TOF激光导航避障雷达传感器DE系列连机配置与软件操作方法
TOF激光导航避障雷达传感器DE系列包含DE-4211、DE-4611、DE-4311、DE-4511等型号,是一款多线避障传感器,根据飞行时间(TOF 测量原理)运行,以均匀的时间间隔发射激光,激光光束遇到物体时 会反射回来,扫描传感器接收到反射的光束后,通过发射和接收的时间差来计算从激光传感器到物体 的距离,对周围进行二维扫描, 获得一个环境轮廓图形。广泛应用于AGV|RGV|AMB机器人等领域避障,导航,轮廓识别等。
本文重点介绍TOF激光导航避障雷达传感器DE系列连机配置与软件操作方法
1、传感器连接
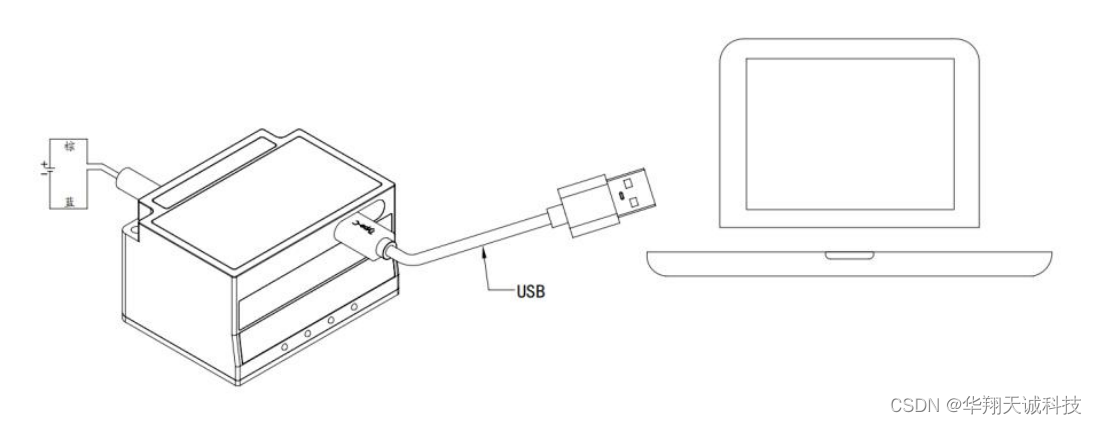
1.1、USB 连机说明
