(二)基于wpr_simulation 的Ros机器人运动控制,gazebo仿真
发布时间:2024年01月19日
一、创建工作空间
????????
mkdir catkin_ws
cd catkin_ws
mkdir src
cd src二、下载wpr_simulation源码
git clone https://github.com/6-robot/wpr_simulation.git
三、编译
- ~/catkin_make ?目录下catkin_make
- source devel/setup.bash
四、运行
roslaunch wpr_simulation wpb_simple.launch

启动另一个终端,执行:
rosrun rqt_robot_steering rqt_robot_steering
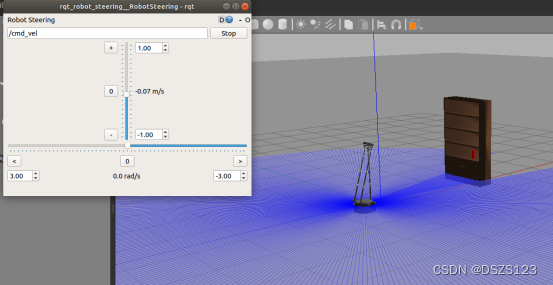
鼠标改变速度和角度值,仿真机器人发生位姿变化。
文章来源:https://blog.csdn.net/dongshizhishui/article/details/135706916
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【漏洞利用】One-Fox综合工具箱 v6.0 公开版——最强单兵作战工具箱
- 采用ODP.NET 批量进行数据同步
- springboot 动态代理
- Web前端与低代码可以碰出什么火花?
- 基于SpringBoot+Vue的家具销售管理系统
- [oeasy]python005_退出游乐场_重启游乐场_系统态shell_应用态_quit
- 【Apollo】阿波罗使用占位符 #{} 的异常分析
- vue同一个浏览器登录不同账号数据覆盖问题解决
- 【微信小程序独立开发1】项目提出和框架搭建
- Docker常用命令