基于open3d的图像分割
发布时间:2024年01月23日
基础原理
ANSAC算法基于大数定律,通过概率的方式进行拟合。以RANSAC平面分割为例,考虑到三个点可以确定一个平面,RANSAC算法会随机选择三个点来构建一个平面,并通过判断点云中有多少个点落在这个平面上来评估平面的正确程度。当随机抽样的次数足够多时,我们可以较大概率获得所需的平面。平面方程可表示为:Ax + By + Cz + D = 0。
在点云处理中,open3d是一个常用的开源库,它提供了丰富的点云处理功能,包括点云分割。
open3d中的RANSAC分割平面函数为segment_plane,主要包含三个参数:
-
distance_threshold:定义一个点到估计平面的最大距离,距离内的点被认为是内点(inlier)。
-
ransac_n:定义用于随机抽样估计平面的点的个数。
-
num_iterations:定义随机平面采样和验证的频率(迭代次数)。
-
segment_plane函数会返回平面方程(A, B, C, D)以及内点索引的列表。
代码示例
pcd.paint_uniform_color(color=[0.5, 0.5, 0.5])
plane_model, inliers = pcd.segment_plane(distance_threshold=8, ransac_n=10, num_iterations=1000)
[A, B, C, D] = plane_model
print(f"Plane equation: {A:.6f}x + {B:.6f}y + {C:.6f}z + {D:.6f} = 0")
colors = np.array(pcd.colors)
colors[inliers] = [0, 0, 1] # 平面内的点设置为蓝色
pcd.colors = o3d.utility.Vector3dVector(colors)
inlier_cloud = pcd.select_by_index(inliers)
inlier_cloud.paint_uniform_color([0, 0, 1])
outlier_cloud = pcd.select_by_index(inliers, invert=True)
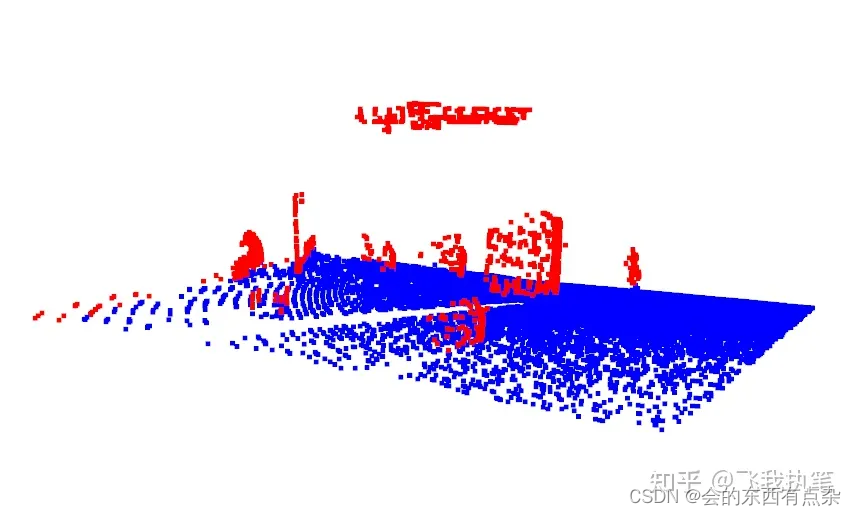
#显示去除极上极下分割后的图形
o3d.visualization.draw_geometries([inlier_cloud],window_name="去除极上极下的图") 示例图像
文章来源:https://blog.csdn.net/qq_20660115/article/details/135763316
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【论文阅读】Resource Allocation for Text Semantic Communications
- 【无标题】
- CISP-DSG证书含金量分析
- 图片去除水印:四种简便方法解析与操作步骤
- 如何在Java中加载两个类全限定名相同的类?
- 架构篇10:架构设计流程-识别复杂度
- [DevOps-05] Jenkins实现CI/CD操作
- 使用Spring Security实现SSO单点登录
- Pandas DataFrame中提取任意一个单元格的值
- 从代码到 NPM 名人堂:轻松发布你的创意