ROS URDF-joint标签
在ROS中,URDF是一种 XML 格式,用于描述机器人的机械结构、关节属性和传感器布局等信息。在URDF文件中,<joint>标签是用来定义机器人模型中各个关节的,它是链接(link)之间的连接点,允许它们相对运动。
joint标签用于描述机器人关节的运动学和动力学属性,以及指定关节运动的安全极限。
一个joint标签通常需要连接两个link,即父部件(parent link)和子部件(child link)。这两个部件之间的相对位置是由父部件的origin确定。
不同的关节有不同的运动形式: 旋转、滑动、固定等等,例如:安装在底座上的轮子可以360度旋转,而摄像头完全固定在底座上。
1.属性:
name ---> 为关节命名
type ---> 关节运动形式??
continuous: 旋转关节,可以绕单轴无限旋转
fixed: 固定关节,不允许运动的特殊关节
revolute: 旋转关节,类似于 continues,但是有旋转角度限制
prismatic: 滑动关节,沿某一轴线移动的关节,有位置极限
planer: 平面关节,允许在平面正交方向上平移或旋转
floating: 浮动关节,允许进行平移、旋转运动
2、子标签:
parent(必需的)
parent link的名字是一个强制的属性:
link:父级连杆的名字
child(必需的)
child link的名字是一个强制的属性:
link:子级连杆的名字
origin
属性: xyz=各轴线上的偏移量 rpy=各轴线上的偏移弧度。
父部件的原点位置,通常用一个三元组表示(x, y, z)。
axis
属性: xyz用于设置围绕哪个关节轴运动。
关节的旋转轴,通常用一个三元组表示(x, y, z)。

