鲁棒最小二乘法 拟合圆
发布时间:2023年12月22日
???????圆拟合算法_基于huber加权的拟合圆算法-CSDN博客
首次拟合圆得到采用的上述blog中的 K?sa Fit?方法。
该方法存在干扰点时,拟合得到的结果会被干扰。
首次拟合圆的方法




因此需要针对外点增加权重因子,经过多次迭代后,即可得到相对理想的结果。实验结果如下:
int main()
{
float CenterX = 100;
float CenterY = 100;
float Radius = 30;
Mat Image(Size(200, 200), CV_8UC3, Scalar(0, 0, 0));
// 生成符合要求的点
float dTheta = 2 * 3.1415926 / 30;
vector<Point> vecP;
for (size_t i = 0; i < 30; i++)
{
int x = CenterX + Radius * cos(i * dTheta) + rand() % 3;
int y = CenterY + Radius * sin(i * dTheta) + rand() % 4;
vecP.push_back(Point(x, y));
}
dTheta = 2 * 3.1415926 / 360;
for (size_t i = 0; i < 360; i++)
{
int x = 110 + 25 * cos(i * dTheta);
int y = 120 + 25 * sin(i * dTheta);
vecP.push_back(Point(x, y));
}
std::random_shuffle(vecP.begin(), vecP.end());
circleFittingIRLS(vecP, 5, CenterX, CenterY, Radius);
circle(Image, Point(int(CenterX), int(CenterY)), int(Radius), Scalar(50, 250, 250), 1);
for (size_t i = 0; i < vecP.size(); i++)
{
Image.at<Vec3b>(vecP[i].y, vecP[i].x)[0] = 150;
Image.at<Vec3b>(vecP[i].y, vecP[i].x)[1] = 150;
Image.at<Vec3b>(vecP[i].y, vecP[i].x)[2] = 150;
}
return 0;
}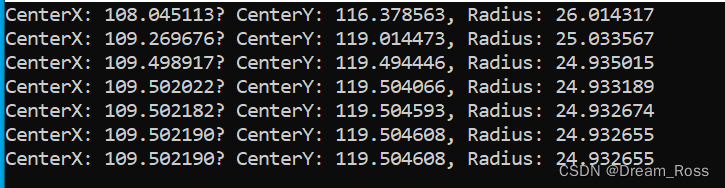

基于opencv实现的拟合算法,上图绘制时,将圆心位置取整后绘制的示意图,因此存在一定偏差。
权重迭代 最小二乘法 IRLS?
参考下面blog:
早看到这个就不写这个blog 了
文章来源:https://blog.csdn.net/lipeng19930407/article/details/135150941
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!