Linux-ARM裸机(十一)-UART串口通信
????????无论单片机开发还是嵌入式 Linux 开发,串口都是最常用到的外设。可通过串口将开发板与电脑相连,然后在电脑上通过串口调试助手来调试程序。还有很多的模块,比如蓝牙、GPS、 GPRS 等都使用的串口来与主控进行通信的,在嵌入式 Linux 中一般使用串口作为控制台。本篇记录了如何驱动 I.MX6U 的串口,并使用串口和电脑进行通信。
UART 简介
1、 UART 通信格式
????????串口全称叫做串行接口,通常也叫?COM 接口,串行接口指的是数据一个一个的顺序传输,通信线路简单。使用两条线即可实现双向通信,一条用于发送,一条用于接收。串口通信距离远,但是速度相对会低,串口是一种很常用的工业接口。 I.MX6U 自带的 UART 外设就是串口的一种,UART 全称是 Universal Asynchronous Receiver/Trasmitter,也就是异步串行收发器。既然有异步串行收发器,那肯定也有同步串行收发器,比如:STM32除了有 UART 外,还有另外一 个叫做 USART 的东西 。USART 全称是 UniversalSynchronous/Asynchronous Receiver/Transmitter,也就是同步/异步串行收发器。 相比 UART 多了一个同步的功能,在硬件上体现出来的就是多了一条时钟线。 一般 USART 是可以作为 UART使用的,也就是不使用其同步的功能。
????????UART 作为串口的一种,其工作原理也是将数据一位一位的进行传输,发送和接收各用一条线,因此通过 UART 接口与外界相连最少需要三条线: TXD(发送)、 RXD(接收)和 GND(地线)。如下图UART 的通信格式:
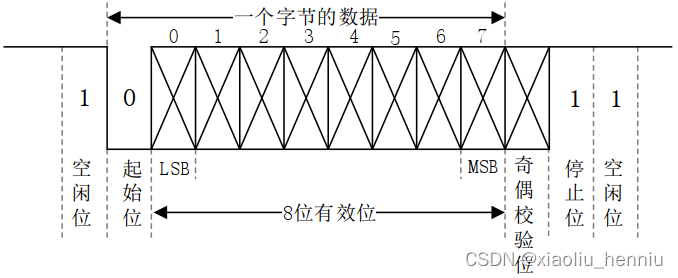
上图中各位的含义如下:
空闲位:数据线在空闲状态的时候为逻辑“1”状态,也就是高电平,表示没有数据线空闲,无数据传输。
起始位:当要传输数据的时候先传输一个逻辑“0”,也就是将数据线拉低,表示开始数据传输。
数据位: 数据位就是实际要传输的数据,数据位数可选择 5~8 位,我们一般都是按照字节传输数据的,一个字节 8 位,因此数据位通常是 8 位的。低位在前,先传输,高位最后传输。
奇偶校验位: 这是对数据中“1”的位数进行奇偶校验用的,可以不使用奇偶校验功能。
停止位:数据传输完成标志位,停止位的位数可以选择 1 位、 1.5 位或 2 位高电平,一般选择 1 位停止位。
波特率:波特率就是 UART 数据传输的速率,也就是每秒传输的数据位数,一般选择 9600、19200、 115200 等。
2、UART 电平标准
之前学习STM32时候笔记有所记录,本处重复记录。
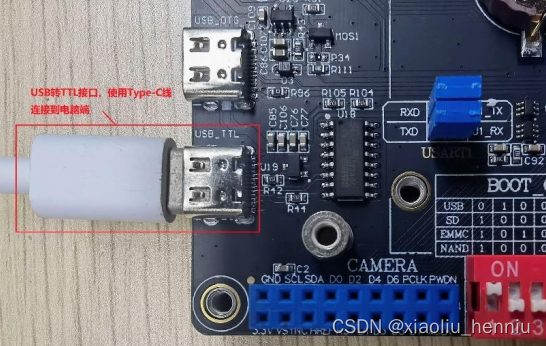
UART 一般的接口电平有 TTL 和 RS-232,一般开发板上都有 TXD 和 RXD 这样的引脚,这些引脚低电平表示逻辑 0,高电平表示逻辑 1,这个就是 TTL 电平。 而RS-232 采用差分线, -3~-15V 表示逻辑 1, +3~+15V 表示逻辑 0。一般如下图中的接口就是 TTL 电平,图中就是 USB 转 TTL 模块, TTL 接口部分有 VCC、 GND、 RXD、 TXD、RTS 和 CTS。 RTS 和 CTS 基本不用,用的时候通过杜邦线和其他模块的 TTL 接口相连即可。
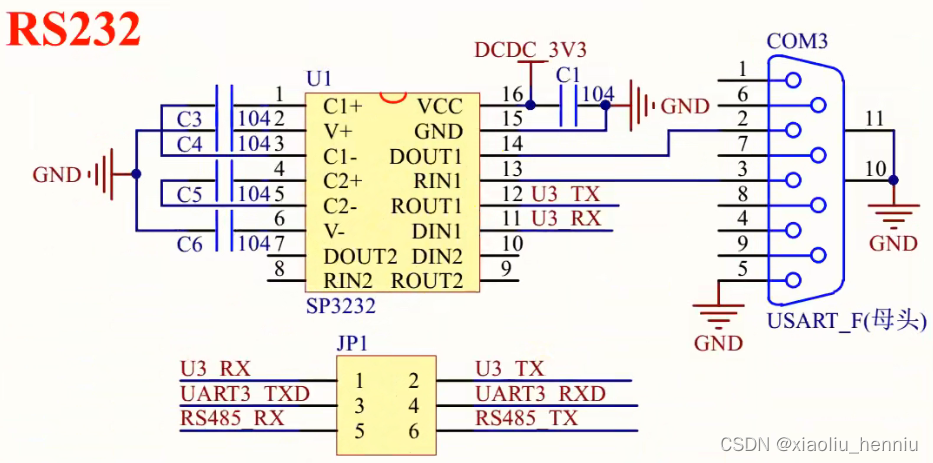
而RS-232 电平需要 DB9 接口, I.MX6U-ALPHA 开发板上的 COM3(UART3)口就是 RS-232 接
口的,如下图:

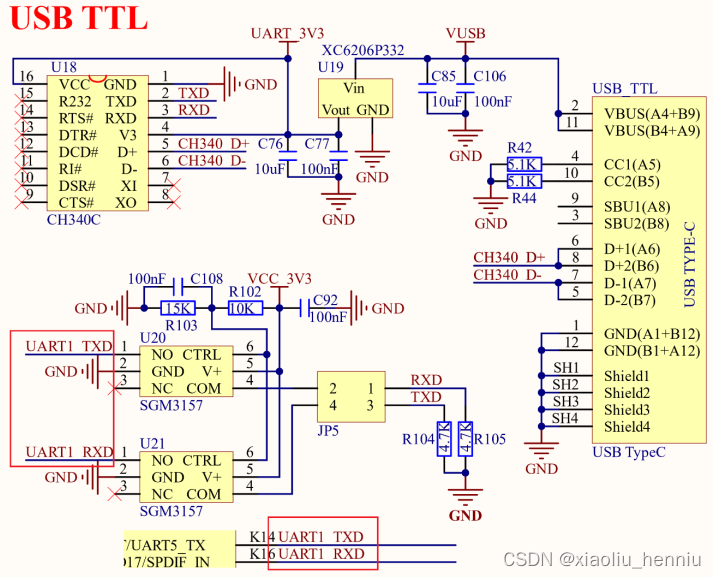
现在的电脑都没有 DB9 接口了,取而代之的是 USB 接口,所以催生出很多 USB转串口 TTL 芯片,比如 CH340、PL2303 等。通过这些芯片就可以实现串口 TTL 转 USB。I.MX6UALPHA 开发板就使用 CH340 芯片来完成 UART1 和电脑之间的连接,只需要一条USB 线即可,如下图:
I.MX6U UART 简介
UART 特性
前面介绍了 UART 接口,现在具体看一下 I.MX6U 的 UART 接口, I.MX6U 共有 8 个 UART,其主要特性如下:
- 兼容 TIA/EIA-232F 标准,速度最高可到 5Mbit/S。
- 支持串行 IR(红外) 接口,兼容 IrDA,最高可到 115.2Kbit/s。
- 支持 9 位或者多节点模式(RS-485)。
- 1 或 2 位停止位。
- 可编程的奇偶校验(奇校验和偶校验)。
