量也是有竞争力的。实现了该阵列,并给出了应用结果。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!