YOLOv8改进 | 主干篇 | RevColV1可逆列网络(特征解耦助力小目标检测)
一、本文介绍
本文给大家带来的是主干网络RevColV1,翻译过来就是可逆列网络去发表于ICLR2022,其是一种新型的神经网络设计(和以前的网络结构的传播方式不太一样),由多个子网络(列)通过多级可逆连接组成。这种设计允许在前向传播过程中特征解耦,保持总信息无压缩或丢弃。其非常适合数据集庞大的目标检测任务,数据集数量越多其效果性能越好,亲测在包含1000个图片的数据集上其涨点效果就非常明显了,大家可以多动手尝试,其RevColV2的论文同时已经发布如果代码开源我也会第一时间给大家上传。
推荐指数:?????
涨点效果:?????
专栏回顾:YOLOv8改进系列专栏——本专栏持续复习各种顶会内容——科研必备????
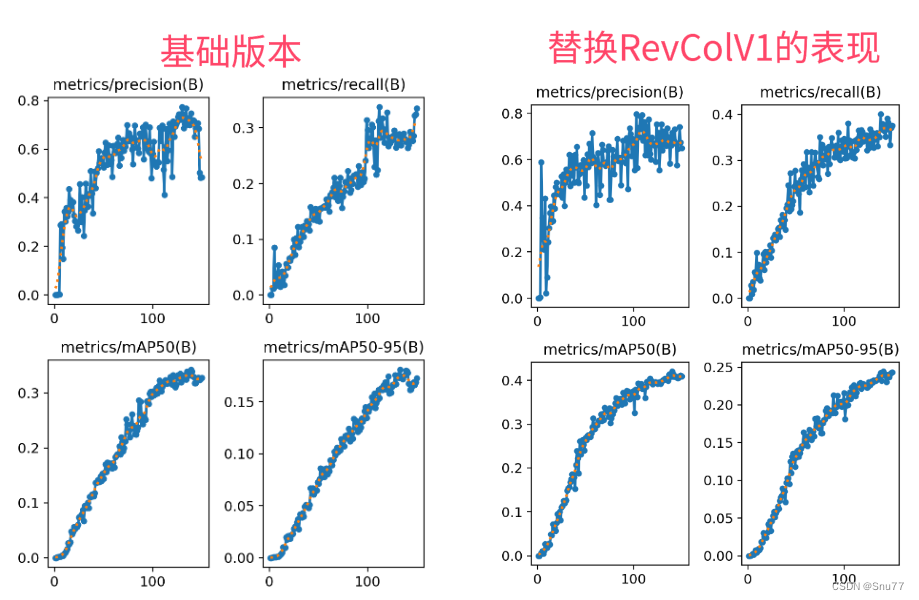
训练结果对比图->??
我这里数据集非常小只有不到一千张图片,同时我用的最微量的版本,涨点幅度还算可以,大家可以尝试其中比较高的版本,大家数据集的图片估计也多效果估计会有一个比较大的提升。
目录
二、RevColV1的框架原理
 ?
?
官方论文地址:?官方论文地址
官方代码地址:?官方代码地址
 ?
?
2.1 RevColV1的基本原理
RevCol的主要原理和思想是利用可逆连接来设计网络结构,允许信息在网络的不同分支(列)间自由流动而不丢失。这种多列结构在前向传播过程中逐渐解耦特征,并保持全部信息,而不是进行压缩或舍弃。这样的设计提高了网络在图像分类、对象检测和语义分割等计算机视觉任务中的表现,尤其是在参数量大和数据集大时。
RevCol的创新点我将其总结为以下几点:
1. 可逆连接设计:通过多个子网络(列)间的可逆连接,保证信息在前向传播过程中不丢失。
2. 特征解耦:在每个列中,特征逐渐被解耦,保持总信息而非压缩或舍弃。
3. 适用于大型数据集和参数:在大型数据集和高参数预算下表现出色。
4. 跨模型应用:可作为宏架构方式,应用于变换器或其他神经网络,改善计算机视觉和NLP任务的性能。
简单总结:RevCol通过其独特的多列结构和可逆连接设计,使得网络能够在处理信息时保持完整性,提高特征处理的效率。这种架构在数据丰富且复杂的情况下尤为有效,且可灵活应用于不同类型的神经网络模型中。
其中的创新点第四点不用叙述了,网络结构可以应用于我们的YOLOv8就是最好的印证。
 这是论文中的图片1,展示了传统单列网络(a)与RevCol(b)的信息传播对比。在图(a)中,信息通过一个接一个的层线性传播,每层处理后传递给下一层直至输出。而在图(b)中,RevCol通过多个并行列(Col 1 到 Col N)处理信息,其中可逆连接(蓝色曲线)允许信息在列间传递,保持低级别和语义级别的信息传播。这种结构有助于整个网络维持更丰富的信息,并且每个列都能从其他列中学习到信息,增强了特征的表达和网络的学习能力(但是这种做法导致模型的参数量非常巨大,而且训练速度缓慢计算量比较大)。
这是论文中的图片1,展示了传统单列网络(a)与RevCol(b)的信息传播对比。在图(a)中,信息通过一个接一个的层线性传播,每层处理后传递给下一层直至输出。而在图(b)中,RevCol通过多个并行列(Col 1 到 Col N)处理信息,其中可逆连接(蓝色曲线)允许信息在列间传递,保持低级别和语义级别的信息传播。这种结构有助于整个网络维持更丰富的信息,并且每个列都能从其他列中学习到信息,增强了特征的表达和网络的学习能力(但是这种做法导致模型的参数量非常巨大,而且训练速度缓慢计算量比较大)。
2.1.1?可逆连接设计
在RevCol中的可逆连接设计允许多个子网络(称为列)之间进行信息的双向流动。这意味着在前向传播的过程中,每一列都能接收到前一列的信息,并将自己的处理结果传递给下一列,同时能够保留传递过程中的所有信息。这种设计避免了在传统的深度网络中常见的信息丢失问题,特别是在网络层次较深时。因此,RevCol可以在深层网络中维持丰富的特征表示,从而提高了模型对数据的表示能力和学习效率。

这张图片展示了RevCol网络的不同组成部分和信息流动方式。
- 图 (a) 展示了RevNet中的一个可逆单元,标识了不同时间步长的状态。
- 图 (b) 展示了多级可逆单元,所有输入在不同级别上进行信息交换。
- 图 (c) 提供了整个可逆列网络架构的概览,其中包含了简化的多级可逆单元。
整个设计允许信息在网络的不同层级和列之间自由流动,而不会丢失任何信息,这对于深层网络的学习和特征提取是非常有益的(我觉得这里有点类似于Neck部分允许层级之间相互交流信息)。
2.1.2?特征解耦?