接入电源:DC24V±10%,在 AGV 系统内或者其他功率设备网络内,需要增加一个 DC24V 稳压设备, 确保电源部分干扰不会影响传感器正常运行。
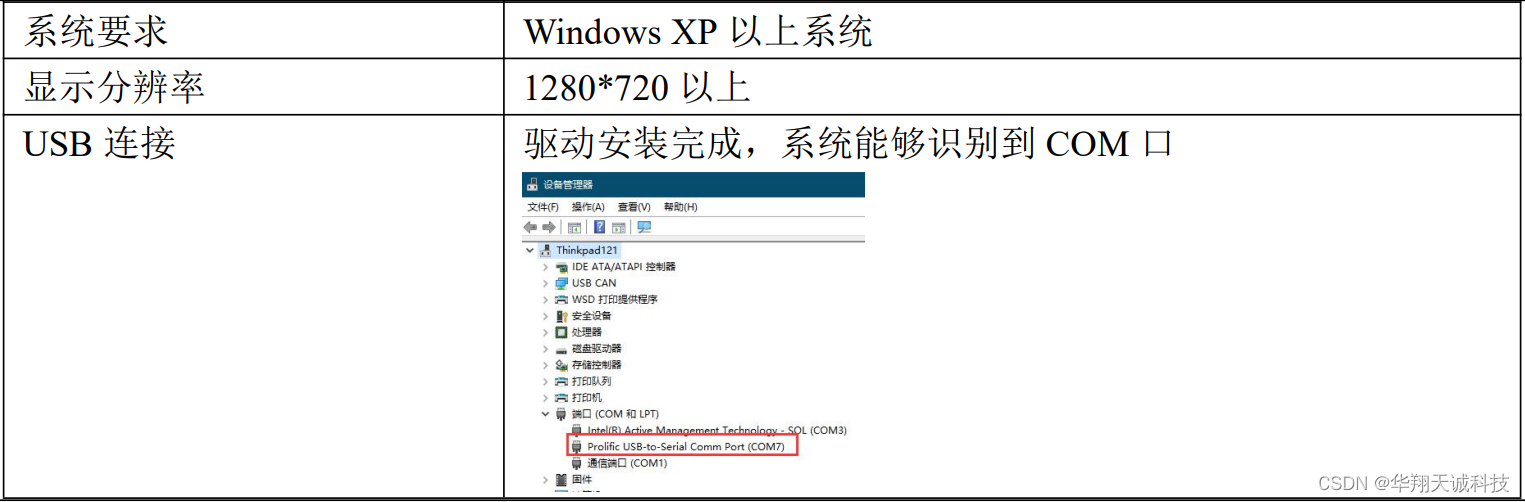
1.2、电脑端要求
1)Windows XP 以上系统;
2)端口类型为 USB-A--TYPE-C 端口;
3)支持 CP2102X 系列驱动
1.3、线缆要求
1) USB-TYPE-C 线缆必须使用可以数据传输功能;
2、配置软件操作
2.1、获取软件
1) 访问公司网站获取
2) 咨询销售和技术支持人员获取
2.2、软件运行环境
2.3、软件解压
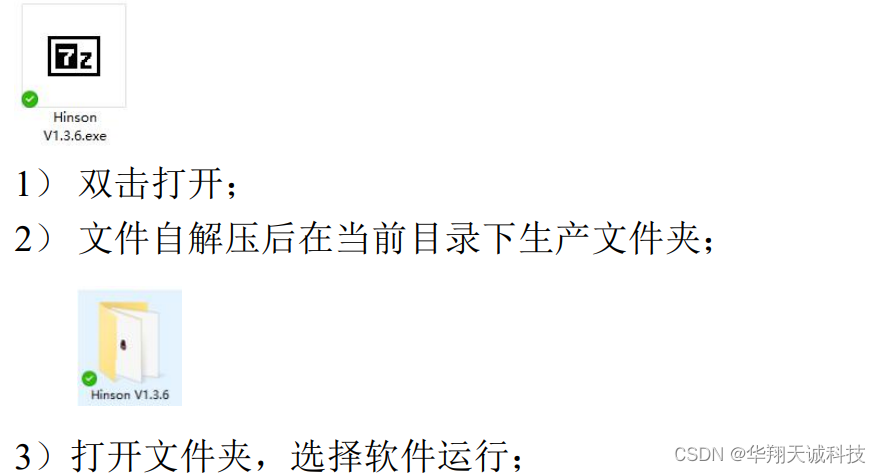
2.4、运行配置软件

3、配置软件界面介绍
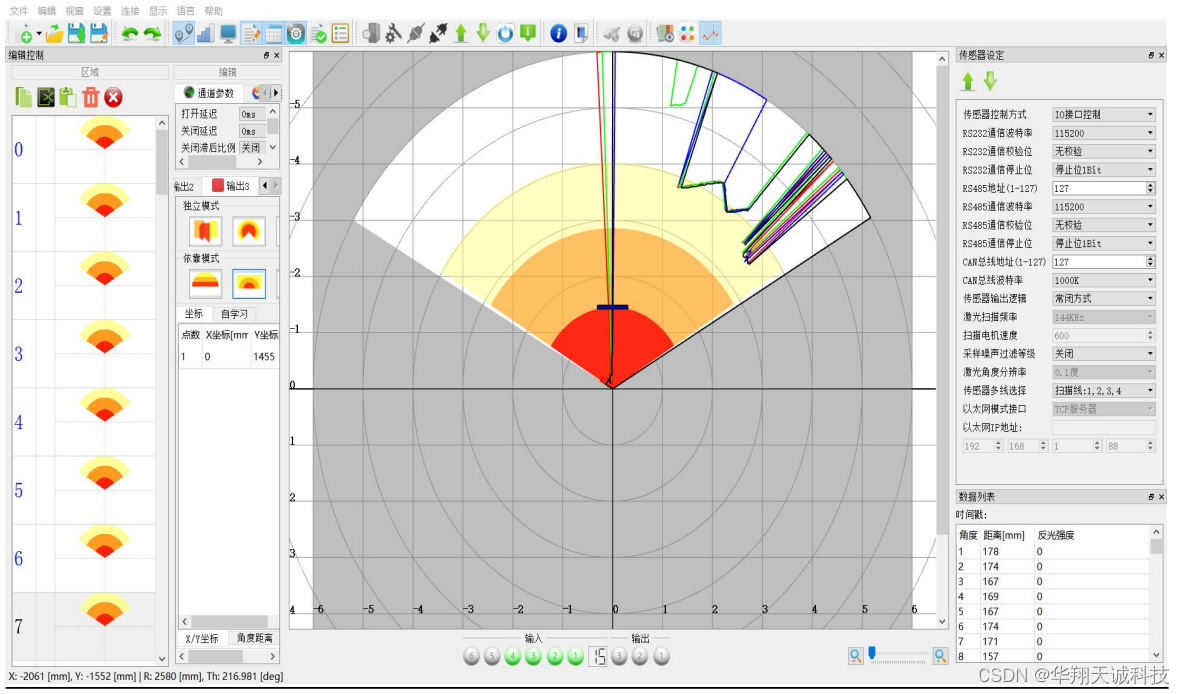
