第 5 课 编写简单的发布器 Publisher
发布时间:2024年01月14日
第 5 课 编写简单的发布器 Publisher
本节以创建一个velocity_publisher.py的(发布者)节点为例进行讲解。
- 输入指令“roscd beginner_hiwonder”,回车。进入beginner_hiwonder软件包。
- roscd:移动到指定的 ROS 功能包目录

- 输入指令“mkdir scripts”,回车。新建一个scripts目录存放Python脚本。

- 输入指令“cd scripts/”,回车。

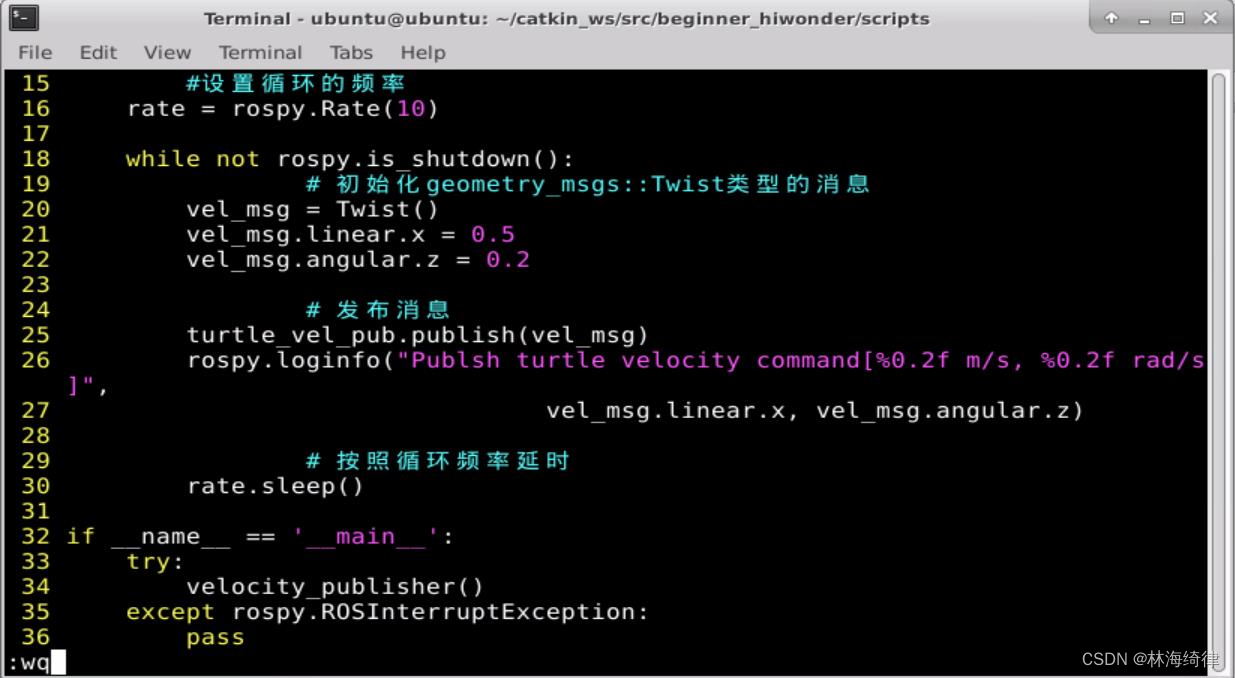
- 输入指令“vi velocity_publisher.py”编辑程序,复制下面程序。如需修改,再按下“i”即可修改。修改完成,按下“Esc”,输入“:wq”保存并退出。