特征解耦是指在RevCol网络的每个子网络(列)中,特征通过可逆连接传递,同时独立地进行处理和学习。这样,每个列都能保持输入信息的完整性,而不会像传统的深度网络那样,在层与层之间传递时压缩或丢弃信息。随着信息在列中的前进,特征之间的关联性逐渐减弱(解耦),使得网络能够更细致地捕捉并强调重要的特征,这有助于提高模型在复杂任务上的性能和泛化能力。
?
这张图展示了RevCol网络的一个级别(Level l)的微观设计,以及特征融合模块(Fusion Block)的设计。在图(a)中,展示了ConvNeXt级别的标准结构,包括下采样块和残差块。图(b)中的RevCol级别包含了融合模块、残差块和可逆操作。这里的特征解耦是通过融合模块实现的,该模块接收相邻级别的特征图?, ?
作为输入,并将它们融合以生成新的特征表示。这样,不同级别的特征在融合过程中被解耦,每个级别维持其信息而不压缩或舍弃。图(c)详细描述了融合模块的内部结构,它通过上采样和下采样操作处理不同分辨率的特征图,然后将它们线性叠加,形成为ConvNeXt块提供的特征。这种设计让特征在不同分辨率间流动时进行有效融合。
2.2 RevColV1的表现
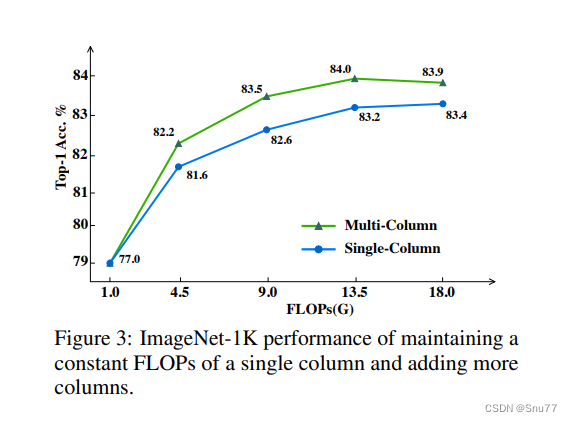
这张图片展示了伴随着FLOPs的增长TOP1的准确率情况,可以看出RevColV1伴随着FLOPs的增加效果逐渐明显。?
三、RevColV1的核心代码
下面的代码是RevColV1的全部代码,其中包含多个版本,但是大家需要注意这个模型训练非常耗时,参数量非常大,但是其特点就是参数量越大效果越好。其使用方式看章节四。
# --------------------------------------------------------
# Reversible Column Networks
# Copyright (c) 2022 Megvii Inc.
# Licensed under The Apache License 2.0 [see LICENSE for details]
# Written by Yuxuan Cai
# --------------------------------------------------------
from typing import Tuple, Any, List
from timm.models.layers import trunc_normal_
import torch
import torch.nn as nn
import torch.nn.functional as F
from timm.models.layers import DropPath
class UpSampleConvnext(nn.Module):
def __init__(self, ratio, inchannel, outchannel):
super().__init__()
self.ratio = ratio
self.channel_reschedule = nn.Sequential(
# LayerNorm(inchannel, eps=1e-6, data_format="channels_last"),
nn.Linear(inchannel, outchannel),
LayerNorm(outchannel, eps=1e-6, data_format="channels_last"))
self.upsample = nn.Upsample(scale_factor=2 ** ratio, mode='nearest')
def forward(self, x):
x = x.permute(0, 2, 3, 1)
x = self.channel_reschedule(x)
x = x = x.permute(0, 3, 1, 2)
return self.upsample(x)
class LayerNorm(nn.Module):
r""" LayerNorm that supports two data formats: channels_last (default) or channels_first.