- 自动波特率检测(最高支持 115.2Kbit/S)。
UART 几个重要寄存器
UART 的时钟源是由寄存器 CCM_CSCDR1 的 UART_CLK_SEL(bit6)位来选择的,当为 0时?UART 的时钟源为 pll3_80m(80MHz),为 1 时?UART 的时钟源为 osc_clk(24M),一般选择 pll3_80m 作为 UART 的时钟源。寄存器CCM_CSCDR1 的 UART_CLK_PODF(bit5:0)位是 UART 的时钟分频值,可设置 0~63,分别对应 1~64 分频,一般设置为 1 分频,则最终进入 UART 的时钟为 80MHz。
6ULL的UARTx_URXD寄存器保存着串口接收到的数据,要获取串口接收到的数据,读取此寄存器的低8位即可。UARTx_UTXD是串口发送数据寄存器,若需要通过串口发送数据,只需要将数据写入到此寄存器即可。
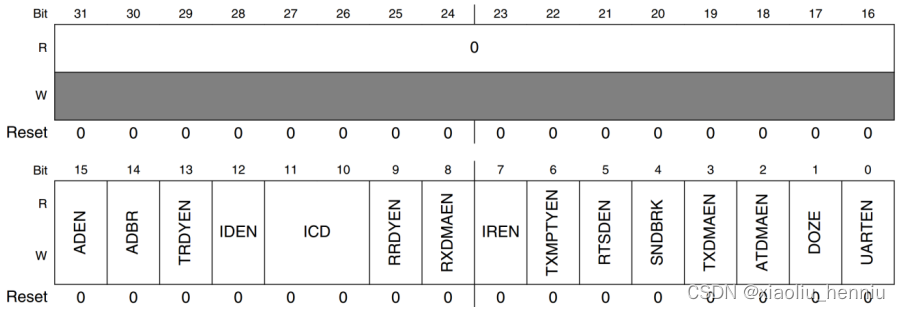
UART 的控制寄存器 1,即UARTx_UCR1(x=1~8),寄存器 UARTx_UCR1 中用到的重要位如下:
ADBR(bit14):自动波特率检测使能位,为 0 的时候关闭自动波特率检测,为 1 的时候使能自动波特率检测。
UARTEN(bit0): UART 使能位,为 0 时关闭 UART,为 1 时使能 UART。
此寄存器的结构如下图:
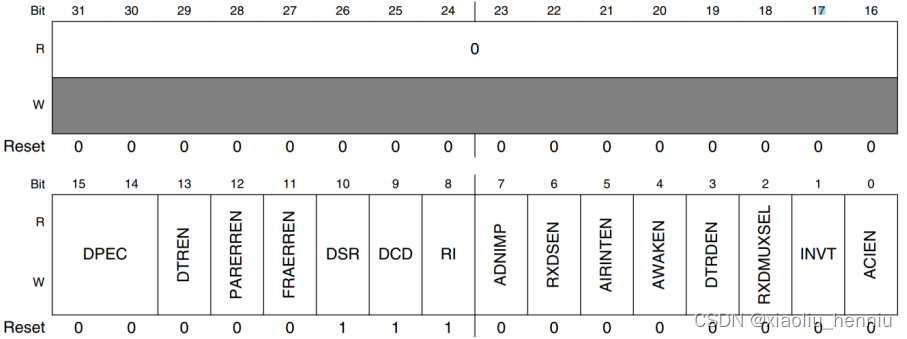
UART 的控制寄存器 2: UARTx_UCR2。寄存器 UARTx_UCR2 用到的重要位如下:
IRTS(bit14):为 0 的时候使用 RTS 引脚功能,为 1 的时候忽略 RTS 引脚。
PREN(bit8):奇偶校验使能位,为 0 的时候关闭奇偶校验,为 1 的时候使能奇偶校验。
PROE(bit7):奇偶校验模式选择位,开启奇偶校验以后此位如果为 0 的话就使用偶校验,此位为 1 的话就使能奇校验。
STOP(bit6):停止位数量,为 0 的话 1 位停止位,为 1 的话 2 位停止位。
WS(bit5):数据位长度,为 0 的时候选择 7 位数据位,为 1 的时候选择 8 位数据位。
TXEN(bit2):发送使能位,为 0 时关闭 UART 的发送功能,为 1 时打开 UART的发送功能。
RXEN(bit1):接收使能位,为 0 时关闭 UART 的接收功能,为 1 时打开 UART的接收功能。
SRST(bit0):软件复位,为 0 时软件复位 UART,为 1 时表示复位完成。复位完成以后此位会自动置 1,表示复位完成。此位只能写 0,写 1 会被忽略掉。
此寄存器结构如图下图: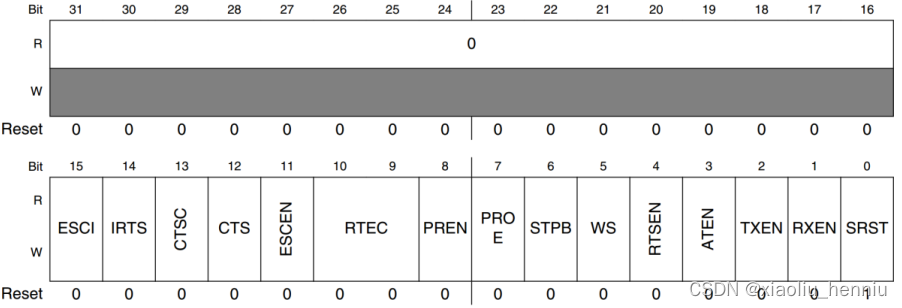
UARTx_UCR3 寄存器,本篇的实验只用到了寄存器 UARTx_UCR3 中的位 RXDMUXSEL(bit2),这个位应该始终为 1,此寄存器结构如下图:
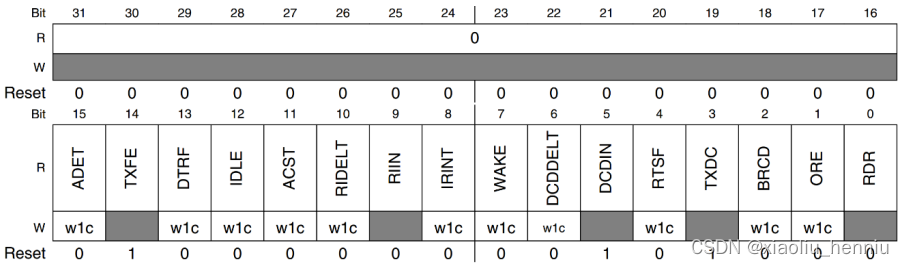
寄存器 UARTx_USR2,是 UART 的状态寄存器 2。寄存器 UARTx_USR2 用到的重要位如下:
TXDC(bit3):发送完成标志位,为 1 的时候表明发送缓冲(TxFIFO)和移位寄存器为空,也就是发送数据完成,向 TxFIFO 写入数据后此就会自动清零。
RDR(bit0):数据接收标志位,为 1 时表明至少接收到一个数据,可以从寄存器UARTx_URXD 寄存器中读取数据了,接收到数据以后此位会自动清零。
此寄存器结构如下图:
通过时钟树图可看出:UART的时钟源 = PLL3/6?= 480/6 = 80MHz。CSCDR1寄存器的UART_CLK_SEL位设置UART的时钟源,为0的时候,UART时钟源为80MHz,为1的时候UART时钟源为24MHz晶振。CSCDR1寄存器的UART_CLK_PODF位控制分频,一般设置为1分频。此处分频完之后,80MHz的时钟进入UART可再通过寄 存 器UARTx_UFCR的RFDIV(bit9:7)位来设置进一步分频。如下:
寄 存 器UARTx_UFCR?中要用到的是位 RFDIV(bit9:7),用来设置时钟分频值,设置如下表:
寄 存 器 UARTx_UFCR 、 UARTx_UBIR 和 UARTx_UBMR,通过这三个寄存器决定 UART 的波特率,波特率的计算公式如下:
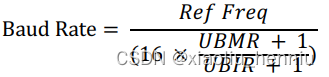
- Ref Freq:经过分频以后进入 UART 的最终时钟频率,分频值由寄存器UARTx_UFCR设置。
- UBMR:寄存器 UARTx_UBMR 中的值。
- UBIR:寄存器 UARTx_UBIR 中的值。
