最短路径问题相关算法、原理及适用场景
这里写目录标题
一、最短路径算法、原理及适用场景
深度优先搜索算法/广度优先搜索算法
从起始结点开始访问所有的深度遍历路径或广度优先路径,则到达终点结点的路径有多条,取其中路径权值最短的一条则为最短路径。
算法思想:
深度优先搜索算法(Depth First Search,简称DFS):一种用于遍历或搜索树或图的算法。沿着树的深度遍历树的节点,尽可能深的搜索树的分支。当节点v的所在边都己被探寻过或者在搜寻时结点不满足条件,搜索将回溯到发现节点v的那条边的起始节点。整个进程反复进行直到所有节点都被访问为止。属于盲目搜索,最糟糕的情况算法时间复杂度为
O
(
V
!
)
O(V!)
O(V!)。
应用场景:单源最短路径算法,不能求含负权边的图
深度优先搜索求解最短路问题完整代码:
import copy
import itertools
class DFS:
def __init__(self, graph):
self.adjacent_list = graph
def run(self, source, target):
# 深度优先搜索遍历,获取source-target的所有路径
path = []
paths = []
self.helper(source, target, path, paths)
# 返回最短路径,及距离
shortest_path = None
shortest_distance = 1 << 31
for path in paths:
distance = 0
for i, j in itertools.pairwise(path):
distance += self.get_distance(i, j)
if distance < shortest_distance:
shortest_distance = distance
shortest_path = path
return shortest_path, shortest_distance
def helper(self, source, target, path, paths):
current = source
path.append(current)
if current == target:
paths.append(copy.deepcopy(path))
path.remove(current)
return
neighbors = self.get_neighbors(current)
for neighbor in neighbors:
self.helper(neighbor, target, path, paths)
path.remove(current)
def get_neighbors(self, node):
neighbor_weight_list = self.adjacent_list[node]
neighbors = []
for neighbor, weight in neighbor_weight_list:
neighbors.append(neighbor)
return neighbors
def get_distance(self, i, j):
neighbor_weight_list = self.adjacent_list[i]
for neighbor, weight in neighbor_weight_list:
if neighbor == j:
return weight
return None
if __name__ == '__main__':
# 图的邻接矩阵表示
adjacent_list = {
0: [(1, 5), (2, 2)],
1: [(3, 1), (4, 6)],
2: [(3, 6), (5, 8)],
3: [(4, 1), (5, 2)],
4: [(6, 7)],
5: [(6, 3)],
6: []
}
dfs = DFS(adjacent_list)
print(dfs.run(source=0, target=6))
深度优先搜索图时,可以使用栈,效率更高。此外,不必遍历完所有路径再计算路径距离选出最短路,每次回溯时,若当前距离比已找到的路径距离更长,即可提前结束本次搜索。
Floyd算法(Floyd-Warshell算法)
多源最短路径算法(即一次性计算出所有点之间相互的最短距离),适用于任何图,不管有向无向,边权正负,但是最短路必须存在。(可以处理有负权边的情况,但无法处理负权环)
其思想是:两点之间的最短路径,要么是这两点直接相连,要么是通过某一点中转。如i到j点间的最短路,要么是i和j直接直接相连,要么通过i->k->j。因此floyd算法通过两个矩阵,distance记录任意两点之间的最短距离,sequence矩阵记录两点之间的中转点。对于任意的两点i和j,检查通过其他所有的点k,(
k
∈
V
?