The ordering of the dimensions in the inputs. channels_last corresponds to inputs with
shape (batch_size, height, width, channels) while channels_first corresponds to inputs
with shape (batch_size, channels, height, width).
"""
def __init__(self, normalized_shape, eps=1e-6, data_format="channels_first", elementwise_affine=True):
super().__init__()
self.elementwise_affine = elementwise_affine
if elementwise_affine:
self.weight = nn.Parameter(torch.ones(normalized_shape))
self.bias = nn.Parameter(torch.zeros(normalized_shape))
self.eps = eps
self.data_format = data_format
if self.data_format not in ["channels_last", "channels_first"]:
raise NotImplementedError
self.normalized_shape = (normalized_shape,)
def forward(self, x):
if self.data_format == "channels_last":
return F.layer_norm(x, self.normalized_shape, self.weight, self.bias, self.eps)
elif self.data_format == "channels_first":
u = x.mean(1, keepdim=True)
s = (x - u).pow(2).mean(1, keepdim=True)
x = (x - u) / torch.sqrt(s + self.eps)
if self.elementwise_affine:
x = self.weight[:, None, None] * x + self.bias[:, None, None]
return x
class ConvNextBlock(nn.Module):
r""" ConvNeXt Block. There are two equivalent implementations:
(1) DwConv -> LayerNorm (channels_first) -> 1x1 Conv -> GELU -> 1x1 Conv; all in (N, C, H, W)
(2) DwConv -> Permute to (N, H, W, C); LayerNorm (channels_last) -> Linear -> GELU -> Linear; Permute back
We use (2) as we find it slightly faster in PyTorch
Args:
dim (int): Number of input channels.
drop_path (float): Stochastic depth rate. Default: 0.0
layer_scale_init_value (float): Init value for Layer Scale. Default: 1e-6.
"""
def __init__(self, in_channel, hidden_dim, out_channel, kernel_size=3, layer_scale_init_value=1e-6, drop_path=0.0):
super().__init__()
self.dwconv = nn.Conv2d(in_channel, in_channel, kernel_size=kernel_size, padding=(kernel_size - 1) // 2,
groups=in_channel) # depthwise conv
self.norm = nn.LayerNorm(in_channel, eps=1e-6)
self.pwconv1 = nn.Linear(in_channel, hidden_dim) # pointwise/1x1 convs, implemented with linear layers
self.act = nn.GELU()
self.pwconv2 = nn.Linear(hidden_dim, out_channel)
self.gamma = nn.Parameter(layer_scale_init_value * torch.ones((out_channel)),
requires_grad=True) if layer_scale_init_value > 0 else None
self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
def forward(self, x):
input = x
x = self.dwconv(x)
x = x.permute(0, 2, 3, 1) # (N, C, H, W) -> (N, H, W, C)
x = self.norm(x)
x = self.pwconv1(x)
x = self.act(x)
# print(f"x min: {x.min()}, x max: {x.max()}, input min: {input.min()}, input max: {input.max()}, x mean: {x.mean()}, x var: {x.var()}, ratio: {torch.sum(x>8)/x.numel()}")
x = self.pwconv2(x)
if self.gamma is not None:
x = self.gamma * x
x = x.permute(0, 3, 1, 2) # (N, H, W, C) -> (N, C, H, W)
x = input + self.drop_path(x)
return x
class Decoder(nn.Module):
def __init__(self, depth=[2, 2, 2, 2], dim=[112, 72, 40, 24], block_type=None, kernel_size=3) -> None:
super().__init__()
self.depth = depth
self.dim = dim
self.block_type = block_type
self._build_decode_layer(dim, depth, kernel_size)
self.projback = nn.Sequential(
nn.Conv2d(
in_channels=dim[-1],
out_channels=4 ** 2 * 3, kernel_size=1),
nn.PixelShuffle(4),
)
def _build_decode_layer(self, dim, depth, kernel_size):
normal_layers = nn.ModuleList()
upsample_layers = nn.ModuleList()
proj_layers = nn.ModuleList()
norm_layer = LayerNorm
for i in range(1, len(dim)):
module = [self.block_type(dim[i], dim[i], dim[i], kernel_size) for _ in range(depth[i])]
normal_layers.append(nn.Sequential(*module))
upsample_layers.append(nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True))
proj_layers.append(nn.Sequential(
nn.Conv2d(dim[i - 1], dim[i], 1, 1),
norm_layer(dim[i]),
nn.GELU()
))
self.normal_layers = normal_layers
self.upsample_layers = upsample_layers
self.proj_layers = proj_layers
def _forward_stage(self, stage, x):
x = self.proj_layers[stage](x)
x = self.upsample_layers[stage](x)
return self.normal_layers[stage](x)
def forward(self, c3):
x = self._forward_stage(0, c3) # 14
x = self._forward_stage(1, x) # 28
x = self._forward_stage(2, x) # 56
x = self.projback(x)
return x
class SimDecoder(nn.Module):
def __init__(self, in_channel, encoder_stride) -> None:
super().__init__()
self.projback = nn.Sequential(
LayerNorm(in_channel),
nn.Conv2d(
in_channels=in_channel,
out_channels=encoder_stride ** 2 * 3, kernel_size=1),
nn.PixelShuffle(encoder_stride),
)
def forward(self, c3):
return self.projback(c3)
def get_gpu_states(fwd_gpu_devices) -> Tuple[List[int], List[torch.Tensor]]:
# This will not error out if "arg" is a CPU tensor or a non-tensor type because
# the conditionals short-circuit.
fwd_gpu_states = []
for device in fwd_gpu_devices:
with torch.cuda.device(device):
fwd_gpu_states.append(torch.cuda.get_rng_state())
return fwd_gpu_states
def get_gpu_device(*args):
fwd_gpu_devices = list(set(arg.get_device() for arg in args
if isinstance(arg, torch.Tensor) and arg.is_cuda))
return fwd_gpu_devices
def set_device_states(fwd_cpu_state, devices, states) -> None:
torch.set_rng_state(fwd_cpu_state)
for device, state in zip(devices, states):
with torch.cuda.device(device):
torch.cuda.set_rng_state(state)
def detach_and_grad(inputs: Tuple[Any, ...]) -> Tuple[torch.Tensor, ...]:
if isinstance(inputs, tuple):
out = []
for inp in inputs:
if not isinstance(inp, torch.Tensor):
out.append(inp)
continue
x = inp.detach()
x.requires_grad = True
out.append(x)
return tuple(out)
else:
raise RuntimeError(
"Only tuple of tensors is supported. Got Unsupported input type: ", type(inputs).__name__)
def get_cpu_and_gpu_states(gpu_devices):
return torch.get_rng_state(), get_gpu_states(gpu_devices)
class ReverseFunction(torch.autograd.Function):
@staticmethod
def forward(ctx, run_functions, alpha, *args):
l0, l1, l2, l3 = run_functions
alpha0, alpha1, alpha2, alpha3 = alpha
ctx.run_functions = run_functions
ctx.alpha = alpha
ctx.preserve_rng_state = True
ctx.gpu_autocast_kwargs = {"enabled": torch.is_autocast_enabled(),
"dtype": torch.get_autocast_gpu_dtype(),
"cache_enabled": torch.is_autocast_cache_enabled()}
ctx.cpu_autocast_kwargs = {"enabled": torch.is_autocast_cpu_enabled(),
"dtype": torch.get_autocast_cpu_dtype(),
"cache_enabled": torch.is_autocast_cache_enabled()}
assert len(args) == 5
[x, c0, c1, c2, c3] = args
if type(c0) == int:
ctx.first_col = True
else:
ctx.first_col = False
with torch.no_grad():
gpu_devices = get_gpu_device(*args)
ctx.gpu_devices = gpu_devices
ctx.cpu_states_0, ctx.gpu_states_0 = get_cpu_and_gpu_states(gpu_devices)
c0 = l0(x, c1) + c0 * alpha0
ctx.cpu_states_1, ctx.gpu_states_1 = get_cpu_and_gpu_states(gpu_devices)
c1 = l1(c0, c2) + c1 * alpha1
ctx.cpu_states_2, ctx.gpu_states_2 = get_cpu_and_gpu_states(gpu_devices)
c2 = l2(c1, c3) + c2 * alpha2
ctx.cpu_states_3, ctx.gpu_states_3 = get_cpu_and_gpu_states(gpu_devices)
c3 = l3(c2, None) + c3 * alpha3
ctx.save_for_backward(x, c0, c1, c2, c3)
return x, c0, c1, c2, c3
@staticmethod
def backward(ctx, *grad_outputs):
x, c0, c1, c2, c3 = ctx.saved_tensors
l0, l1, l2, l3 = ctx.run_functions
alpha0, alpha1, alpha2, alpha3 = ctx.alpha
gx_right, g0_right, g1_right, g2_right, g3_right = grad_outputs
(x, c0, c1, c2, c3) = detach_and_grad((x, c0, c1, c2, c3))
with torch.enable_grad(), \
torch.random.fork_rng(devices=ctx.gpu_devices, enabled=ctx.preserve_rng_state), \
torch.cuda.amp.autocast(**ctx.gpu_autocast_kwargs), \
torch.cpu.amp.autocast(**ctx.cpu_autocast_kwargs):
g3_up = g3_right
g3_left = g3_up * alpha3 ##shortcut
set_device_states(ctx.cpu_states_3, ctx.gpu_devices, ctx.gpu_states_3)
oup3 = l3(c2, None)
torch.autograd.backward(oup3, g3_up, retain_graph=True)
with torch.no_grad():
c3_left = (1 / alpha3) * (c3 - oup3) ## feature reverse
g2_up = g2_right + c2.grad
g2_left = g2_up * alpha2 ##shortcut
(c3_left,) = detach_and_grad((c3_left,))
set_device_states(ctx.cpu_states_2, ctx.gpu_devices, ctx.gpu_states_2)
oup2 = l2(c1, c3_left)
torch.autograd.backward(oup2, g2_up, retain_graph=True)
c3_left.requires_grad = False
cout3 = c3_left * alpha3 ##alpha3 update
torch.autograd.backward(cout3, g3_up)
with torch.no_grad():
c2_left = (1 / alpha2) * (c2 - oup2) ## feature reverse
g3_left = g3_left + c3_left.grad if c3_left.grad is not None else g3_left
g1_up = g1_right + c1.grad
g1_left = g1_up * alpha1 ##shortcut
(c2_left,) = detach_and_grad((c2_left,))
set_device_states(ctx.cpu_states_1, ctx.gpu_devices, ctx.gpu_states_1)
oup1 = l1(c0, c2_left)
torch.autograd.backward(oup1, g1_up, retain_graph=True)
c2_left.requires_grad = False
cout2 = c2_left * alpha2 ##alpha2 update
torch.autograd.backward(cout2, g2_up)
with torch.no_grad():
c1_left = (1 / alpha1) * (c1 - oup1) ## feature reverse
g0_up = g0_right + c0.grad