3.1、DE-42xxx/DE-46xxx 连接上配置软件之后显示如下界面
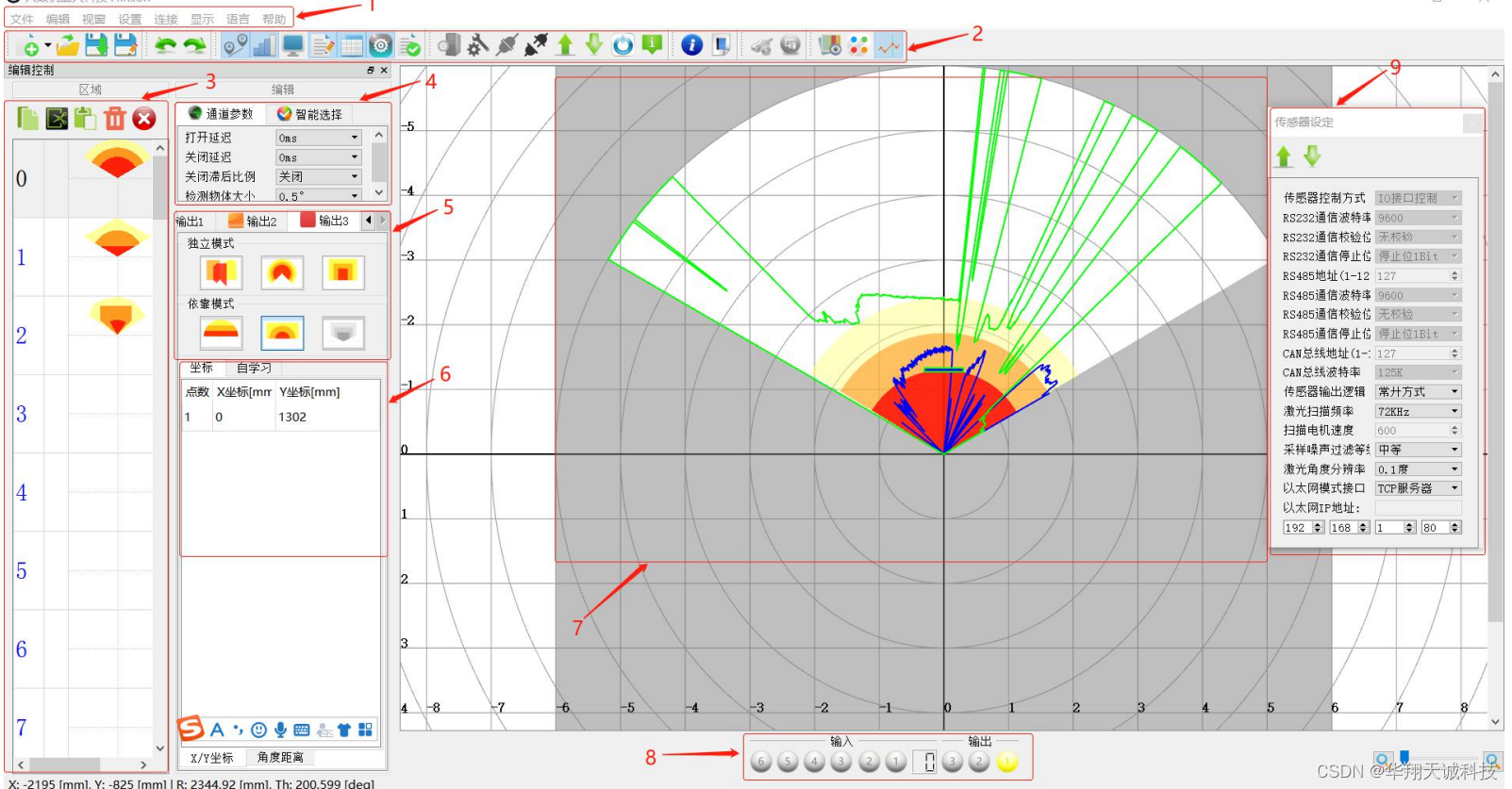
3.2、菜单栏




3.3、 快捷图标
所有快捷图标均在第 1 部分菜单栏中有解释。
3.4、检测通道图形编辑
DE-42xxx/DE-46xxx 支 持 0-15 号 检 测 通 道 , 每 个 检 测 通 道 均 支 持 3 个 检 测 区 域 检 测 图 形 输 出 , DE-42xxx/DE-46xxx 可以通过 IN1、IN2、IN3、IN4 的信号组合选择通道并输出通道的 OUT1、OUT2、OUT3 检 测区域是否有障碍物入侵。
3.5、?通道参数及智能选择
打开延时:0-500ms 可设定,当有瞬间干扰入侵导致传感器有输出时可适当设定打开延时的时间从而过滤掉 瞬间的干扰,注意该参数设定时需要选定通道,未被选定的通道该参数无效。
