【正点原子】STM32电机控制应用学习笔记——6.BLDC直流无刷电机无感闭环控制
发布时间:2024年01月13日
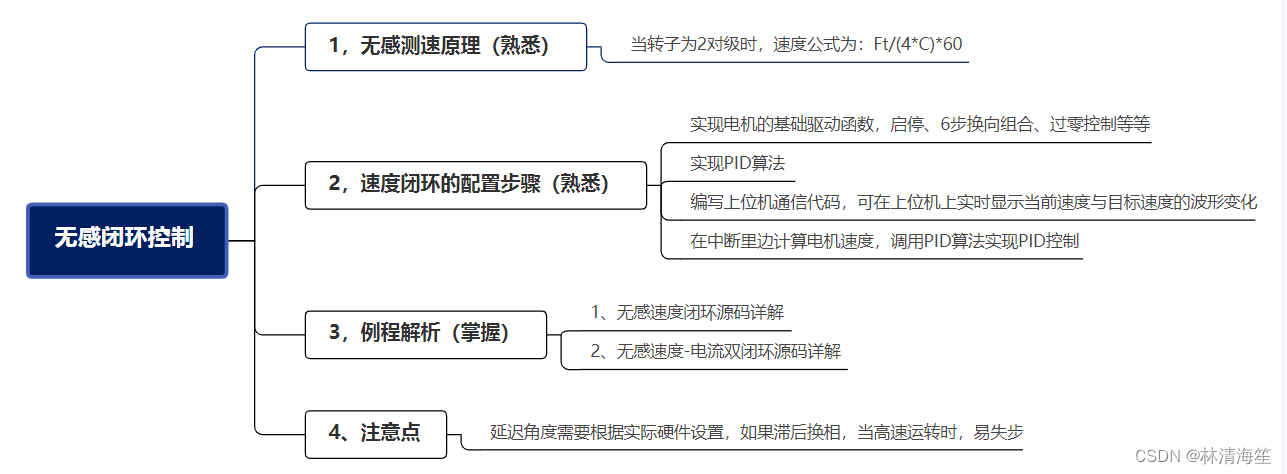
一.无刷无感测速原理(熟悉)
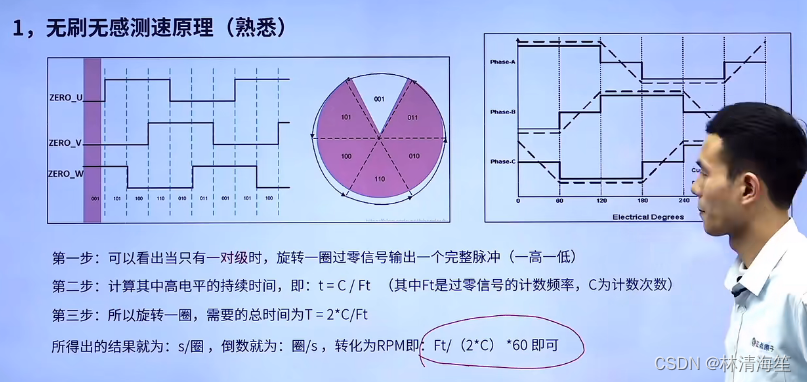
无感检测的是过零信号,测速只需要测一项即可。
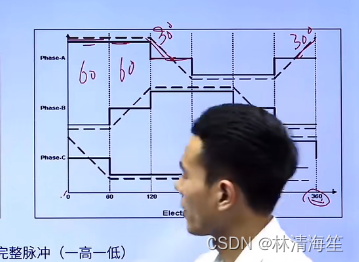
第一步,假设转子极对数只有一对极,此时旋转一圈过零信号就会输出一个完整的脉冲。图中是60度一个单位的电角度,高电平就是180度的电角度,低电平也是180度的电角度,整合起来就是六个,六步换向。
右图中,实线是电流,虚线是反电动势,这个图也是0-360度电角度一个周期的波形图。
过零信号是通过比较器输出的,输入端一端接的是反电动势,另一端接的是中性点。反电动势比中性点小的时候输出0,大于则输出1。
在这里0-360度是电角度,当只有一对极的时候,电角度和机械角度是相同的。
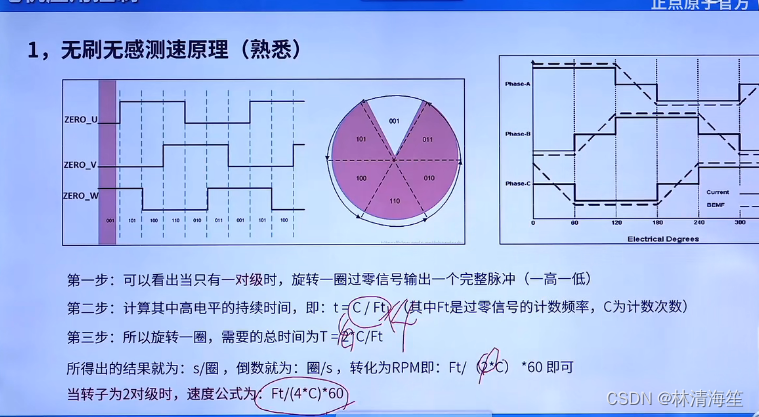
有一个公式是,电角度等于机械角度乘以极对数。

拿A相举例,在正的时候有60度+60度+30度,再加上后面的30度,加起来就是180度。所以高电平占用的就是180度。高电平和低电平都是占用180度电角度。
如果是两对极的情况,就是输出一高一低再输出一高一低了。所以电角度为720度。
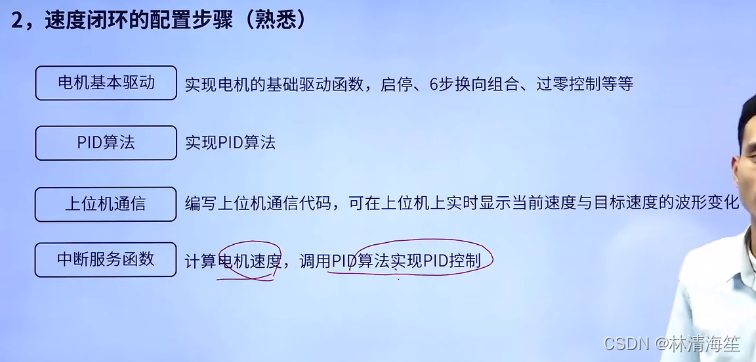
二.闭环控制的配置步骤(掌握)
三.例程解析(掌握)
四.课后总结(掌握)
文章来源:https://blog.csdn.net/weixin_65176607/article/details/135439324
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章