通过 UARTx_UFCR 的 RFDIV 位、 UARTx_UBMR 和 UARTx_UBIR 三者的配合即可得到想要的波特率。比如要设置 UART 波特率为 115200,那么可以设置 RFDIV 为5(0b101),也就是 1 分频,因此 Ref Freq=80MHz。设置 UBIR=71, UBMR=3124,根据上面的公式可以得到:

最后介绍一下寄存器 UARTx_URXD 和 UARTx_UTXD,这两个寄存器分别为 UART 的接收和发送数据寄存器,这两个寄存器的 低八位为接到的和要发送的数据。读取寄存器UARTx_URXD 即可获取接收到的数据,若要通过 UART 发送数据,直接将数据写入寄存器 UARTx_UTXD 即可。
UART1 基本数据收发实验
配置步骤如下:
本篇使用 I.MX6U 的 UART1 完成开发板与电脑串口调试助手间串口通信, UART1 具体配置步骤如下:
- 设置 UART1 的时钟源:设置 UART 的时钟源为 pll3_80m,设置寄存器 CCM_CSCDR1 的 UART_CLK_SEL 位为 0 即可。
- 初始化 UART1:初始化 UART1 所使用 IO,设置 UART1 的寄存器 UART1_UCR1 ~ UART1_UCR3,设置内容包括:波特率,奇偶校验、停止位、数据位等等。
- 使能 UART1:UART1 初始化完成以后就可以使能 UART1 了,设置寄存器 UART1_UCR1 的位 UARTEN为 1。
- 编写 UART1 数据收发函数:编写两个函数用于 UART1 的数据收发操作
硬件原理分析
I.MX6U-ALPHA 开发板串口 1 原理图:
实验之前需要用 USB 串口线将串口 1 和电脑连接起来,还需要设置 JP5 跳线帽,将串口 1 的 RXD、 TXD 两个引脚分别与 P116、 P117 连接一起,串口 1 硬件连接设置图如下: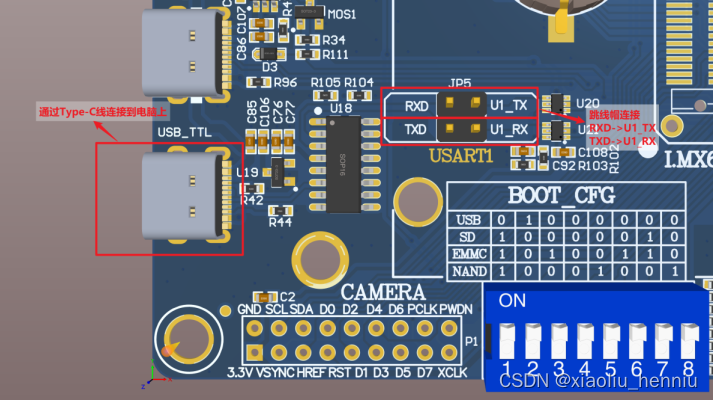
实验程序编写
在 bsp 文件夹下创建“uart”文件夹,然后在 bsp/uart 中新建 bsp_uart.c 和 bsp_uart.h 两个文件。
bsp_uart.h:
全部为函数声明,具体的函数实现在bsp_uart.c文件中。
#ifndef _BSP_UART_H
#define _BSP_UART_H
#include "imx6ul.h"
/* 函数声明 */
void uart_init(void);
void uart_io_init(void);
void uart_disable(UART_Type *base);
void uart_enable(UART_Type *base);
void uart_softreset(UART_Type *base);
void uart_setbaudrate(UART_Type *base,unsigned int baudrate,unsigned int srcclock_hz);
void putc(unsigned char c);
void puts(char *str);
unsigned char getc(void);
void raise(int sig_nr);
#endifbsp_uart.c:
文件 bsp_uart.c 中共有 10 个函数。
第一个函数是 uart_init:这个函数是 UART1 初始化函数,用于初始化 UART1 相关的 IO、并且设置 UART1的波特率、字长、停止位和校验模式等,初始化完成后就使能 UART1。
第二个函数是uart_io_init:用于初始化 UART1 所使用的 IO。
第三个函数是 uart_setbaudrate:这个函数是从NXP 官方的 SDK 包里面移植过来的,用于设置波特率。我们只需将要设置的波特率告诉此函数,此函数就会使用逐次逼近方式来计算出寄存器 UART1_UFCR 的 FRDIV 位、寄存器UART1_UBIR 和寄存器 UART1_UBMR 这三个的值。
第四和第五这两个函数为 uart_disable 和uart_enable,分别是使能和关闭 UART1。
第六个函数是 uart_softreset:用于软件复位指定的 UART。
第七个函数是putc:用于通过UART1发送一个字节的数据。
第八个函数是 puts:用于通过UART1发送一串数据。
第九个函数是 getc:用于通过 UART1 获取一个字节的数据。
最后一个函数是raise:这是一个空函数,防止编译器报错。
#include "bsp_uart.h"
//初始化串口 1,波特率为 115200
void uart_init(void)
{
/* 1、初始化串口 IO */
uart_io_init();