与人的关节一样,机器人关节的主要作用是连接两个刚体link,这两个link分别称为parent link 和child link,如图所示。
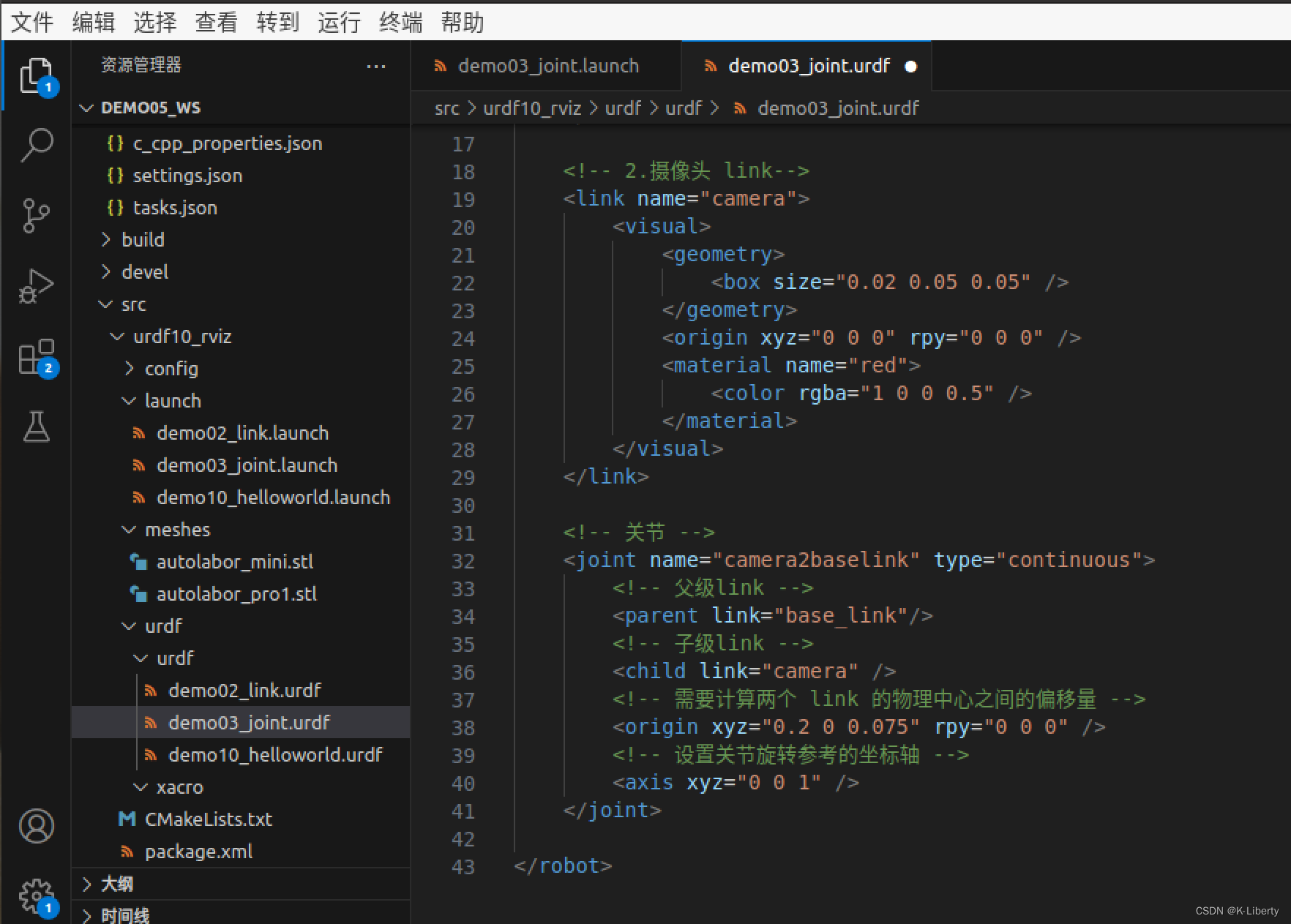
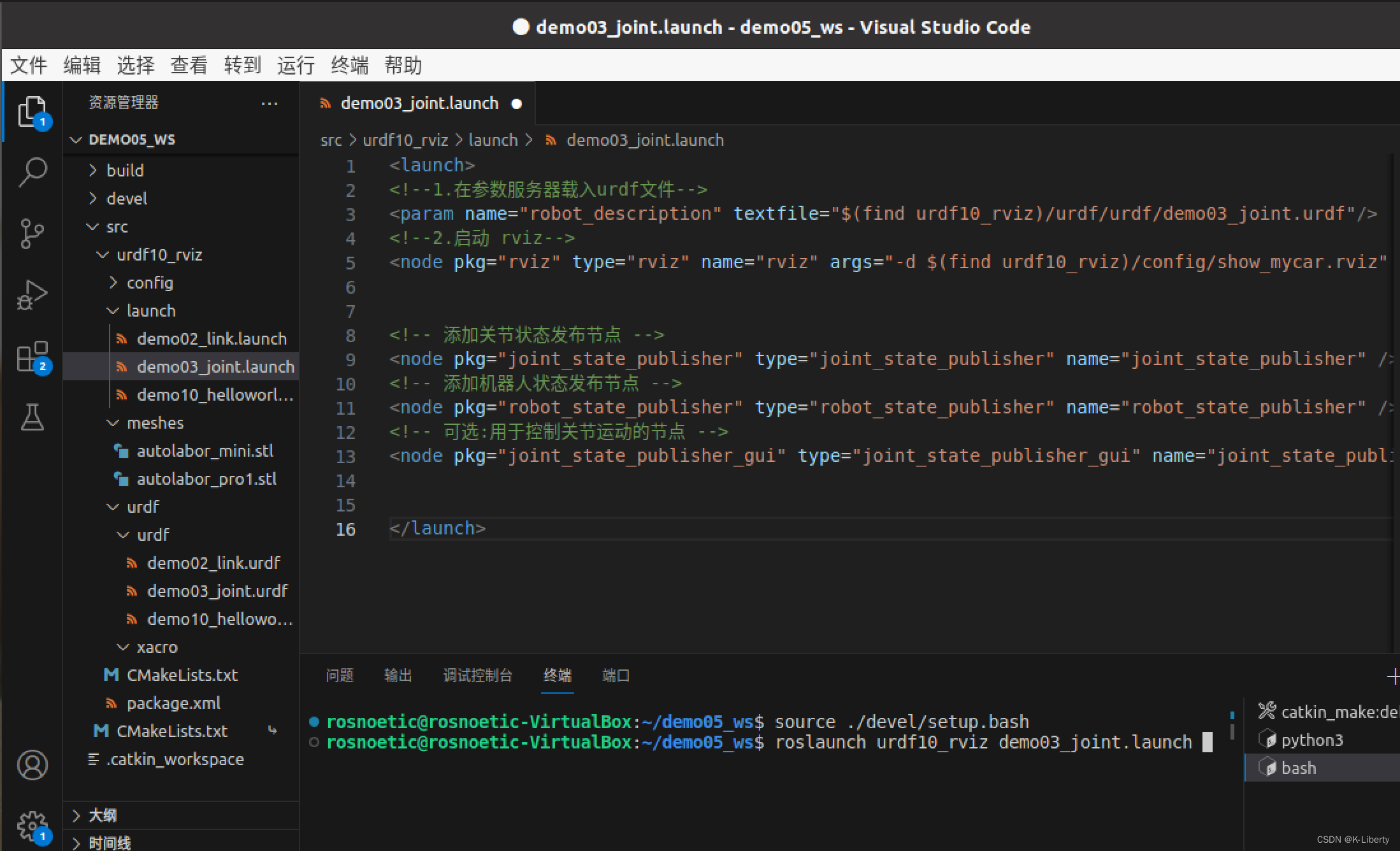
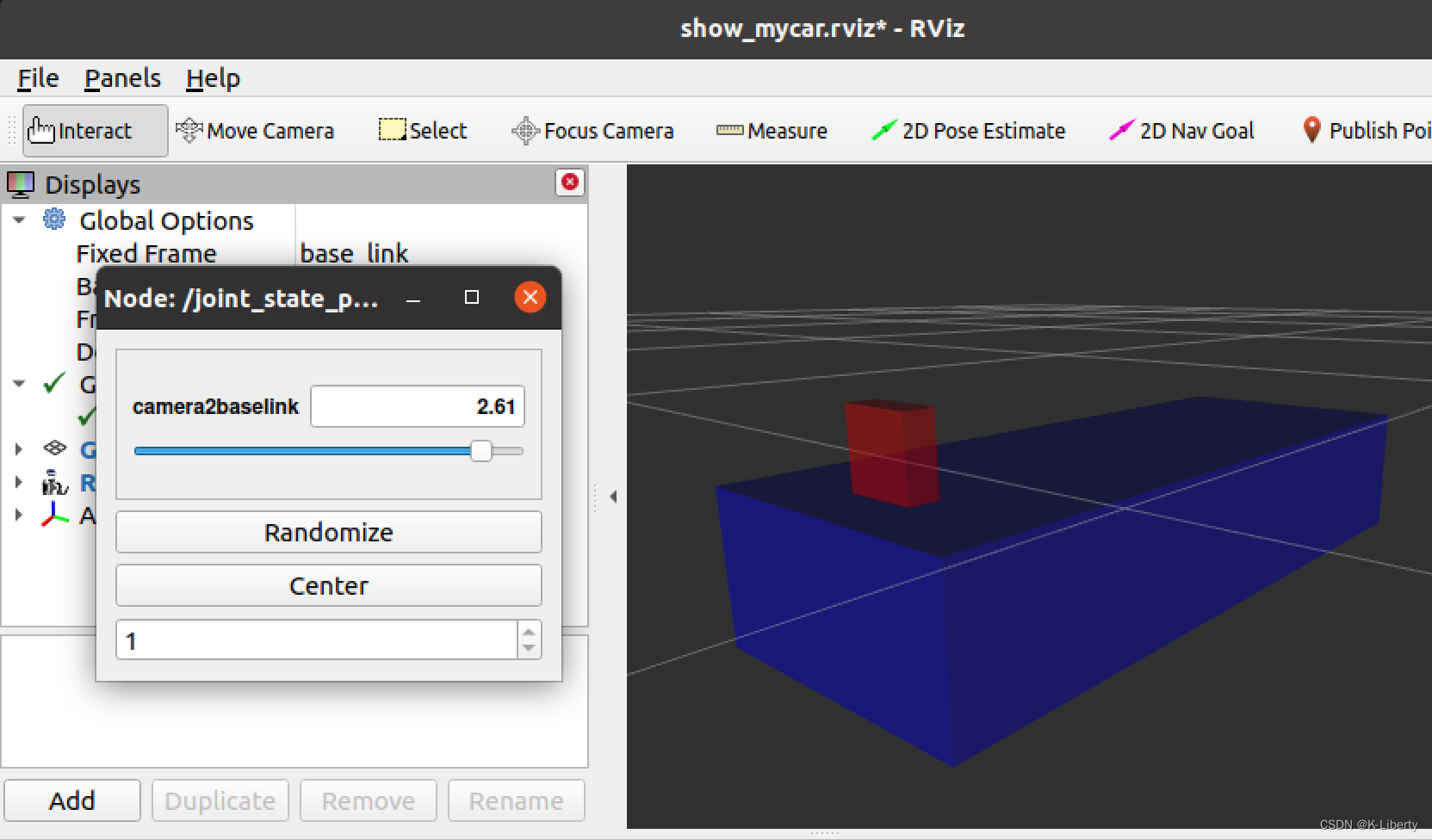
实例演示:
创建机器人模型,底盘为长方体,在长方体的前面添加一摄像头,摄像头可以沿着 Z 轴 360 度旋转




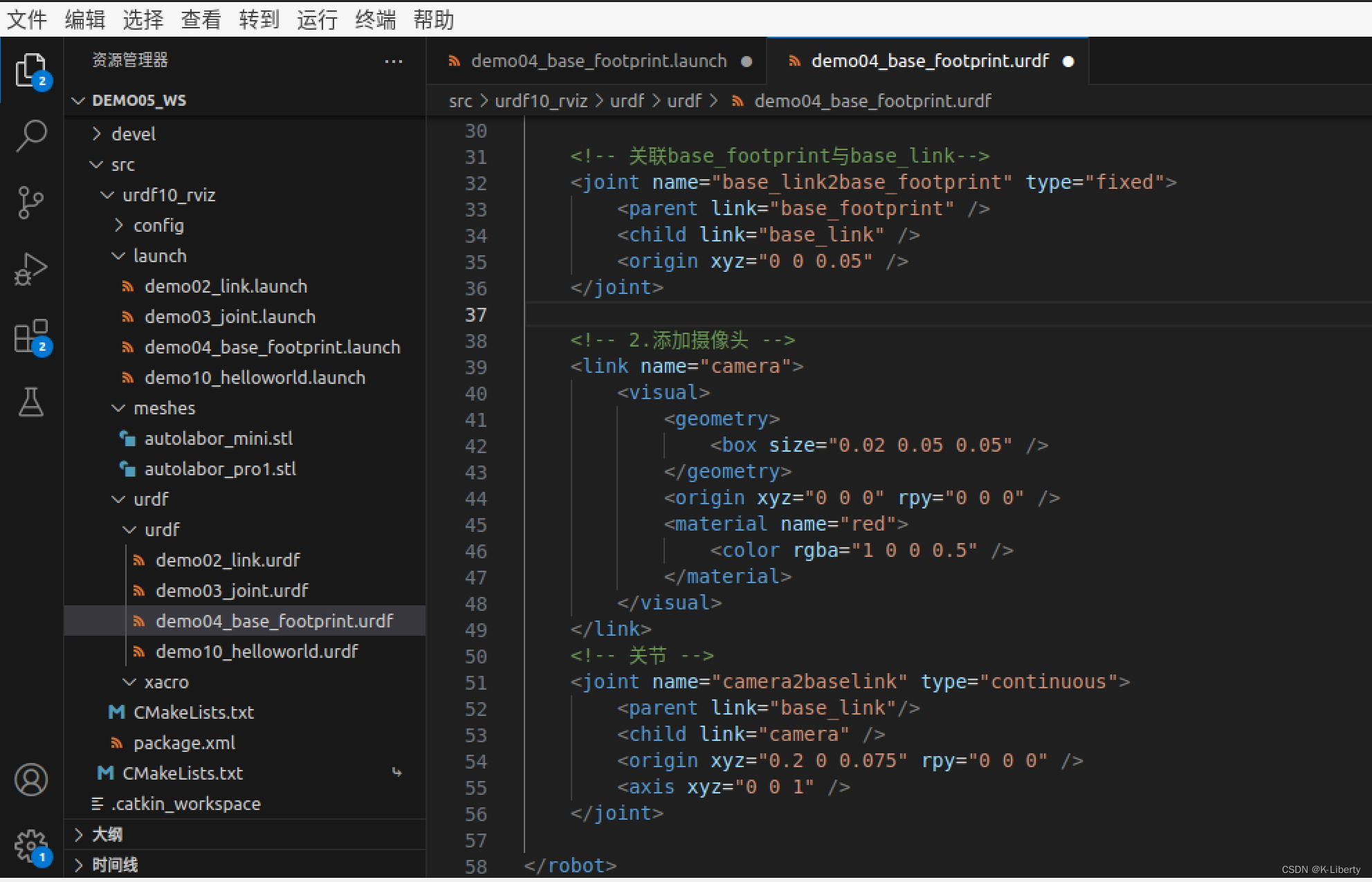
注意:在ROS中,base_footprint是机器人底部的中心点,通常被认为是机器人的基准点。它是机器人运动学中的一个重要坐标系,用于描述机器人在地图中的位置和姿态。




本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 阿里云服务器新购、续费、升级优惠活动及代金券领取入口汇总
- 计算机视觉基础(11)——语义分割和实例分割
- TiDB在WMS物流系统的应用与实践 (转)
- 电子招标采购系统源码之从供应商管理到采购招投标、采购合同、采购执行的全过程数字化管理
- 《Kotlin核心编程》笔记:面向表达式编程
- 基于物联网的建筑物综合环境能耗监测管理系统是如何实现节能的
- SpringBoot结合MybatisPlus启动报错:BeanNotOfRequiredTypeException
- 基于STM32和MQ-2传感器的物联网友好型烟雾报警系统
- 华为OD机试真题-文件缓存系统-2023年OD统一考试(C卷)
- python模块websockets,浏览器与服务器之间的双向通信