OpenVINS学习3——初始化原理学习
一、OpenVINS初始化概述
VIO初始化的主要意义有:
(1)对齐相机的世界坐标系和惯性系,因此需要估计重力方向。
(2)为后续的VIO算法提供较为准确的初始参数和状态(尺度、IMU bias、初始速度),使得算法可以快速稳定地进入正常运行阶段。
良好的初始化对VIO算法的整体精度和鲁棒性至关重要。
目前OpenVINS包含视觉惯性系统的 StaticInitializer 和 DynamicInitializer 初始化代码。它将等待平台静止,然后初始化其在重力框架中的方向。
一般VIO初始化分为两种,一种是静态初始化,一种是动态初始化,而OpenVins则利用加速度的方差差异将运动分为两种状态,一种是静止的,一种是刚开始运动的。
VIO初始化就要任务一般是估计重力方向,速度,位置,IMU的偏置,尺度。而在openvins中,只估计重力方向,IMU的偏置。
在代码里主要写了三个初始化模式:
1) GroundTruth初始化
2 )静止初始化
3 )动态初始化
关于静止初始化,可以参考不一样的静态初始化——OpenVins-CSDN博客
如果平台初始时不是静止的,那么我们利用动态初始化来尝试恢复初始状态。这是Estimator Initialization in Vision-aided Inertial Navigation with Unknown Camera-IMU Calibration的实现,它通过首先创建一个用于恢复速度、重力和特征位置的线性系统来解决初始化问题。初始恢复后,执行全面优化以允许协方差恢复。
Estimator Initialization in Vision-aided Inertial Navigation with Unknown Camera-IMU Calibration论文阅读博客:
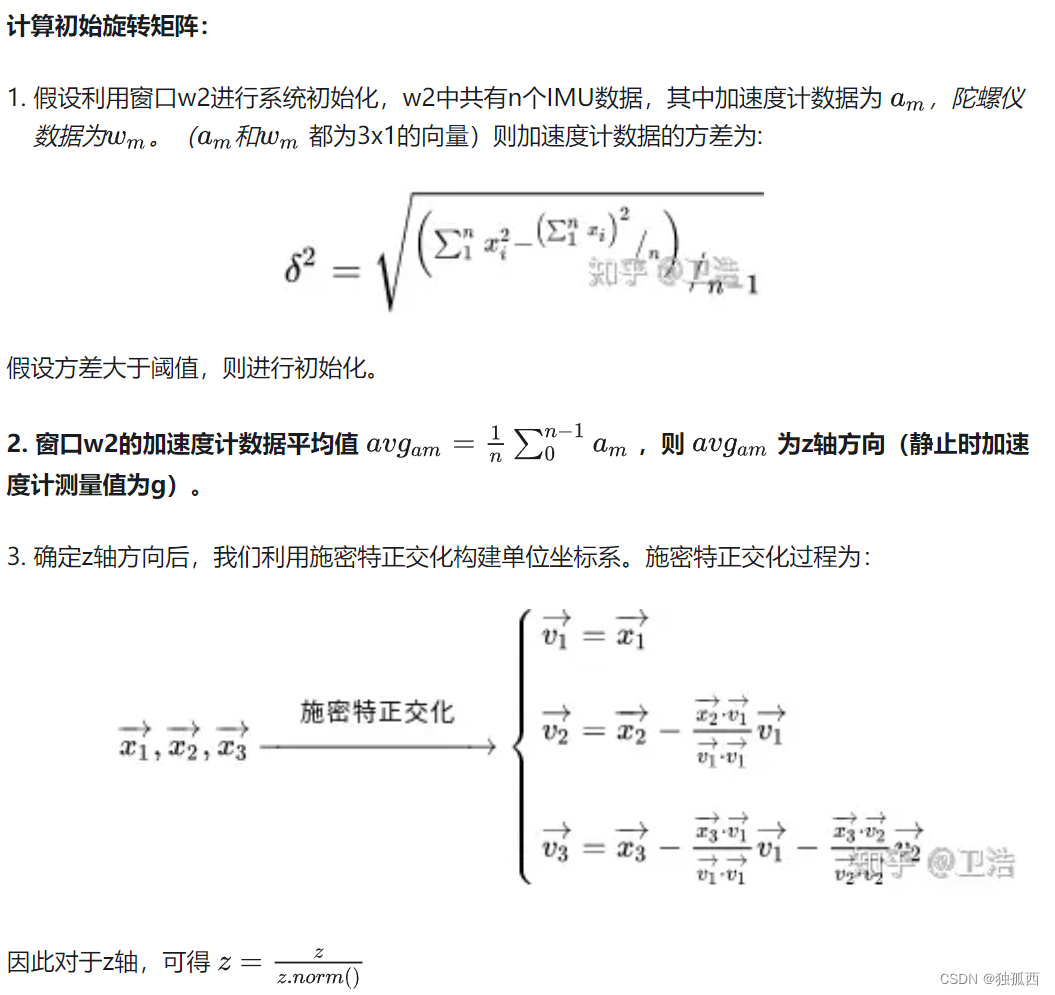
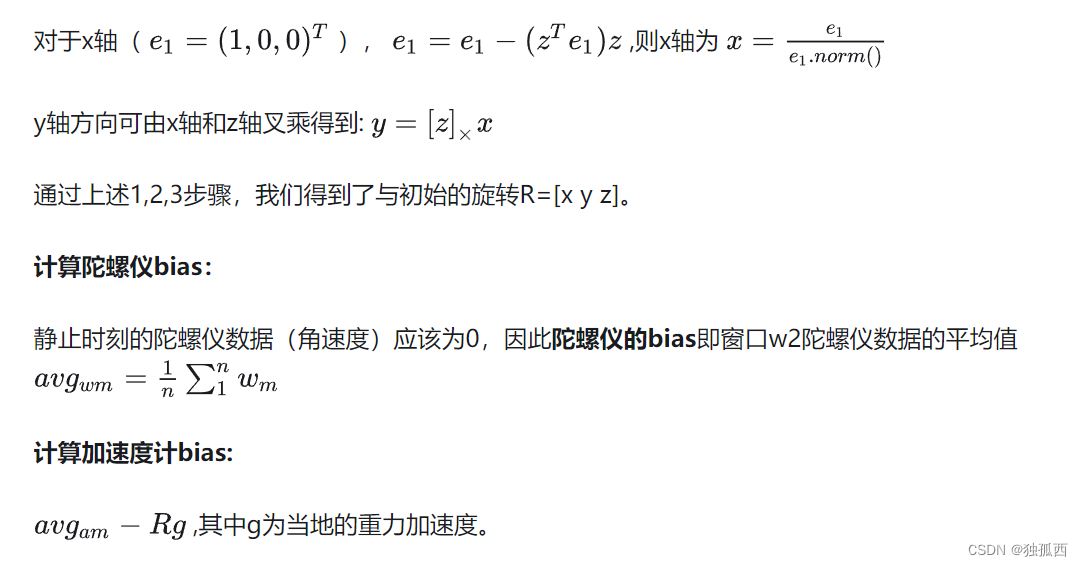
二、静态初始化原理
三、动态初始化原理
视觉惯性导航系统( VINS )的一个基本问题是其状态初始化。也就是说,恢复给定惯性和视觉方位测量的初始可观测状态。众所周知,VINS具有4个自由度的不可观测方向,对应于全局的偏航和位置[ 1 ]。这意味着其他参数是可观测的,因此,在给定惯性和视觉测量读数的情况下,它们是可恢复的。状态初始化的挑战是在没有任何先验知识的情况下,通过构造一个线性系统来恢复这些可观测参数。这并不简单,因为定向是非线性的,因此如果没有近似和技巧,很难定义这样的线性问题。接下来,在Dong - Si和穆里基斯工作的基础上,给出了问题的闭式解,并定义了一个二次约束最小二乘问题[ 2、3]。另外一个重点是,希望恢复初始状态协方差,以便用于基于滤波器的视觉惯性扩展卡尔曼滤波器OpenVINS [ 4 ]。
1、最小二乘方程构建
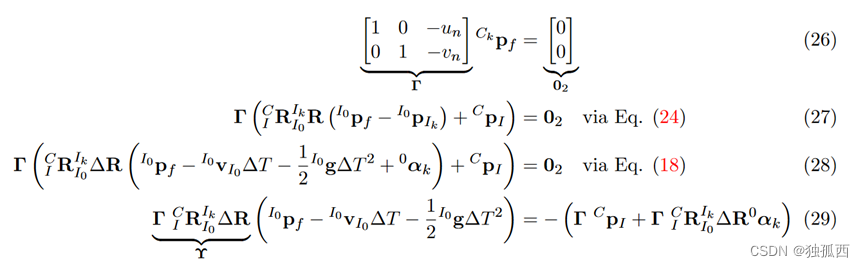
利用IMU模型和相机模型,从相机归一化平面的坐标等式出发,利用IMU提供的姿态信息,以特征点全局位置、IMU速度、重力加速度为因变量,列出形如Ax=b的方程。