{
i
,
j
}
k \in V -\{i,j\}
k∈V?{i,j}),是否距离更短,即若distance[i][k]+distance[k][j]<distance[i][j],则更新distance[i][j]=distance[i][k]+distance[k][j],并记录sequence[i][j]=k。
时间复杂度: O ( V 3 ) O(V^3) O(V3)(三层for循环)
import collections
import numpy as np
def floyd_warshall(adjacent_list, source=0, target=6):
node_list = adjacent_list.keys()
distance = np.empty(shape=(len(node_list), len(node_list)), )
sequence = collections.defaultdict(int)
distance.fill(np.inf)
for i in range(distance.shape[0]):
distance[i][i] = 0
for i, j_weight_list in adjacent_list.items():
for j, weight in j_weight_list:
distance[i][j] = weight
for i in node_list:
for j in node_list:
for k in node_list:
if distance[i][k] + distance[k][j] < distance[i][j]:
distance[i][j] = distance[i][k] + distance[k][j]
sequence[i, j] = k
print(distance)
print(sequence)
path = [target]
mid = sequence.get((source, target))
path.append(mid)
while True:
mid = sequence.get((source, mid), source)
path.append(mid)
if mid == source:
break
path.reverse()
return path
if __name__ == '__main__':
# 图的邻接矩阵表示
adjacent_list = {
0: [(1, 5), (2, 2)],
1: [(3, 1), (4, 6)],
2: [(3, 6), (5, 8)],
3: [(4, 1), (5, 2)],
4: [(6, 7)],
5: [(6, 3)],
6: []
}
print(floyd_warshall(adjacent_list, source=0, target=6))
Dijkstra算法
单源最短路径算法(只能计算出某个点到其他点的最短距离),无法处理存在负权边的情况,不能求含负权边的图
- 时间复杂度:
- 用数组来储存每个节点 O ( V 2 ) \text O(V^2) O(V2)
- 一个普通优先级队列 O ( ( V + E ) lg ? V ) \text O((V+E)\lg V) O((V+E)lgV)
- 用斐波那契堆实现的优先级队列 O ( ( V + E ) lg ? V ) \text O((V+E)\lg V) O((V+E)lgV)
import numpy as np
inf = np.inf
def dijkstra(graph, source, target):
permanent = {source: 0} # 永久标号,记录了每个点的最短距离
temporary = {} # 临时标号
sequence = {} # 记录每个顶点的最优前驱节点,用于记录最短路
nodes = graph.keys() # 顶点集合
# 初始化
for node in nodes:
if node != source:
temporary[node] = inf
current_node = source
while temporary: # 若临时标号集合不为空,算法继续
neighbor_weight_list = graph[current_node]
for n, w in neighbor_weight_list:
if permanent[current_node] + w < temporary[n]:
temporary[n] = permanent[current_node] + w
sequence[n] = current_node
min_key = None
min_val = 1e6
for k, v in temporary.items():
if v < min_val:
min_val = v
min_key = k
temporary.pop(min_key)
permanent[min_key] = min_val
current_node = min_key
# 从sequence中获取最短路
current = target
path = [target]
while True:
mid = sequence[current]
path.append(mid)
current = mid
if mid == source: break
path.reverse()
# 返回最短路及距离
return path, permanent[target]
if __name__ == "__main__":
# 有向图的邻接表,点:【(临界点,权值),(邻接点,权值)】
graph = {
0: [(1, 5), (2, 2)],
1: [(3, 1), (4, 6)],
2: [(3, 6), (5, 8)],
3: [(4, 1), (5, 2)],
4: [(6, 7)],
5: [(6, 3)],
6: []
}
# 打印最短路径
print(dijkstra(graph, 0, 6))
输出结果为:
([0, 1, 3, 5, 6], 11)
A*算法
Dijkstra算法和Floyd算法均为动态规划算法且是一种贪心算法,即进行无方向性的搜索,每一步转移都由计算机选择当前的最优解并生成新的状态,一直到达目标状态为止。由于其满足最优子结构性质,因此求出的最短路径序列的子序列也是最短路径,能够保证解为全局最优解。但当节点数量过大的时候,计算量也是无法接受的,由此诞生了A*算法。
贝尔曼福特算法(Bellman-Ford Algorithm)
单源最短路算法,不能处理含负权环的情况
时间复杂度: O ( V E ) \text O(VE) O(VE),显然不如dijkstra快
输入:图和起点source
输出:从source到其他所有顶点的最短距离。【注】如果有负权回路,则不计算该最短距离,没有意义,因为可以穿越负权回路任意次,则最终为负无穷。
- step1. 初始化:source到自身的距离=0,到其他顶点的距离为正无穷 d i s t [ v ] ← inf ? , d i s t [ s ] ← 0 dist[v]←\inf, dist[s]←0 dist[v]←inf,dist[s]←0
- step2. 迭代求解:反复对边集E中的每条边进行松弛操作,使得顶点集V中的每个顶点v的最短距离估计值逐步逼近其最短距离;(运行
∣
V
∣
?
1
|V|-1
∣V∣?1次,因为以source为起点的树的最大深度为
∣
V
∣
?
