Open3D 点云下采样抽稀(7)
发布时间:2024年01月08日
一、算法介绍
点云抽稀在计算机图形学和计算机视觉中有着广泛的应用,其作用包括但不限于以下几点:
数据压缩: 点云抽稀可以有效地减少点云数据量,从而节省存储空间和降低数据传输成本。
加速处理: 较为密集的点云通常需要更多的计算资源进行处理,抽稀可以减少数据点的数量,从而加快处理速度和提高计算效率。
去除噪声: 一些点云数据可能受到噪声的影响,通过抽稀可以去除一些无意义的离散噪声点,使得数据更加干净。
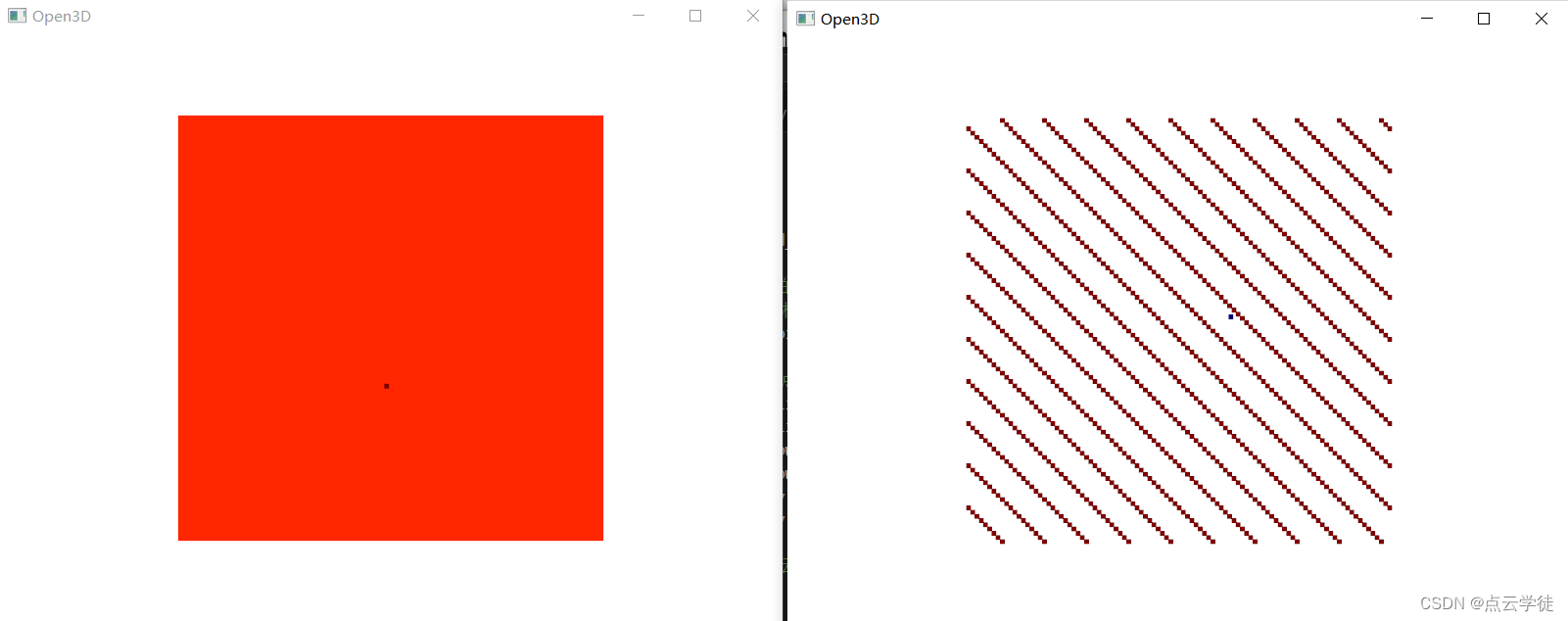
可视化优化: 在进行点云可视化时,过于密集的点云可能会导致可视化效果混乱,抽稀可以使可视化结果更清晰易懂。
简化模型: 对于点云表示的三维模型,抽稀可以简化模型并减少细节,使得模型更易处理和渲染。
总的来说,点云抽稀可以通过减少数据量、加快处理速度、去除噪声等方式,对点云数据进行预处理和优化,以满足不同应用场景下的需求。
二、算法实现
1.代码
代码如下(示例):
import open3d as o3d
# 读取点云数据
point_cloud = o3d.io.read_point_cloud("D:\\shuju\\原始点云.pcd")
# 设置均匀采样(半径滤波)的参数
# 这里以每10个点进行一次采样为例
filtered_point_cloud = point_cloud.uniform_down_sample(every_k_points=10)
# 创建可视化窗口并添加原始点云和滤波后的点云
vis_original = o3d.visualization.Visualizer()
vis_filtered = o3d.visualization.Visualizer()
vis_original.create_window(width=800, height=600)
vis_filtered.create_window(width=800, height=600)
vis_original.add_geometry(point_cloud)
vis_filtered.add_geometry(filtered_point_cloud)
# 显示原始点云和滤波后的点云
vis_original.run()
vis_filtered.run()
# 写出滤波后的点云数据
o3d.io.write_point_cloud("D:\\shuju\\结果点云.pcd", filtered_point_cloud)
文章来源:https://blog.csdn.net/weixin_44329757/article/details/135466783
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 自创题目——贴对联
- 一种安防场景下融合注意力机制和时空图卷积神经网络的人体动作识别方法与流程
- 2024.1.9每日一题
- Java面试题之JVM
- OpenCV第 2 课 OpenCV 环境搭建
- 从js闭包谈到作用域、作用域链、执行上下文、内存管理
- C 库函数 - gmtime()
- 一招搞定msvcr100.dll缺失问题,msvcr100.dll丢失的多种解决方法
- 应用在植物生长照明中的LED照明灯珠
- uniapp如何封装接口