/* 2、初始化 UART1 */
uart_disable(UART1); /* 先关闭 UART1 */
uart_softreset(UART1); /* 软件复位 UART1 */
UART1->UCR1 = 0; /* 先清除 UCR1 寄存器 */
UART1->UCR1 &= ~(1<<14); /* 关闭自动波特率检测 */
/*
* 设置 UART 的 UCR2 寄存器,设置字长,停止位,校验模式,关闭硬件流控
* bit14: 1 忽略 RTS 引脚
* bit8: 0 关闭奇偶校验
* bit6: 0 1 位停止位
* bit5: 1 8 位数据位
* bit2: 1 打开发送
* bit1: 1 打开接收
*/
UART1->UCR2 |= (1<<14) | (1<<5) | (1<<2) | (1<<1);
UART1->UCR3 |= 1<<2; /* UCR3 的 bit2 必须为 1 */
/*
* 设置波特率:根据上文介绍的波特率计算公式。
* 如果要设置波特率为 115200,那么可以使用如下参数:
* Ref Freq = 80M 也就是寄存器 UFCR 的 bit9:7=101, 表示 1 分频
* UBMR = 3124
* UBIR = 71
*/
UART1->UFCR = 5<<7; /* ref freq 等于 ipg_clk/1=80Mhz */
UART1->UBIR = 71;
UART1->UBMR = 3124;
//此处屏蔽了NXP 官方的 SDK 包里面移植过来的设置波特率函数,波特率可自己配还可直接调此函数
#if 0
uart_setbaudrate(UART1, 115200, 80000000); /* 设置波特率 */
#endif
uart_enable(UART1); /* 使能串口 */
}
//初始化串口 1 所使用的 IO 引脚
void uart_io_init(void)
{
/* 1、初始化串口 IO
* UART1_RXD -> UART1_TX_DATA
* UART1_TXD -> UART1_RX_DATA
*/
IOMUXC_SetPinMux(IOMUXC_UART1_TX_DATA_UART1_TX, 0);
IOMUXC_SetPinMux(IOMUXC_UART1_RX_DATA_UART1_RX, 0);
IOMUXC_SetPinConfig(IOMUXC_UART1_TX_DATA_UART1_TX, 0x10B0);
IOMUXC_SetPinConfig(IOMUXC_UART1_RX_DATA_UART1_RX, 0x10B0);
}
/*
* @description : 波特率计算公式,可用此函数计算出指定串口对应的
*UFCR,UBIR 和 UBMR 这三个寄存器的值
* @param - base : 要计算的串口。
* @param - baudrate : 要使用的波特率。
* @param - srcclock_hz : 串口时钟源频率,单位 Hz
*/
void uart_setbaudrate(UART_Type *base,unsigned int baudrate,unsigned int srcclock_hz)
{
uint32_t numerator = 0u;
uint32_t denominator = 0U;
uint32_t divisor = 0U;
uint32_t refFreqDiv = 0U;
uint32_t divider = 1U;
uint64_t baudDiff = 0U;
uint64_t tempNumerator = 0U;
uint32_t tempDenominator = 0u;
/* get the approximately maximum divisor */
numerator = srcclock_hz;
denominator = baudrate << 4;
divisor = 1;
while (denominator != 0)
{
divisor = denominator;
denominator = numerator % denominator;
numerator = divisor;
}
numerator = srcclock_hz / divisor;
denominator = (baudrate << 4) / divisor;
/* numerator ranges from 1 ~ 7 * 64k */
/* denominator ranges from 1 ~ 64k */
if ((numerator > (UART_UBIR_INC_MASK * 7)) || (denominator > UART_UBIR_INC_MASK))