g0_left = g0_up * alpha0 ##shortcut
g2_left = g2_left + c2_left.grad if c2_left.grad is not None else g2_left ## Fusion
(c1_left,) = detach_and_grad((c1_left,))
set_device_states(ctx.cpu_states_0, ctx.gpu_devices, ctx.gpu_states_0)
oup0 = l0(x, c1_left)
torch.autograd.backward(oup0, g0_up, retain_graph=True)
c1_left.requires_grad = False
cout1 = c1_left * alpha1 ##alpha1 update
torch.autograd.backward(cout1, g1_up)
with torch.no_grad():
c0_left = (1 / alpha0) * (c0 - oup0) ## feature reverse
gx_up = x.grad ## Fusion
g1_left = g1_left + c1_left.grad if c1_left.grad is not None else g1_left ## Fusion
c0_left.requires_grad = False
cout0 = c0_left * alpha0 ##alpha0 update
torch.autograd.backward(cout0, g0_up)
if ctx.first_col:
return None, None, gx_up, None, None, None, None
else:
return None, None, gx_up, g0_left, g1_left, g2_left, g3_left
class Fusion(nn.Module):
def __init__(self, level, channels, first_col) -> None:
super().__init__()
self.level = level
self.first_col = first_col
self.down = nn.Sequential(
nn.Conv2d(channels[level - 1], channels[level], kernel_size=2, stride=2),
LayerNorm(channels[level], eps=1e-6, data_format="channels_first"),
) if level in [1, 2, 3] else nn.Identity()
if not first_col:
self.up = UpSampleConvnext(1, channels[level + 1], channels[level]) if level in [0, 1, 2] else nn.Identity()
def forward(self, *args):
c_down, c_up = args
if self.first_col:
x = self.down(c_down)
return x
if self.level == 3:
x = self.down(c_down)
else:
x = self.up(c_up) + self.down(c_down)
return x
class Level(nn.Module):
def __init__(self, level, channels, layers, kernel_size, first_col, dp_rate=0.0) -> None:
super().__init__()
countlayer = sum(layers[:level])
expansion = 4
self.fusion = Fusion(level, channels, first_col)
modules = [ConvNextBlock(channels[level], expansion * channels[level], channels[level], kernel_size=kernel_size,
layer_scale_init_value=1e-6, drop_path=dp_rate[countlayer + i]) for i in
range(layers[level])]
self.blocks = nn.Sequential(*modules)
def forward(self, *args):
x = self.fusion(*args)
x = self.blocks(x)
return x
class SubNet(nn.Module):
def __init__(self, channels, layers, kernel_size, first_col, dp_rates, save_memory) -> None:
super().__init__()
shortcut_scale_init_value = 0.5
self.save_memory = save_memory
self.alpha0 = nn.Parameter(shortcut_scale_init_value * torch.ones((1, channels[0], 1, 1)),
requires_grad=True) if shortcut_scale_init_value > 0 else None
self.alpha1 = nn.Parameter(shortcut_scale_init_value * torch.ones((1, channels[1], 1, 1)),
requires_grad=True) if shortcut_scale_init_value > 0 else None
self.alpha2 = nn.Parameter(shortcut_scale_init_value * torch.ones((1, channels[2], 1, 1)),
requires_grad=True) if shortcut_scale_init_value > 0 else None
self.alpha3 = nn.Parameter(shortcut_scale_init_value * torch.ones((1, channels[3], 1, 1)),
requires_grad=True) if shortcut_scale_init_value > 0 else None
self.level0 = Level(0, channels, layers, kernel_size, first_col, dp_rates)
self.level1 = Level(1, channels, layers, kernel_size, first_col, dp_rates)
self.level2 = Level(2, channels, layers, kernel_size, first_col, dp_rates)
self.level3 = Level(3, channels, layers, kernel_size, first_col, dp_rates)
def _forward_nonreverse(self, *args):
x, c0, c1, c2, c3 = args
c0 = (self.alpha0) * c0 + self.level0(x, c1)
c1 = (self.alpha1) * c1 + self.level1(c0, c2)
c2 = (self.alpha2) * c2 + self.level2(c1, c3)
c3 = (self.alpha3) * c3 + self.level3(c2, None)
return c0, c1, c2, c3
def _forward_reverse(self, *args):
local_funs = [self.level0, self.level1, self.level2, self.level3]
alpha = [self.alpha0, self.alpha1, self.alpha2, self.alpha3]
_, c0, c1, c2, c3 = ReverseFunction.apply(
local_funs, alpha, *args)
return c0, c1, c2, c3
def forward(self, *args):
self._clamp_abs(self.alpha0.data, 1e-3)
self._clamp_abs(self.alpha1.data, 1e-3)
self._clamp_abs(self.alpha2.data, 1e-3)
self._clamp_abs(self.alpha3.data, 1e-3)
if self.save_memory:
return self._forward_reverse(*args)
else:
return self._forward_nonreverse(*args)
def _clamp_abs(self, data, value):
with torch.no_grad():
sign = data.sign()
data.abs_().clamp_(value)
data *= sign
class Classifier(nn.Module):