1
|V|-1
∣V∣?1)
【注】松弛操作:对于边(i,j)起点到j的距离>起点到i的距离+边(i,j)的权重,则更新起点到j的距离。# 松弛操作: if distance[to_node] > distance[from_node] + weight: distance[to_node] = distance[from_node] + weight - step3. 检验负权回路:判断边集E中的每一条边的两个端点是否收敛。如果存在未收敛的顶点,则算法返回false,表明问题无解;否则算法返回true,并且从源点可达的顶点v的最短距离保存在 dist[v]中。
import numpy as np
def bellman_ford(adjacent_list, source, target):
node_list = adjacent_list.keys()
edge_weight = {}
sequence = {}
for i, j_weight_list in adjacent_list.items():
for j, weight in j_weight_list:
edge_weight[i, j] = weight
distance = [0 if v == source else np.inf for v in node_list] # 记录起点-所有点的最短距离
for v in range(len(node_list) - 1):
for (from_node, to_node), weight in edge_weight.items():
if distance[to_node] > distance[from_node] + weight:
distance[to_node] = distance[from_node] + weight
sequence[to_node] = from_node
# 从sequence中获取最短路
current = target
path = [target]
while True:
mid = sequence[current]
path.append(mid)
current = mid
if mid == source: break
path.reverse()
# 返回最短路及距离
return path, distance[target]
if __name__ == '__main__':
# 图的邻接矩阵表示
adjacent_list = {
0: [(1, 5), (2, 2)],
1: [(3, 1), (4, 6)],
2: [(3, 6), (5, 8)],
3: [(4, 1), (5, 2)],
4: [(6, 7)],
5: [(6, 3)],
6: []
}
print(bellman_ford(adjacent_list, source=0, target=6))
([0, 1, 3, 5, 6], 11)
参考:
SPFA算法(Shortest Path Faster Algorithm)
Bellman—Ford算法的队列优化还有一个名字叫做SPFA。
算法应用场景
- 确定起点的最短路径问题:即已知起始结点,求最短路径的问题。适合使用Dijkstra算法。
- 确定终点的最短路径问题:与确定起点的问题相反,该问题是已知终结结点,求最短路径的问题。在无向图中该问题与确定起点的问题完全等同,在有向图中该问题等同于把所有路径方向反转的确定起点的问题。
- 确定起点终点的最短路径问题:即已知起点和终点,求两点之间的最短路径。
- 全局最短路径问题:求图中所有的最短路径。适合使用Floyd-Warshall算法。
二、k最短路径问题(K-Shortest Path Problem)
因为应用场景的多样性和复杂性,在路径规划问题中,业务人员不仅想要知道最短路径,还想知道次短路径。比如在地图导航应用中,用户往往想获取最短的几种行程方案,也许耗时最短的方案可能价格昂贵,或者需要用户进行多次换乘,而次短的方案可能更实惠,或者可以直达目的地,提供多条最优线路可以让用户能够根据自己额外的需求(比如时间、费用和舒适度)来做出权衡和决策。
基于这样的应用场景,1959年,Hoffman和Pavley首次提出了K-最短路问题,多年来一直受到业界的广泛关注,虽然现在已经出现了不少求解算法,但还没有一个算法像Dijkstra最短路算法那样得到广泛的认可。一个原因是因为应用场景的多样性和复杂性,还没有什么通用的K-最短路算法在所有场景下都表现良好,因此K-最短路算法仍有很大的优化空间。
基于Yen算法的k最短路径问题
Jin Y.Yen在1971年发表了求解K-最短路问题的Yen算法,Yen算法以Dijkstra算法为基础,采用了递推法中的偏离路径的算法思想来逐一求解前K条最短路,适用于计算非负权边的有向无环图中的单源K-最短路。networkx中Yen算法使用如下:
import networkx
def find_k_shortest_paths(source, target, k=3):
return list(islice(networkx.shortest_simple_paths(graph, source, target), k))
Yen算法的优点是易于理解,可以准确地找到图中任意两节点间的k条最短路径,缺点是时间复杂度较高,时间代价较大,主要原因是在求 P i + 1 P_{i+1} Pi+1?时,要将 P i P_i Pi?上除了终止节点外的所有节点都视为偏离节点,从而在选择偏离节点发展候选路径时占用了大量的时间。
为提高运行速度,后人在此算法的基础上不断改进和发展。比较有效的算法之一是马丁斯(Martins)在1999年提出的MPS算法,其特点是简化了偏离路径的长度计算,在生成候选边时不像Yen算法那样计算每条候选路径的长度,而是要求更新每条弧上的减少长度,只选择长度减少最小的弧作为最短偏离路径,该算法在一般情况下可以提高运行速度,但是在最差的情况下与Yen算法的时间复杂度一样。
- 付媛,朱礼军,韩红旗.K最短路径算法与应用分析[J].情报工程, 2015, 1(1):8.DOI:CNKI:SUN:QBGC.0.2015-01-018.