{
uint32_t m = (numerator - 1) / (UART_UBIR_INC_MASK * 7) + 1;
uint32_t n = (denominator - 1) / UART_UBIR_INC_MASK + 1;
uint32_t max = m > n ? m : n;
numerator /= max;
denominator /= max;
if (0 == numerator)
{
numerator = 1;
}
if (0 == denominator)
{
denominator = 1;
}
}
divider = (numerator - 1) / UART_UBIR_INC_MASK + 1;
switch (divider)
{
case 1:
refFreqDiv = 0x05;
break;
case 2:
refFreqDiv = 0x04;
break;
case 3:
refFreqDiv = 0x03;
break;
case 4:
refFreqDiv = 0x02;
break;
case 5:
refFreqDiv = 0x01;
break;
case 6:
refFreqDiv = 0x00;
break;
case 7:
refFreqDiv = 0x06;
break;
default:
refFreqDiv = 0x05;
break;
}
/* Compare the difference between baudRate_Bps and calculated
* baud rate. Baud Rate = Ref Freq / (16 * (UBMR + 1)/(UBIR+1)).
* baudDiff = (srcClock_Hz/divider)/( 16 * ((numerator /divider)/ denominator).
*/
tempNumerator = srcclock_hz;
tempDenominator = (numerator << 4);
divisor = 1;
/* get the approximately maximum divisor */
while (tempDenominator != 0)
{
divisor = tempDenominator;
tempDenominator = tempNumerator % tempDenominator;
tempNumerator = divisor;
}
tempNumerator = srcclock_hz / divisor;
tempDenominator = (numerator << 4) / divisor;
baudDiff = (tempNumerator * denominator) / tempDenominator;
baudDiff = (baudDiff >= baudrate) ? (baudDiff - baudrate) : (baudrate - baudDiff);
if (baudDiff < (baudrate / 100) * 3)
{
base->UFCR &= ~UART_UFCR_RFDIV_MASK;
base->UFCR |= UART_UFCR_RFDIV(refFreqDiv);
base->UBIR = UART_UBIR_INC(denominator - 1);
base->UBMR = UART_UBMR_MOD(numerator / divider - 1);
}
}
void uart_disable(UART_Type *base)//关闭指定的UART
{
base->UCR1 &= ~(1<<0);
}
void uart_enable(UART_Type *base)//打开指定的UART
{
base->UCR1 |= (1<<0);
}
void uart_softreset(UART_Type *base)//复位指定的 UART
{
base->UCR2 &= ~(1<<0); /* 复位 UART */
while((base->UCR2 & 0x1) == 0); /* 等待复位完成 */
}
void putc(unsigned char c)//发送一个字符,传入的参数为要发送的字符
{
while(((UART1->USR2 >> 3) &0X01) == 0);/* 等待上一次发送完成 */
UART1->UTXD = c & 0XFF; /* 发送数据 */
}
void puts(char *str)//发送一个字符串,传入的参数为要发送的字符串
{
char *p = str;
while(*p)
putc(*p++);