def __init__(self, in_channels, num_classes):
super().__init__()
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.classifier = nn.Sequential(
nn.LayerNorm(in_channels, eps=1e-6), # final norm layer
nn.Linear(in_channels, num_classes),
)
def forward(self, x):
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.classifier(x)
return x
class FullNet(nn.Module):
def __init__(self, channels=[32, 64, 96, 128], layers=[2, 3, 6, 3], num_subnet=5, kernel_size=3, drop_path=0.0,
save_memory=True, inter_supv=True) -> None:
super().__init__()
self.num_subnet = num_subnet
self.inter_supv = inter_supv
self.channels = channels
self.layers = layers
self.stem = nn.Sequential(
nn.Conv2d(3, channels[0], kernel_size=4, stride=4),
LayerNorm(channels[0], eps=1e-6, data_format="channels_first")
)
dp_rate = [x.item() for x in torch.linspace(0, drop_path, sum(layers))]
for i in range(num_subnet):
first_col = True if i == 0 else False
self.add_module(f'subnet{str(i)}', SubNet(
channels, layers, kernel_size, first_col, dp_rates=dp_rate, save_memory=save_memory))
self.apply(self._init_weights)
self.width_list = [i.size(1) for i in self.forward(torch.randn(1, 3, 640, 640))]
def forward(self, x):
c0, c1, c2, c3 = 0, 0, 0, 0
x = self.stem(x)
for i in range(self.num_subnet):
c0, c1, c2, c3 = getattr(self, f'subnet{str(i)}')(x, c0, c1, c2, c3)
return [c0, c1, c2, c3]
def _init_weights(self, module):
if isinstance(module, nn.Conv2d):
trunc_normal_(module.weight, std=.02)
nn.init.constant_(module.bias, 0)
elif isinstance(module, nn.Linear):
trunc_normal_(module.weight, std=.02)
nn.init.constant_(module.bias, 0)
##-------------------------------------- Tiny -----------------------------------------
def revcol_tiny(save_memory=True, inter_supv=True, drop_path=0.1, kernel_size=3):
channels = [64, 128, 256, 512]
layers = [2, 2, 4, 2]
num_subnet = 4
return FullNet(channels, layers, num_subnet, drop_path=drop_path, save_memory=save_memory, inter_supv=inter_supv,
kernel_size=kernel_size)
##-------------------------------------- Small -----------------------------------------
def revcol_small(save_memory=True, inter_supv=True, drop_path=0.3, kernel_size=3):
channels = [64, 128, 256, 512]
layers = [2, 2, 4, 2]
num_subnet = 8
return FullNet(channels, layers, num_subnet, drop_path=drop_path, save_memory=save_memory, inter_supv=inter_supv,
kernel_size=kernel_size)
##-------------------------------------- Base -----------------------------------------
def revcol_base(save_memory=True, inter_supv=True, drop_path=0.4, kernel_size=3, head_init_scale=None):
channels = [72, 144, 288, 576]
layers = [1, 1, 3, 2]
num_subnet = 16
return FullNet(channels, layers, num_subnet, drop_path=drop_path, save_memory=save_memory, inter_supv=inter_supv, kernel_size=kernel_size)
##-------------------------------------- Large -----------------------------------------
def revcol_large(save_memory=True, inter_supv=True, drop_path=0.5, kernel_size=3, head_init_scale=None):
channels = [128, 256, 512, 1024]
layers = [1, 2, 6, 2]
num_subnet = 8
return FullNet(channels, layers, num_subnet, drop_path=drop_path, save_memory=save_memory, inter_supv=inter_supv, kernel_size=kernel_size)
##--------------------------------------Extra-Large -----------------------------------------
def revcol_xlarge(save_memory=True, inter_supv=True, drop_path=0.5, kernel_size=3, head_init_scale=None):
channels = [224, 448, 896, 1792]
layers = [1, 2, 6, 2]
num_subnet = 8
return FullNet(channels, layers, num_subnet, drop_path=drop_path, save_memory=save_memory, inter_supv=inter_supv, kernel_size=kernel_size)
# model = revcol_xlarge(True)
# # 示例输入
# input = torch.randn(64, 3, 224, 224)
# output = model(input)
#
# print(len(output))#torch.Size([3, 64, 224, 224])四、手把手教你添加RevColV1机制
这个主干的网络结构添加起来算是所有的改进机制里最麻烦的了,因为有一些网略结构可以用yaml文件搭建出来,有一些网络结构其中的一些细节根本没有办法用yaml文件去搭建,用yaml文件去搭建会损失一些细节部分(而且一个网络结构设计很多细节的结构修改方式都不一样,一个一个去修改大家难免会出错),所以这里让网络直接返回整个网络,然后修改部分 yolo代码以后就都以这种形式添加了,以后我提出的网络模型基本上都会通过这种方式修改,我也会进行一些模型细节改进。创新出新的网络结构大家直接拿来用就可以的。下面开始添加教程->
(同时每一个后面都有代码,大家拿来复制粘贴替换即可,但是要看好了不要复制粘贴替换多了)
修改一
我们复制网络结构代码到“ultralytics/nn/modules”目录下创建一个py文件复制粘贴进去 ,我这里起的名字是RevColV1。

?