#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 这是一个在ROS(机器人操作系统)环境中的Python脚本,用于发布控制指令来移动名为'turtle1'的仿真乌龟。
import rospy # 导入rospy模块,这是一个Python库,用于与ROS通信
from geometry_msgs.msg import Twist # 从geometry_msgs包导入Twist消息类型,用于设置速度
# 定义velocity_publisher函数:这是主要的发布者函数
def velocity_publisher():
# 初始化ROS节点,节点名为'velocity_publisher',anonymous=True可以确保你的节点有一个唯一的名字,防止节点名字冲突
rospy.init_node('velocity_publisher', anonymous=True)
# 创建一个Publisher对象,这个对象可以发布到'/turtle1/cmd_vel'话题,消息类型为Twist,队列长度设置为10
turtle_vel_pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)
# 设置循环频率为10Hz
rate = rospy.Rate(10)
# 在ROS没有被关闭的情况下,循环执行以下操作
while not rospy.is_shutdown():
# 创建一个Twist类型的消息对象vel_msg
vel_msg = Twist()
# 设置vel_msg的线速度为0.5米/秒,角速度为0.2弧度/秒
vel_msg.linear.x = 0.5
vel_msg.angular.z = 0.2
# 发布刚刚设置的速度消息,这会告诉乌龟开始移动
turtle_vel_pub.publish(vel_msg)
# 打印日志信息,显示当前发布的线速度和角速度
rospy.loginfo("Publish turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z)
# 根据上面设置的循环频率进行睡眠,确保有一致的发布速率
rate.sleep()
# Python的标准模板,当这个脚本被执行而不是被导入为模块时,下面的代码将会运行
if __name__ == '__main__':
try:
# 尝试执行velocity_publisher函数
velocity_publisher()
except rospy.ROSInterruptException:
# 如果捕获到ROSInterruptException异常,就忽略它(通常这意味着程序在rospy.signal_shutdown时被关闭)
pass
5) 输入指令“chmod +x velocity_publisher.py”回车,为保存的velocity_publisher.py赋予可执行权限。

6) 输入指令“roscore”回车,运行python文件之前,我们需要先打开节点管理器
- roscore:启动 ROS Master 节点管理器
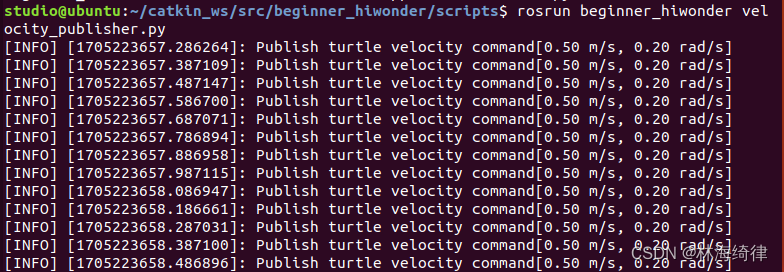
7) 输入指令“rosrun beginner_hiwonder velocity_publisher.py”回车,运行python文件,也可以使用python指令去运行
- rosrun:启动 ROS 节点
8) 输入指令“rostopic list”回车,查看现在发布的有哪些话题
- rostopic:确认 ROS 话题信息

9) 输入指令“rostopic echo /turtle1/cmd_vel”回车,查看话题信息
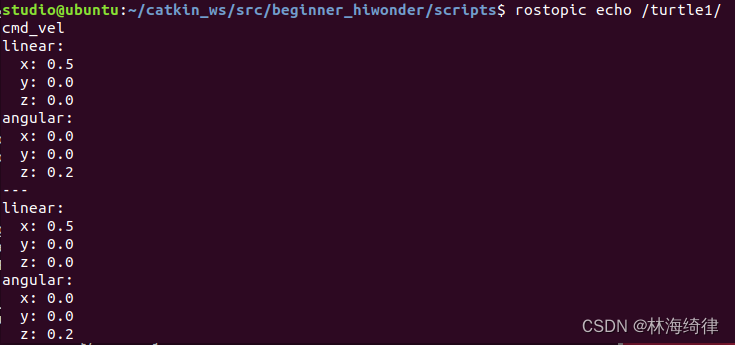
到此,发布器编辑完成。
文章来源:https://blog.csdn.net/m0_73841621/article/details/135585161
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 青少年CTF-qsnctf-Web-include01&include02(多种方法-知识点较多-建议收藏!)
- TensorRT英伟达官方示例解析(一)
- 自建数据库如何选择阿里云服务器配置?
- 【云上探索实验室】使用 Amazon Bedrock 体验构建Stable Diffusion-文本生成图像生成式 AI 应用
- 【DSP原理及应用】实验-A/D与D/A实验
- 微服务架构所面临的技术问题
- filecoin通过filutils 区块浏览器获取历史收益数据
- CF888G Xor-MST DFS 生成树 Trie
- Python 直观理解基尼系数
- ES6学习(四):promise的使用和实例方法