}
unsigned char getc(void) //接收一个字符,返回值为接收到的字符
{
while((UART1->USR2 & 0x1) == 0); /* 等待接收完成 */
return UART1->URXD; /* 返回接收到的数据 */
}
void raise(int sig_nr) //防止编译器报错
{
}main.c:
调用函数 uart_init 初始化 UART1,然后在 while 循环里面获取串口接收到的数据,并且将获取到的数据通过串口打印出来。
#include "bsp_clk.h"
#include "bsp_delay.h"
#include "bsp_led.h"
#include "bsp_beep.h"
#include "bsp_key.h"
#include "bsp_int.h"
#include "bsp_uart.h"
int main(void)
{
unsigned char a=0;
unsigned char state = OFF;
int_init(); /* 初始化中断(一定要最先调用! ) */
imx6u_clkinit(); /* 初始化系统时钟 */
delay_init(); /* 初始化延时 */
clk_enable(); /* 使能所有的时钟 */
led_init(); /* 初始化 led */
beep_init(); /* 初始化 beep */
uart_init(); /* 初始化串口,波特率 115200 */
while(1)
{
puts("请输入 1 个字符:");
a=getc();
putc(a); /* 回显功能 */
puts("\r\n");
/* 显示输入的字符 */
puts("您输入的字符为:");
putc(a);
puts("\r\n\r\n");
state = !state;
led_switch(LED0,state);
}
return 0;
}Makefile:
本章 Makefile 文件在链接时加入了数学库, 因为在 bsp_uart.c 中有个函数uart_setbaudrate,此函数中使用到了除法运算,因此在链接时需要将编译器的数学库也链接进来。第9行的变量LIBPATH就是数学库的目录,在第56行链接的时候使用了变量LIBPATH。
我们常要用到一些第三方库,那么在连接程序时就要指定这些第三方库所在的目录, Makefile 在链接的时候使用选项“-L”来指定库所在的目录,比如下面代码中第 9 行的变量 LIBPATH 就是指定了我们所使用的编译器库所在的目录。
②、 在第 61 行和 64 行中,加入了选项“-fno-builtin”,否则编译的时候提示“putc”、“puts”
这两个函数与内建函数冲突,错误信息如下所示:
warning: conflicting types for built-in function ‘putc’
warning: conflicting types for built-in function ‘puts’编译时加入选项“-fno-builtin”表示不使用内建函数,我们就可自己实现 putc和 puts 这样的函数了。
1 CROSS_COMPILE ?= arm-linux-gnueabihf-
2 TARGET ?= uart
3
4 CC := $(CROSS_COMPILE)gcc
5 LD := $(CROSS_COMPILE)ld
6 OBJCOPY := $(CROSS_COMPILE)objcopy
7 OBJDUMP := $(CROSS_COMPILE)objdump
8
9 LIBPATH := -lgcc -L /usr/local/arm/gcc-linaro-4.9.4-2017.01-
x86_64_arm-linux-gnueabihf/lib/gcc/arm-linux-gnueabihf/4.9.4
10
11
12 INCDIRS := imx6ul \
13 bsp/clk \
14 bsp/led \
15 bsp/delay \
16 bsp/beep \
17 bsp/gpio \
18 bsp/key \
19 bsp/exit \
20 bsp/int \
21 bsp/epittimer \
22 bsp/keyfilter \
23 bsp/uart
24
25 SRCDIRS := project \
26 bsp/clk \
27 bsp/led \
28 bsp/delay \
29 bsp/beep \
30 bsp/gpio \
31 bsp/key \
32 bsp/exit \
33 bsp/int \
34 bsp/epittimer \
35 bsp/keyfilter \