修改二
找到如下的文件"ultralytics/nn/tasks.py" 在开始的部分导入我们的模型如下图。

from .modules.RevColV1 import revcol_tiny, revcol_base, revcol_xlarge, revcol_large, revcol_small修改三?
添加如下两行代码!!!
 ?
?
修改四
找到七百多行大概把具体看图片,按照图片来修改就行,添加红框内的部分,注意没有()只是函数名,我这里只添加了部分的版本,大家有兴趣这个RevColV1还有更多的版本可以添加,看我给的代码函数头即可。
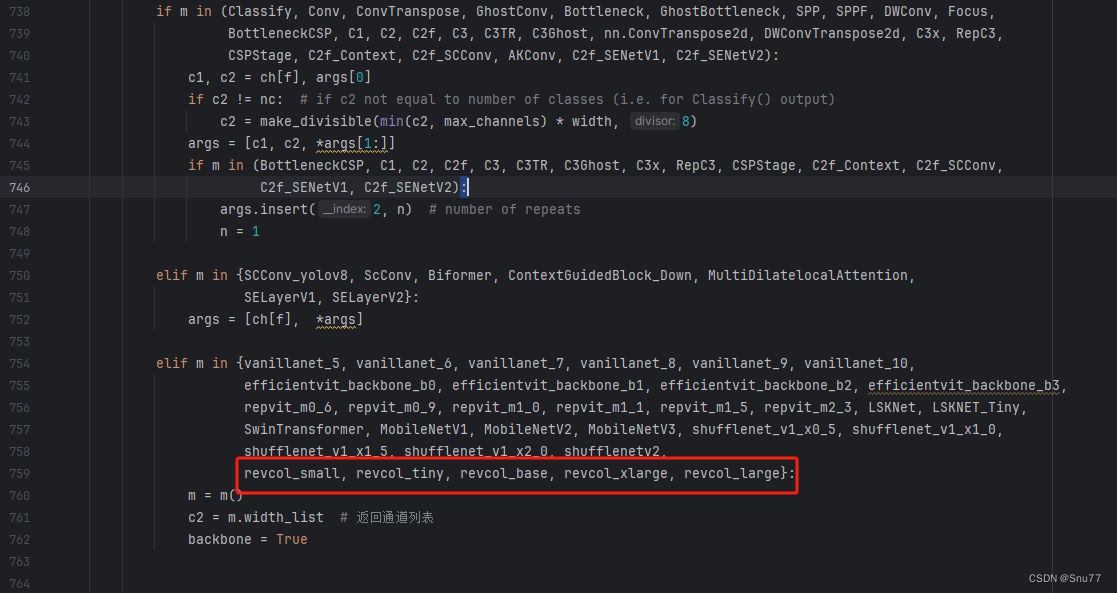
elif m in {自行添加对应的模型即可,下面都是一样的}:
m = m()
c2 = m.width_list # 返回通道列表
backbone = True修改五?
下面的两个红框内都是需要改动的。?
 ?
?
if isinstance(c2, list):
m_ = m
m_.backbone = True
else:
m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
t = str(m)[8:-2].replace('__main__.', '') # module type
m.np = sum(x.numel() for x in m_.parameters()) # number params
m_.i, m_.f, m_.type = i + 4 if backbone else i, f, t # attach index, 'from' index, type修改六?
如下的也需要修改,全部按照我的来。
 ?
?
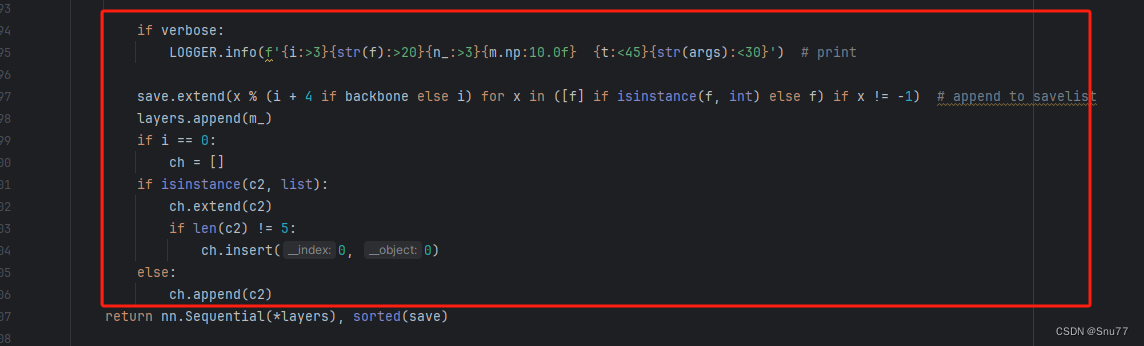
代码如下把原先的代码替换了即可。?
if verbose:
LOGGER.info(f'{i:>3}{str(f):>20}{n_:>3}{m.np:10.0f} {t:<45}{str(args):<30}') # print
save.extend(x % (i + 4 if backbone else i) for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelist
layers.append(m_)
if i == 0:
ch = []
if isinstance(c2, list):
ch.extend(c2)
if len(c2) != 5:
ch.insert(0, 0)
else:
ch.append(c2)修改七
修改七和前面的都不太一样,需要修改前向传播中的一个部分,?已经离开了parse_model方法了。
可以在图片中开代码行数,没有离开task.py文件都是同一个文件。 同时这个部分有好几个前向传播都很相似,大家不要看错了,是70多行左右的!!!,同时我后面提供了代码,大家直接复制粘贴即可,有时间我针对这里会出一个视频。
 ?
