ROS2 仿真教程 基于humble版本机器人安装
发布时间:2024年01月18日
安装colcon 编译工具
sudo apt install python3-colcon-common-extensions
安装cartographer建图
sudo apt install ros-humble-cartographer
sudo apt install ros-humble-cartographer-ros
安装导航包
sudo apt install ros-humble-navigation2
sudo apt install ros-humble-nav2-bringup
安装vcstool工具
sudo apt install python3-vcstool
gazebo ROS相关包安装
sudo apt install ros-humble-gazebo-ros*
ros2与turtlebot3仿真教程-安装turtlebot3
步骤:
安装git
sudo apt install git
下载编译
mkdir -p ~/tb3_ws/src
cd ~/tb3_ws
#humble版本
wget https://raw.githubusercontent.com/ROBOTIS-GIT/turtlebot3/humble-devel/turtlebot3.repos
vcs import src < turtlebot3.repos
colcon build --symlink-install
编译成功
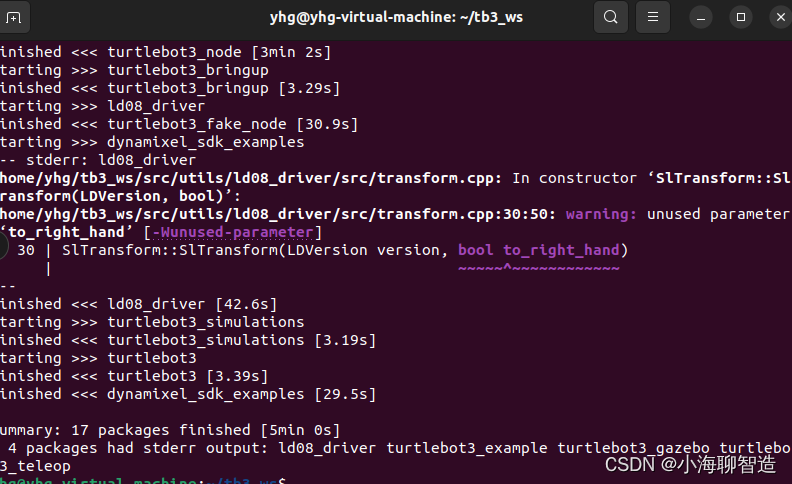
编译问题
删掉出错不影响使用然后编译就通过了
添加环境变量
echo 'source ~/tb3_ws/install/setup.bash' >> ~/.bashrc
echo 'export ROS_DOMAIN_ID=30 #TURTLEBOT3' >> ~/.bashrc
source ~/.bashrc
ros2与turtlebot3仿真教程-启动gazebo不同环境
文章来源:https://blog.csdn.net/hai411741962/article/details/135619608
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 回溯法解决染色问题(递归版和迭代版)
- 视频智能分析支持摄像头异常位移检测,监测摄像机异常位移变化,保障监控状态
- Leetcode—1185. 一周中的第几天【简单】
- RDD入门——RDD 代码
- 【MySQL】字符集与排序规则
- 解锁Mac的无限可能:Sensei for Mac - 你的全能系统优化清理助手
- Android 架构 - 组件化
- 智能亮灯拣货系统:提高效率、降低成本的未来仓储解决方案
- 单表查询 -- MySQL(3)
- 食品饮料加工厂需要哪些污水处理设备和工艺