ROS2——发布和订阅
发布时间:2024年01月10日
现在我们以主题 int_topic 和发布者 publisher_node 和订阅者 subscriber_node 为例子进行展开。
头文件
在调用各种消息类型时,需要先引用头文件,才能成功声明某一个消息类型的变量。
我们在写头文件时,需要将该类成员的大写字母转换成小写,并在词汇间加_来达到引用的效果。
//For std_msgs/msg/Int32
#include "std_msgs/msg/int32.hpp"
std_msgs::msg::Int32 msg_int32;
// For sensor_msgs/msg/LaserScan
#include "sensor_msgs/msg/laser_scan.hpp"
sensor_msgs::msg::LaserScan msg_laserscan;
发布者
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/int32.hpp"
using namespace std::chrono_literals;
using std::placeholders::_1;
class PublisherNode:public rclcpp::Node
{
public:
PublisherNode():Node("publisher_node")
{
publisher_=create_publisher<std_msgs::msg::Int32>("int_topic",10);
timer_ =create_wall_timer(500ms,std::bind(&PublisherNode::timer_callback,this));
}
void timer_callback()
{
message_.data += 1;
publisher_->publish(message_);
}
private:
rclcpp::Publisher<std_msgs::msg::Int32>::SharedPtr publisher_;
rclcpp::TimerBase::SharedPtr timer_;
std_msgs::msg::Int32 message_;
};
int main(int argc,char *argv[])
{
rclcpp::init(argc,argv);
auto node=std::make_shared<PublisherNode>();
rclcpp:spin(node);
rclcpp::shutdown();
return 0;
}
呈现关系如下图所示
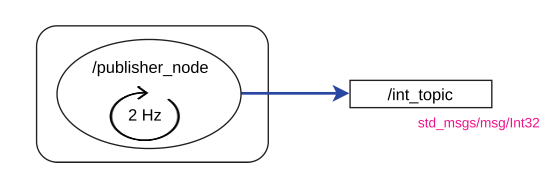
我们在上述程序中,我们使用 create_publisher<std_msgs::msg::Int32> 创建一个发布者,同时确定他发布的话题 int_topic ,如果该话题不存在,则创建该话题
在 main 中 auto node=std::make_shared<PublisherNode>(); 初始化节点,并在后续调用。
订阅者
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/int32.hpp"
using std::placeholders::_1;
class SubscriberNode : public rclcpp::Node
{
public:
SubscriberNode()
: Node("subscriber_node")
{
subscriber_ = create_subscription<std_msgs::msg::Int32>(
"int_topic", 10,
std::bind(&SubscriberNode::callback, this, _1));
}
void callback(const std_msgs::msg::Int32::SharedPtr msg)
{
RCLCPP_INFO(get_logger(), "Hello %d", msg->data);
}
private:
rclcpp::Subscription<std_msgs::msg::Int32>::SharedPtr subscriber_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
auto node = std::make_shared<SubscriberNode>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
关于 msg->data 的解释:这是在SubscriberNode::callback函数中访问std_msgs::msg::Int32类型消息中的data数据的方式。在ROS2中,std_msgs::msg::Int32是一个整数类型的消息,其中包含一个名为data的成员变量,通过msg->data可以访问这个成员变量的值。
具体来说,msg是一个指向std_msgs::msg::Int32类型的智能指针,它指向订阅到的消息。在函数中,通过msg->data的方式,获取了消息中的整数数据,并输出到日志中,方便调试和查看。
文章来源:https://blog.csdn.net/beiketaoerge/article/details/135514142
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Spark编程范例:Word Count示例解析
- 阿里巴巴旗下的 AI 平台 AIHub 提供多种免费的图片 AI 在线工具
- Win10 华硕笔记本只有飞行模式 WIFI 消失(仅供参考)
- 鸿蒙系列--属性动画
- 数学建模|通过模拟退火算法求解供应与选址问题:问题一(python代码实现)
- 七、Redis 缓存 —— 超详细操作演示!
- K8S四层代理Service-01
- 飞致云与上海吉谛达成战略合作,获得Gitea企业版中国大陆地区独家代理权
- 每日一题——LeetCode1189.气球的最大数量
- Nest 框架:解锁企业级 Web 应用开发的秘密武器(上)