- K Shortest Path Routing
- networkx中shortest_simple_paths方法介绍
- networkX-04-查找k短路
- 前K条最短路径算法
- 最短路径分析之两点之间的k条最短路径
- 偏离点、偏离边及偏离路径介绍
三、Networkx中最短路算法使用
导入networkx库
import matplotlib.pyplot as plt
import networkx
数据准备
# 图的邻接矩阵表示
graph_adjacent_list = {
0: [(1, 5), (2, 2)],
1: [(3, 1), (4, 6)],
2: [(3, 6), (5, 8)],
3: [(4, 1), (5, 2)],
4: [(6, 7)],
5: [(6, 3)],
6: []
}
# 节点及坐标
node_coordinate = {
0: (0, 3),
1: (1.5, 1.5),
2: (2, 4),
3: (3.5, 3),
4: (4.5, 1),
5: (4.5, 4.5),
6: (6.5, 3)
}
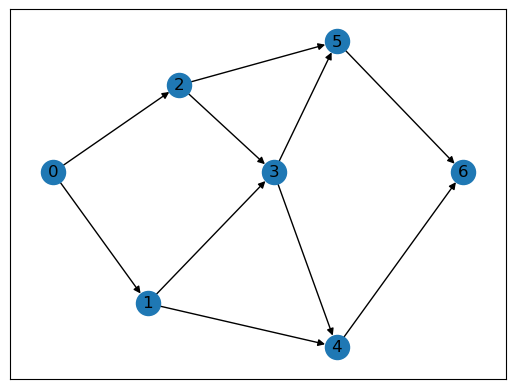
创建有向图
# 创建有向图
graph = networkx.DiGraph()
# 添加节点到graph
graph.add_nodes_from(graph_adjacent_list.keys())
# 添加边和权重到graph
src_tgt_weight_list = [(src, tgt, weight) for src, tgt_weight_list in graph_adjacent_list.items() for tgt, weight in tgt_weight_list]
graph.add_weighted_edges_from(src_tgt_weight_list)
# 图形可视化
networkx.draw_networkx(graph, pos=node_coordinate, with_labels=True, alpha=1, )
Floyd算法(Floyd-Warshell算法),Floyd算法, 返回每个点到其他所有点的最短距离
for k, v in networkx.floyd_warshall(graph, weight="weight").items():
print(k, v)
0 defaultdict(<function floyd_warshall_predecessor_and_distance.<locals>.<lambda>.<locals>.<lambda> at 0x000001DFB3772AC0>, {0: 0, 1: 5, 2: 2, 3: 6, 4: 7, 5: 8, 6: 11})
1 defaultdict(<function floyd_warshall_predecessor_and_distance.<locals>.<lambda>.<locals>.<lambda> at 0x000001DFB3FF8E00>, {1: 0, 3: 1, 4: 2, 0: inf, 2: inf, 5: 3, 6: 6})
2 defaultdict(<function floyd_warshall_predecessor_and_distance.<locals>.<lambda>.<locals>.<lambda> at 0x000001DFB3FF8F40>, {2: 0, 3: 6, 5: 8, 0: inf, 1: inf, 4: 7, 6: 11})
3 defaultdict(<function floyd_warshall_predecessor_and_distance.<locals>.<lambda>.<locals>.<lambda> at 0x000001DFB3FF9080>, {3: 0, 4: 1, 5: 2, 0: inf, 1: inf, 2: inf, 6: 5})
4 defaultdict(<function floyd_warshall_predecessor_and_distance.<locals>.<lambda>.<locals>.<lambda> at 0x000001DFB3FF91C0>, {4: 0, 6: 7, 0: inf, 1: inf, 2: inf, 3: inf, 5: inf})
5 defaultdict(<function floyd_warshall_predecessor_and_distance.<locals>.<lambda>.<locals>.<lambda> at 0x000001DFB3FF9300>, {5: 0, 6: 3, 0: inf, 1: inf, 2: inf, 3: inf, 4: inf})
6 defaultdict(<function floyd_warshall_predecessor_and_distance.<locals>.<lambda>.<locals>.<lambda> at 0x000001DFB3FF93A0>, {6: 0, 0: inf, 1: inf, 2: inf, 3: inf, 4: inf, 5: inf})
# 使用networkx中的dijkstra算法,查找最短路径
networkx.dijkstra_path(graph, source=0, target=6, weight='weight')
[0, 1, 3, 5, 6]
# 使用networkx中的bellman-ford算法,查找最短路径
networkx.bellman_ford_path(graph, source=0, target=6, weight='weight')
[0, 1, 3, 5, 6]
# A*算法
networkx.astar_path(graph, source=0, target=6, weight='weight')
[0, 1, 3, 5, 6]
# shortest_path()方法查找最短路径,可以选择dijkstra(默认)和 bellman-ford
print(networkx.shortest_path(graph, source=0, target=6, weight='weight', method='dijkstra'))
[0, 1, 3, 5, 6]