?
代码如下->
def _predict_once(self, x, profile=False, visualize=False):
"""
Perform a forward pass through the network.
Args:
x (torch.Tensor): The input tensor to the model.
profile (bool): Print the computation time of each layer if True, defaults to False.
visualize (bool): Save the feature maps of the model if True, defaults to False.
Returns:
(torch.Tensor): The last output of the model.
"""
y, dt = [], [] # outputs
for m in self.model:
if m.f != -1: # if not from previous layer
x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
if profile:
self._profile_one_layer(m, x, dt)
if hasattr(m, 'backbone'):
x = m(x)
if len(x) != 5: # 0 - 5
x.insert(0, None)
for index, i in enumerate(x):
if index in self.save:
y.append(i)
else:
y.append(None)
x = x[-1] # 最后一个输出传给下一层
else:
x = m(x) # run
y.append(x if m.i in self.save else None) # save output
if visualize:
feature_visualization(x, m.type, m.i, save_dir=visualize)
return x到这里就完成了修改部分,但是这里面细节很多,大家千万要注意不要替换多余的代码,导致报错,也不要拉下任何一部,都会导致运行失败,而且报错很难排查!!!很难排查!!!?
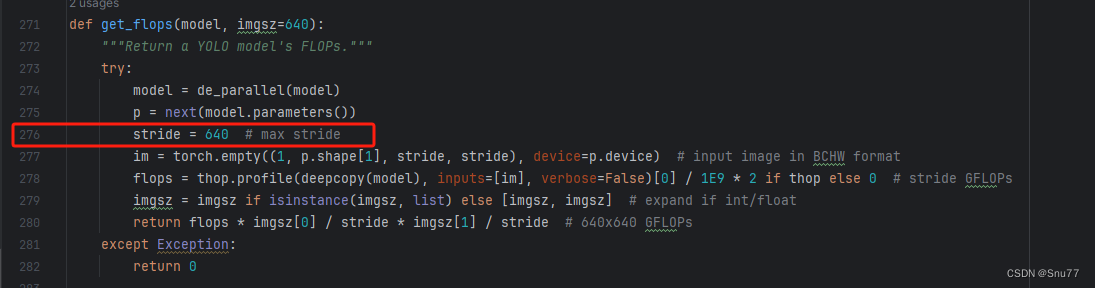
修改八
我们找到如下文件'ultralytics/utils/torch_utils.py'按照如下的图片进行修改,否则容易打印不出来计算量。
 ?
?
五、RevColV1的yaml文件
复制如下yaml文件进行运行!!!?
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOP
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, revcol_tiny, []] # 4
- [-1, 1, SPPF, [1024, 5]] # 5
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 6
- [[-1, 3], 1, Concat, [1]] # 7 cat backbone P4
- [-1, 3, C2f, [512]] # 8
- [-1, 1, nn.Upsample, [None, 2, 'nearest']] # 9
- [[-1, 2], 1, Concat, [1]] # 10 cat backbone P3
- [-1, 3, C2f, [256]] # 11 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]] # 12
- [[-1, 8], 1, Concat, [1]] # 13 cat head P4
- [-1, 3, C2f, [512]] # 14 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]] # 15
- [[-1, 5], 1, Concat, [1]] # 16 cat head P5
- [-1, 3, C2f, [1024]] # 17 (P5/32-large)
- [[11, 14, 17], 1, Detect, [nc]] # Detect(P3, P4, P5)
六、成功运行记录?
下面是成功运行的截图,已经完成了有1个epochs的训练,图片太大截不全第2个epochs了。?

?
七、本文总结
到此本文的正式分享内容就结束了,在这里给大家推荐我的YOLOv8改进有效涨点专栏,本专栏目前为新开的平均质量分98分,后期我会根据各种最新的前沿顶会进行论文复现,也会对一些老的改进机制进行补充,目前本专栏免费阅读(暂时,大家尽早关注不迷路~),如果大家觉得本文帮助到你了,订阅本专栏,关注后续更多的更新~
 ??
??
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Unity中Shader裁剪空间推导(在Shader中使用)
- 一文带你了解机器学习算法
- 【TensorRT】c++使用面向对象来封装tensorRT推理代码的指针释放问题
- 精品Nodejs实现的微信小程序的运动减肥管理系统设计与实现菜谱美食健康
- TortoiseSVN·文件锁定与清理
- 基于Java SSM框架实现音乐推荐网站项目【项目源码+论文说明】
- 【盛况回顾】聚焦流程创新,共话科技共赢:企业“流程三驾马车”闭环主题沙龙圆满落幕
- 2024年初级会计资格考试报名照片要求,千万不要直接上传哦
- Python实现线性混合效应回归模型(mixedlm算法)项目实战
- 15. 三数之和