36 bsp/uart
37
38
39 INCLUDE := $(patsubst %, -I %, $(INCDIRS))
40
41 SFILES := $(foreach dir, $(SRCDIRS), $(wildcard $(dir)/*.S))
42 CFILES := $(foreach dir, $(SRCDIRS), $(wildcard $(dir)/*.c))
43
44 SFILENDIR := $(notdir $(SFILES))
45 CFILENDIR := $(notdir $(CFILES))
46
47 SOBJS := $(patsubst %, obj/%, $(SFILENDIR:.S=.o))
48 COBJS := $(patsubst %, obj/%, $(CFILENDIR:.c=.o))
49 OBJS := $(SOBJS) $(COBJS)
50
51 VPATH := $(SRCDIRS)
52
53 .PHONY: clean
54
55 $(TARGET).bin : $(OBJS)
56 $(LD) -Timx6ul.lds -o $(TARGET).elf $^ $(LIBPATH)
57 $(OBJCOPY) -O binary -S $(TARGET).elf $@
58 $(OBJDUMP) -D -m arm $(TARGET).elf > $(TARGET).dis
59
60 $(SOBJS) : obj/%.o : %.S
61 $(CC) -Wall -nostdlib -fno-builtin -c -O2 $(INCLUDE) -o $@ $<
62
63 $(COBJS) : obj/%.o : %.c
64 $(CC) -Wall -nostdlib -fno-builtin -c -O2 $(INCLUDE) -o $@ $<
65
66 clean:
67 rm -rf $(TARGET).elf $(TARGET).dis $(TARGET).bin $(COBJS) $(SOBJS)链接脚本保持不变。
串口格式化函数移植实验
上面实验实现了 UART1 基本的数据收发功能,虽然可以用来调试程序,但是功能单一,只能输出字符。若需要输出数字还需要我们自己先将数字转换为字符,非常不方便。我们可以将 printf 函数映射到串口上,这样就可使用printf 函数完成格式化输出了,使用非常方便。本实验即实现将 printf 这样的格式化函数移植到 I.MX6U-ALPHA 开发板上。
串口格式化函数简介
格式化函数说的是 printf、 sprintf 和 scanf 这样的函数,分为格式化输入和格式化输出两类函数。学习 C 语言的时常通过 printf 函数在屏幕上显示字符串,通过 scanf 函数从键盘获取输入。这样有了输入和输出,实现了最基本的人机交互。学习 STM32 时将 printf 映射到串口上,这样即使没有屏幕,也可通过串口来和开发板进行交互。在 I.MX6U-ALPHA 开发板上也可以使用此方法,将 printf 和 scanf 映射到串口上,这样就可使用串口调试助手的上位机作为开发板终端, 完成与开发板的交互。也可以使用 printf 和 sprintf 来实现各种各样的格式化字符串,方便我们开发调试程序。之前基本串口收发数据实验中,串口驱动已编写完成,本实验通过移植网上别人已经做好的文件来实现格式化函数。
实验程序编写
本实验所需要移植的源码在正点原子开发板资料中,路径为: 1、例程源码->5、模块驱动源码->2、格式化函数源码->stdio,文件夹 stdio 里面的文件就是我们要移植的源码文件。本实验在上一实验例程的基础上完成,将 stdio 文件夹复制到实验工程根目录中。
stdio 里面有两个文件夹: include 和 lib,这两个文件夹里面的内容如下:

stdio 里面的文件是从 uboot 里移植过来的。后面学习 uboot 后可以自行从 uboot 源码里面“扣”出相应的文件,完成格式化函数的移植。这里 stdio 中并没有实现完全版的格式化函数,比如 printf 函数并不支持浮点数,但是基本够使用。移植好以后就要测试相应的函数工作是否正常。如下代码,测试移植是否成功。使用 scanf 函数等待键盘输入两个整数,然后将两个整数进行相加并使用 printf 函数输出结果:
#include "bsp_clk.h"
#include "bsp_delay.h"
#include "bsp_led.h"
#include "bsp_beep.h"
#include "bsp_key.h"
#include "bsp_int.h"
#include "bsp_uart.h"