如果有五个以上的框架,就可以恢复上述的线性系统(即当N = 5时, 2N≥9 )。如果重力被限制在一个已知的量级,那么这就减少了自由度,因此只需要四个观测值(即当N = 4时,满足2N≥8)就可以恢复状态。这与[ 2、3]中的结果不同,因为没有尝试将相机外参恢复到IMU变换中。该系统可以对所有特征观测值进行叠加,同时增加了系统的鲁棒性。
加上重力加速度的约束,再利用拉格朗日乘子法,得到新的无约束问题,对该多项式的伴随矩阵进行特征分解,可以找到该多项式的根(从而解得)。



恰好满足约束的最小λ解将给出最优解:

现在希望恢复每个相机时间步的惯性状态,这将作为下一部分非线性优化的初始猜测。利用惯性传播,可以恢复每个时刻的惯性状态:
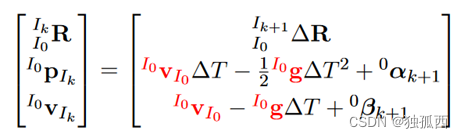
用红色突出了从约束最小二乘中恢复的分量和?T从t0时刻到tk时刻。现在希望将第一参照系与引力参照系对齐。这意味着将计算一个框架{ G },使得重力为Gg = [ 0 0 ?9 . 81] ,其位置和偏航在{ I0 }原点。利用施密特正交方法把全局坐标系和惯性坐标系进行对齐。可以发现其z轴沿重力方向的旋转为:
![]()
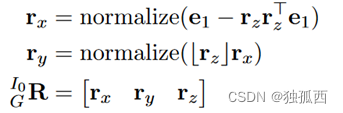

至此,初始化估计重力方向这个问题解决。
2、精细化
利用线性系统,我们恢复了状态的一个初始猜测。在此,希望对估计值进行精化,使其更接近真实值,并恢复初始状态的协方差。这个过程还将考虑到系统的噪声特性,使得每个测量相对于其传感器的精度是加权的。可以定义下面希望优化的状态

其中在每个成像时间步都有C个惯性状态,和N个环境特征。可以定义如下带有惯性,相机和先验因子的优化问题:

?



四、代码解析
OpenVINS的初始化代码在ov_init文件夹下,主要分为静态初始化和动态初始化两部分。下一个博客重点写一下初始化代码得到结构功能,写一个详尽的注释。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!