关闭延时:0-500ms 可设定,设定传感器端口关闭延时可以解决障碍物时有时无带来传感器输出端口频繁跳 变的问题,注意该参数设定时需要选定通道,未被选定的通道该参数无效。
关闭滞后比例:0-10%可设定,当障碍物处于检测的边沿位置跳动从而导致传感器输出端口频繁跳变时可设 定关闭滞后比例可解决传感器输出端口频繁跳变的问题,注意该参数设定时需要选定通道,未被选定的通 道该参数无效。
检测物体大小:0.5°-5°可设定,调整检测物体的大小可降低空气中灰尘或者传感器检测镜面不洁带来的 传感器误触发,注意该参数设定时需要选定通道,未被选定的通道该参数无效。
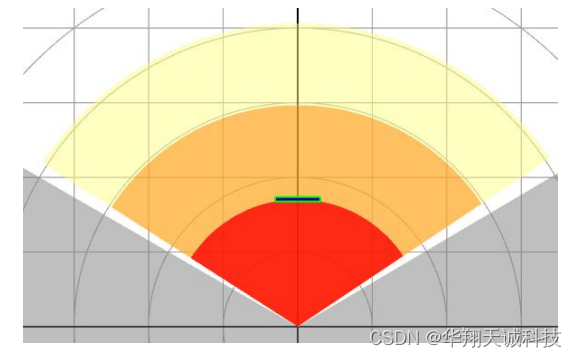