#include "stdio.h"
int main(void)
{
int c = 100;
printf("%d的十六进制为:%#x\r\n",c,c); //验证一下打印十六进制数
unsigned char state = OFF;
int a , b;
int_init(); /* 初始化中断(一定要最先调用! ) */
imx6u_clkinit(); /* 初始化系统时钟 */
delay_init(); /* 初始化延时 */
clk_enable(); /* 使能所有的时钟 */
led_init(); /* 初始化 led */
beep_init(); /* 初始化 beep */
uart_init(); /* 初始化串口,波特率 115200 */
while(1)
{
printf("输入两个整数,使用空格隔开:");
scanf("%d %d", &a, &b); /* 输入两个整数 */
printf("\r\n 数据%d + %d = %d\r\n\r\n", a, b, a+b);/* 输出和 */
state = !state;
led_switch(LED0,state);
}
return 0;
}修改 Makefile 中的 TARGET 为 printf,在 INCDIRS 中加入“stdio/include”,在 SRCDIRS 中加入“stdio/lib”,
1 CROSS_COMPILE ?= arm-linux-gnueabihf-
2 TARGET ?= printf
3
4
/* 省略掉其它代码...... */
5
6 INCDIRS := imx6ul \
7 stdio/include \
8 bsp/clk \
9 bsp/led \
10 bsp/delay \
11 bsp/beep \
12 bsp/gpio \
13 bsp/key \
14 bsp/exit \
15 bsp/int \
16 bsp/epittimer \
17 bsp/keyfilter \
18 bsp/uart
19
20 SRCDIRS := project \
21 stdio/lib \
22 bsp/clk \
23 bsp/led \
24 bsp/delay \
25 bsp/beep \
26 bsp/gpio \
27 bsp/key \
28 bsp/exit \
29 bsp/int \
30 bsp/epittimer \
31 bsp/keyfilter \
32 bsp/uart
33
34 /* 省略掉其它代码...... */
35
36 $(COBJS) : obj/%.o : %.c
37 $(CC) -Wall -Wa,-mimplicit-it=thumb -nostdlib -fno-builtin -c -O2 $(INCLUDE) -o $@ $<
38
39 clean:
40 rm -rf $(TARGET).elf $(TARGET).dis $(TARGET).bin $(COBJS) $(SOBJS)第 2 行修改变量 TARGET 为“printf”,也就是目标名称为“printf”。
第 7 行在变量 INCDIRS 中添加 stdio 相关头文件(.h)路径。
第 28 行在变量 SRCDIRS 中添加 stdio 相关文件(.c)路径。
第 37 行在编译 C 文件的时候添加了选项“-Wa,-mimplicit-it=thumb”,否则的话会有如下错误提示:
thumb conditional instruction should be in IT block -- `addcs r5,r5,#65536'链接脚本保持不变。
实验现象:I.MX6U开发板通过printf函数将 “输入两个整数,使用空格隔开” 打印到串口调试助手上位机SecureCRT界面。键盘键入两个整数,通过串口传给了I.MX6U开发板,然后通过scanf函数接收,接收到整数然后进行计算后,通过printf函数打印到SecureCRT的界面上。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 实验五:动态路由配置
- Vivado建立后如何修改工程名称
- 2023年03月21日_chatgpt宕机事件的简单回顾
- 项目解决方案:多地医馆的高清视频监控接入汇聚联网
- 小程序地图检索
- 实验二 LL(1)语法分析法设计与实现
- 【NewSQL】-- 分布式数据库 TiDB 和 CockroachDB
- 3. 观察Application
- MySQL:ERROR 1067 - Invalid default value for ‘end_time‘【解决办法】
- 【Docker】在容器中管理数据