# 查找起点-终点的所有路径,距离依次递增
list(networkx.shortest_simple_paths(graph, source=0, target=6, weight='weight'))
[[0, 1, 3, 5, 6],
[0, 2, 5, 6],
[0, 2, 3, 5, 6],
[0, 1, 3, 4, 6],
[0, 2, 3, 4, 6],
[0, 1, 4, 6]]
单源最短路算法
计算给定起点-其他所有点的最短路径
# 使用dijkstra算法,计算给定起点-其他所有点的最短路径
networkx.single_source_dijkstra_path(graph, source=0, weight="weight")
{0: [0],
1: [0, 1],
2: [0, 2],
3: [0, 1, 3],
5: [0, 1, 3, 5],
4: [0, 1, 3, 4],
6: [0, 1, 3, 5, 6]}
# 使用bellman-ford算法,计算给定起点-其他所有点的最短路径
networkx.single_source_bellman_ford_path(graph, source=0, weight="weight")
{0: [0],
1: [0, 1],
2: [0, 2],
3: [0, 1, 3],
4: [0, 1, 3, 4],
5: [0, 1, 3, 5],
6: [0, 1, 3, 5, 6]}
若要在计算起点-终点的最短路径的同时获得距离,networkx可采用的方法有
single_source_dijkstra(G, source, target=None, cutoff=None, weight="weight")和single_source_bellman_ford(G, source, target=None, weight="weight"),若指定起点和终点,则计算起点-终点的最短路径及距离;若指定起点,不指定终点,则计算起点-所有其他点的最短路径及距离。
# 使用single_source_dijkstra(), 计算给定起点-终点的最短路径及距离
networkx.single_source_dijkstra(graph, source=0, target=6, weight='weight')
(11, [0, 1, 3, 5, 6])
# 返回起点-终点的最短路径及距离
networkx.single_source_bellman_ford(graph, source=0, target=6, weight='weight')
(11, [0, 1, 3, 5, 6])
# 使用single_source_dijkstra(), 计算给定起点-所有其他点的最短路径及距离
networkx.single_source_dijkstra(graph, source=0, target=None, weight='weight')
({0: 0, 2: 2, 1: 5, 3: 6, 4: 7, 5: 8, 6: 11},
{0: [0],
1: [0, 1],
2: [0, 2],
3: [0, 1, 3],
5: [0, 1, 3, 5],
4: [0, 1, 3, 4],
6: [0, 1, 3, 5, 6]})
# 使用single_source_bellman_ford(), 计算给定起点-所有其他点的最短路径及距离
networkx.single_source_bellman_ford(graph, source=0, target=None, weight='weight')
({0: 0, 1: 5, 2: 2, 3: 6, 4: 7, 5: 8, 6: 11},
{0: [0],
1: [0, 1],
2: [0, 2],
3: [0, 1, 3],
4: [0, 1, 3, 4],
5: [0, 1, 3, 5],
6: [0, 1, 3, 5, 6]})
# 返回起点-终点的最短路(无权)
networkx.bidirectional_shortest_path(graph, source=0, target=6)
[0, 1, 4, 6]
搜索起点-终点间的所有路径:shortest_simple_paths(G, source, target, weight=None)
list(networkx.shortest_simple_paths(graph, source=0, target=6, weight="weight"))
[[0, 1, 3, 5, 6],
[0, 2, 5, 6],
[0, 2, 3, 5, 6],
[0, 1, 3, 4, 6],
[0, 2, 3, 4, 6],
[0, 1, 4, 6]]
返回结果为所有路径,第一个为最短路径。该方法shortest_simple_paths基于Yen’s Algorithm,
Jin Y. Yen, “Finding the K Shortest Loopless Paths in a Network”, Management Science, Vol. 17, No. 11, Theory Series (Jul., 1971), pp. 712-716.
如果搜索前k短路径,时间复杂度为 O ( k V 3 ) O(kV^3) O(kV3):
from itertools import islice
def k_shortest_paths(G, source, target, k, weight="weight"):
return list(
islice(networkx.shortest_simple_paths(graph, source, target, weight=weight), k)
)
for path in k_shortest_paths(graph, 0, 6, k=3):
print(path)
[0, 1, 3, 5, 6]
[0, 2, 5, 6]
[0, 2, 3, 5, 6]
参考
- 深度优先算法详解
- https://blog.csdn.net/weixin_44267007/article/details/119770562
- https://blog.csdn.net/qq_40347399/article/details/119879750
- https://blog.csdn.net/wzy_2017/article/details/78910697
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!