基于open3d的半径滤波
发布时间:2024年01月24日
概念原理
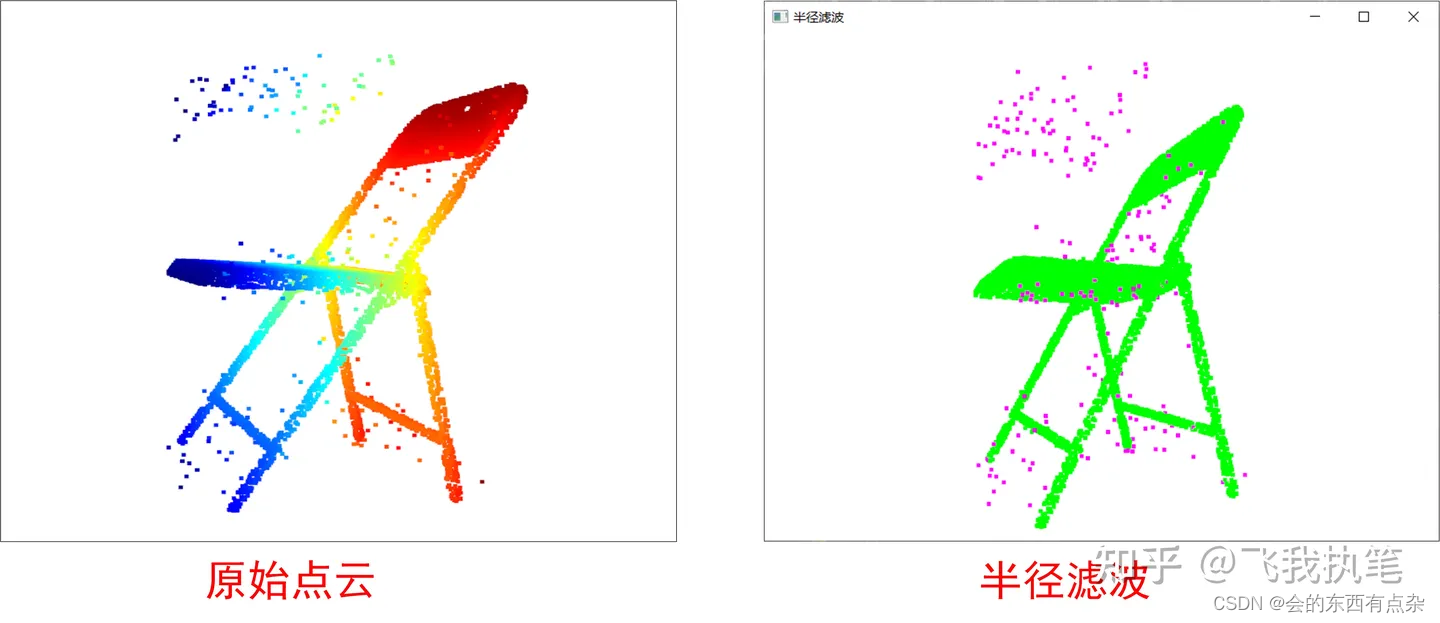
半径滤波器比较简单粗暴。以某点为中心画一个圆计算落在该圆中点的数量,当数量大于给定值时,则保留该点,数量小于给定值则剔除该点。此算法运行速度快,依序迭代留下的点一定是最密集的,但是圆的半径和圆内点的数目都需要人工指定;
radius_outlier_removal 实现半径滤波算法,移除给定球体中几乎没有邻居的点。需要两个参数:
- num_points,邻域球内的最少点数,低于该值的点为噪声点
- radius ,邻域半径的大小
示例代码
# @describe:可视化半径滤波后的结果点云和噪声点云
# @param:cloud,原始点云
# @param:ind,内点索引
def display_inlier_outlier(cloud, ind):
# 提取滤波后的结果点云
inlier_cloud = cloud.select_by_index(ind)
# 提取噪声点云
outlier_cloud = cloud.select_by_index(ind, invert=True)
# 结果展示
print("Showing outliers (red) and inliers (blue): ")
outlier_cloud.paint_uniform_color([1, 0, 0])
inlier_cloud.paint_uniform_color([0, 0, 1])
o3d.visualization.draw_geometries([inlier_cloud, outlier_cloud])结果图像
文章来源:https://blog.csdn.net/qq_20660115/article/details/135763507
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- C#,入门教程(13)——字符(char)及字符串(string)的基础知识
- Python开发环境安装:梦的起点
- 案例071:基于微信小程序的汽车预约维修系统
- 上位机图像处理和嵌入式模块部署(qt插件的使用)
- 如何将 Python 项目打包成 exe,另带卸载功能!
- Python使用selenium自动爬取苏宁易购商品数据
- 黑马程序员——javase基础——day05——面向对象基础
- 第十三届蓝桥杯大赛青少年国赛C++组编程题真题(2022年)
- 阿里云服务器2024年2核16G、4核32G、8核64G配置最新收费标准及活动价格
- 生产问题一:redis锁处理幂等性失效