DE-42xxx/DE-46xxx 不可进行通道智能选择。 输出 1、输出 2、输出 3 编辑模式。 独立模式:独立模式:在独立模式下,可分别设置扇形及其矩形,绘制图形不能超过区间 120-240°。
依靠模式:
在设定好输出 1 的图形后,可以选择依靠模式按照不同比例复制输出 1 的图形。
坐标及其角度值:
独立模式下不规则图形各点的坐标(X、Y)
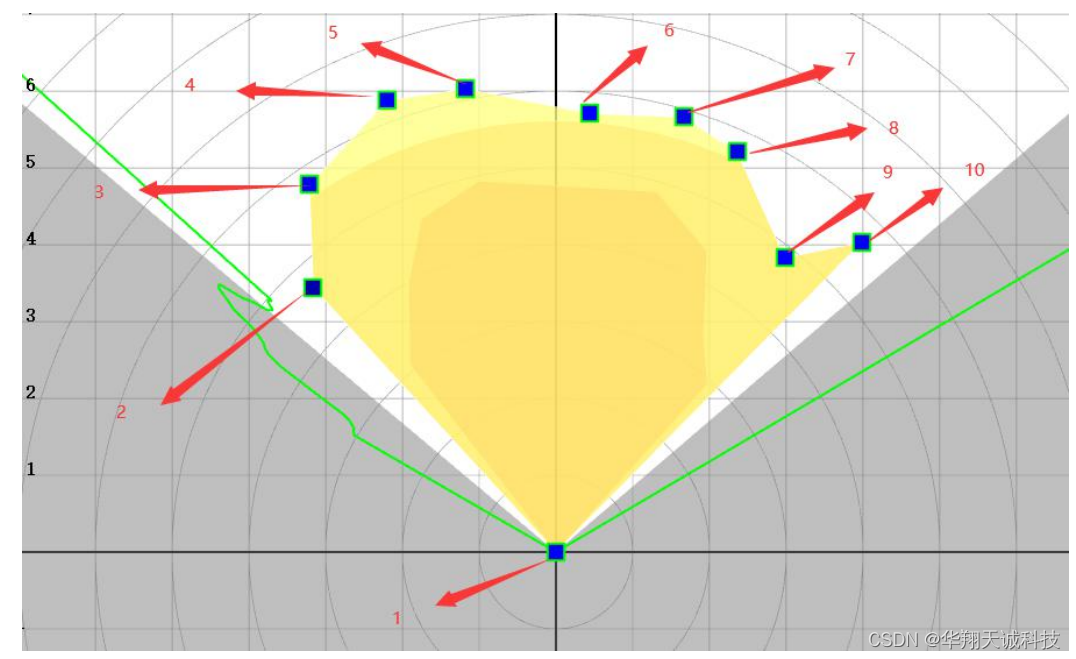
备注:第 1 点为坐标原点
独立模式下不规则形状各点与坐标原点的距离及其角度
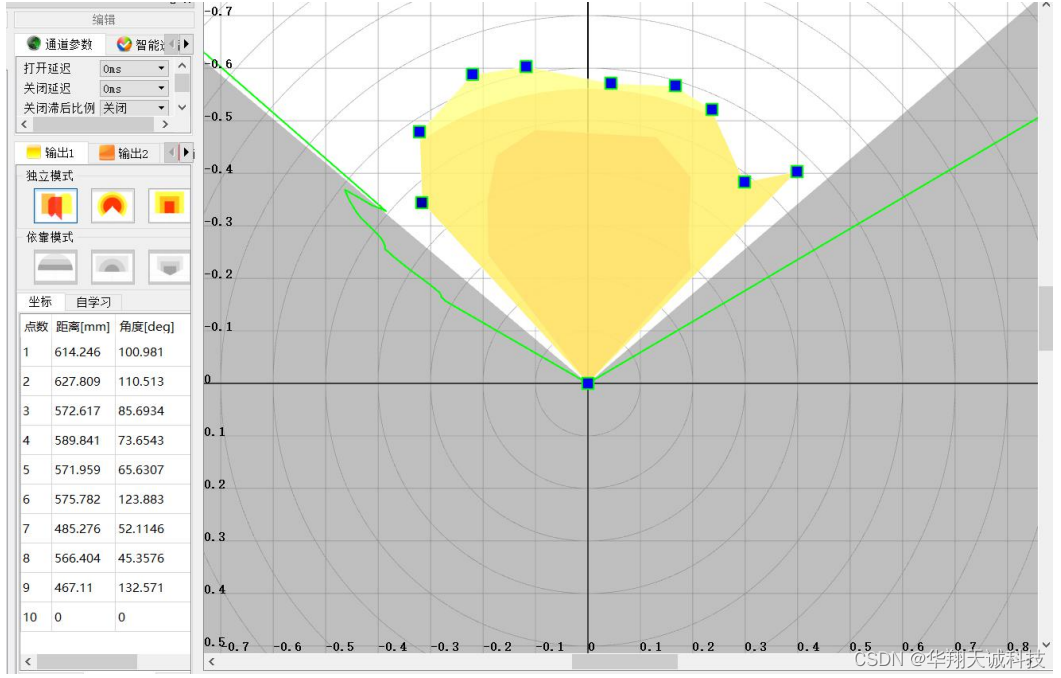
备注:第 1 点为坐标原点
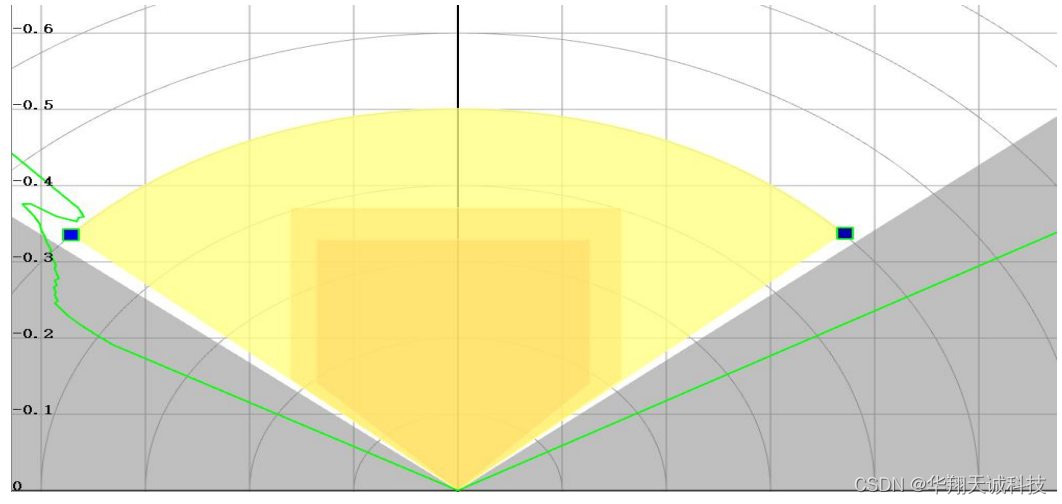
27 / 33 扫描轮廓、反光强度、检测通道图形显示区域:
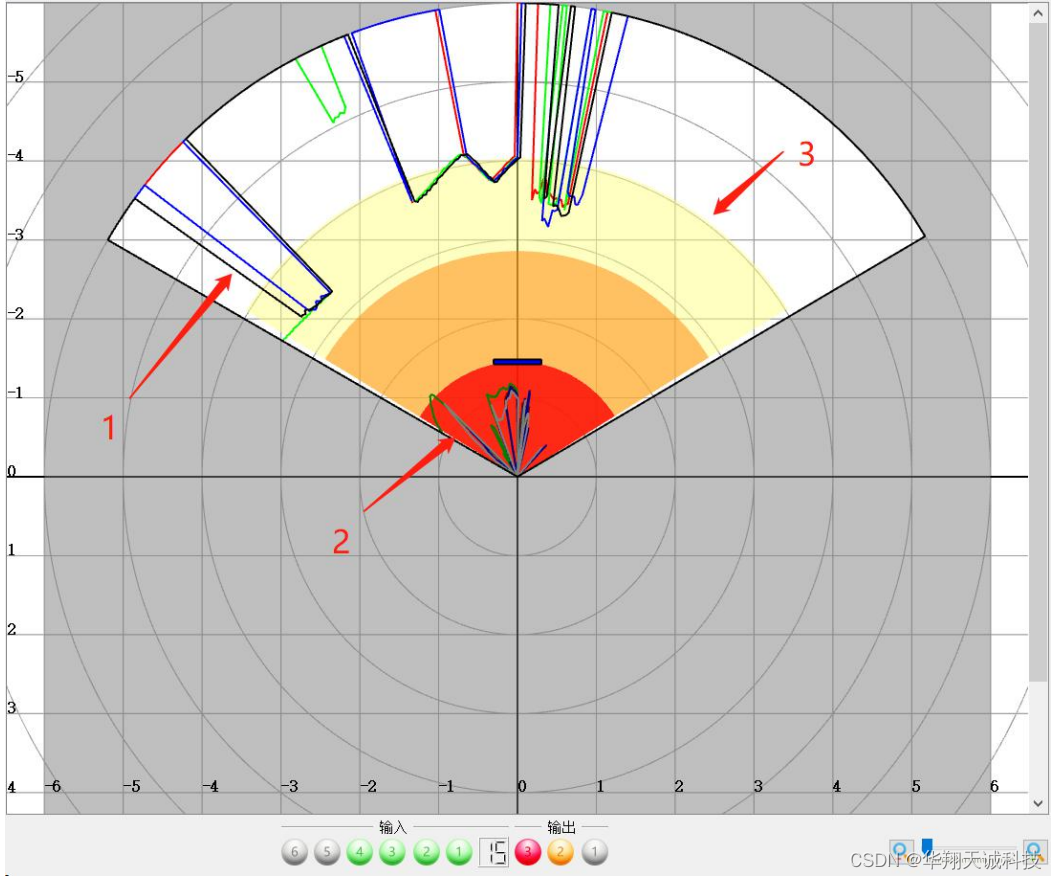
备注:
1 线条所示的是扫描轮廓
2 线条所示的是反光强度
3 是所设定的检测图形。
当前通道及当前通道输出 1(OUT1)、2(OUT2)、3(OUT3)状态
4、传感器参数设定
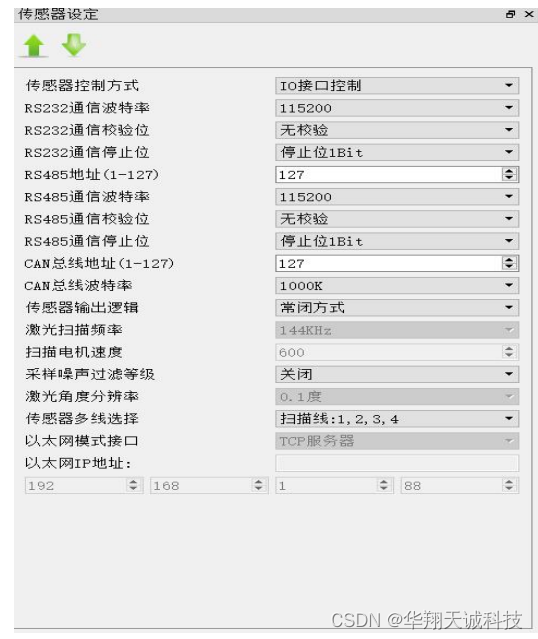
DE-42xxx/DE-46xxx 可设定的参数只有如下 3 项:
1、传感器输出逻辑为“常开方式”、“常闭方式”可设定;
2、采样噪声过滤等级为“关闭”、“简单”、“中等”、“严格”可设定,设置过滤等级可对传感器的检 测周边轮廓进行有效的滤波;
3、传感器多线选择为多种组合方式可根据实际应用选择。
更多关于TOF激光导航避障雷达传感器DE系列连机配置与软件操作方法,华翔天诚科技欢迎您的咨询与交流!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 苹果cmsV10蜘蛛统计插件+集合采集插件
- 案例067:基于微信小程序的小区租拼车管理信息系统
- 【Python_PySide6学习笔记(二十八)】基于PySide6实现移动窗体到屏幕中间位置
- GPT-4完全破解版:用最新官方API微调,想干啥就干啥,网友怕了
- JavaScript采集各大电商平台关于预制菜酸菜鱼销售量
- 第08章_面向对象编程(高级)(static,单例设计模式,理解mian方法,代码块,final,抽象类与抽象方法,接口,内部类,枚举类,注解,包装类)
- 使用【OpenI启智平台】进行模型训练
- Spring见解
- excel在扩展屏幕中显示有时候显示黑屏,这种怎么处理?
- 万兆网络之屏蔽线序接法(中)