opencv#28 图像卷积
图像卷积
图像卷积是图像处理中最为基础的操作之一,其常用在图像的边缘检测,图像的去噪声以及图像压缩等领域。
图像卷积主要步骤:
Step1:将卷积模板旋转180°。
Step2:卷积模板移动到对应位置。
Step3:模板内求和,保存求和结果。
Step4:滑动卷积模板,处理所有结果。
? 卷积函数在这里称卷积模板,卷积模板通常是一个方形的卷积,同时也是一个奇数的卷积,卷积模板通常使用的是一个中心对称的形式。
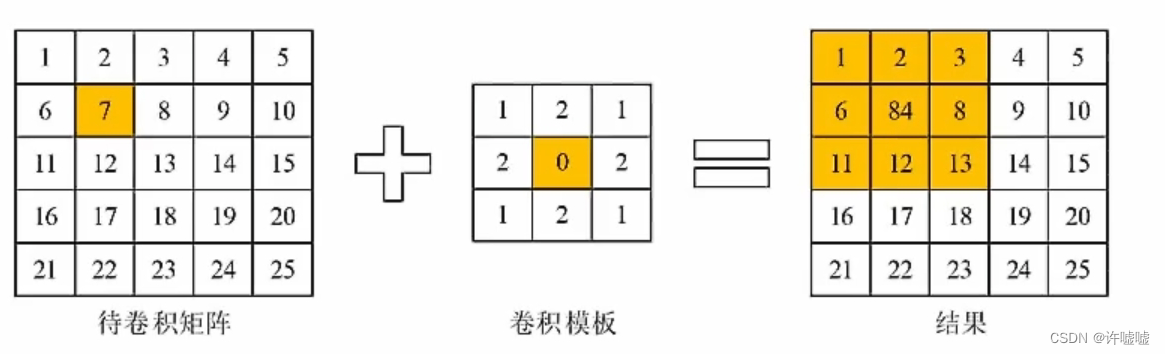
? 例如上图,在将模板旋转180°时,需要确定一个旋转中心,也就是我们卷积模板的中心,围绕这个中心旋转180°得到的结果便是我们需要进行卷积操作的结果。由于,我们常用的卷积模板是一个中心对称的模板,所以我们常看到在进行卷积时,无需进行180°的操作,?但是,我们要清楚,卷积首先重要的第一步是对模板进行旋转,否则,当我们使用非中心对称模板的时候,那么我们再对卷积模板进行旋转之后,得到的结果与原结果不一致,此时进行卷积旋转和不旋转的结果时不同的,之后将我们的模板移动到需要进行卷积图像或矩阵的对应位置,例如上图,我们将模板移动到像素值为7的中心区域上,我们将卷积模板完整覆盖在此区域上,第三步,将模板覆盖的区域与模板求和,首先是对应位置求乘积 ,也就是1*1+2*2+3*1....依次相乘再相加,得到的结果便是我们卷积之后的结果,将此结果替换掉原先待卷积矩阵中,这样得到的结果便是我们卷积之后的矩阵的结果。之后将卷积模板移动到下一位,也就是将中心位置覆盖在像素值为8的区域,继续对应位置相乘再相加得到的结果为96,这个96就替换掉原先图像中的8,依次运行下去,每一步都进行替换。? ?这里可以发现,在移动的时候,我们的中心像素只能覆盖我们原先像素的中心位置,其边缘位置是没有办法进行处理的,如上图,我们卷积后的结果只有中心3*3的像素进行了改变,而其他周围的像素是没有进行改变的,我们知道,对于图像来说,最边缘的一行和一列像素对图像整体的信息表达没有太多的作用,但是有的时候我们依然想得到一个边缘经过处理的结果,因此,我们将原图像边缘进行扩充一行一列像素,那么此时再进行卷积运算时,我们的卷积模板中心就可以覆盖在我们原图像中最边缘区域上,这样,我们可以在边缘上依次移动,得到结果,这里面对于边缘填充有很多种方法,例如,可以用全是0来填充,也可以复制最边缘的值进行填充。当我们的卷积模板为5*5的形式,那么我们对于边缘扩充就要两行两列,这样才能保证最边缘的图像能够被我的卷积模板中心所覆盖。
? 可以发现,进行卷积后,像素值变得很大,扩大了很多倍数,若像素值是0~255之间,当中心像素为25时,可能计算结果就会超过最大值,那么就会影响卷积结果,因此在卷积操作的时候,我们还需要进行归一化的操作,就是将卷积模板进行归一化,将模板中每一个数除以模板中所有系数之和得到归一化后的结果,这样得到的结果就可以保证不会经过卷积后数值不会越界。
图像卷积函数
filter2D()
void cv::filter2D(InputArray src,
OutputArray dst,
int ddepth,
InputArray kemel,
Point anchor = Point(-1,-1),
double deta = 0,
int borderType = BORDER_DEFAULT
)·src:输入图像。
·dst:输出图像,与输入图像具有相同的尺寸和通道数。(经过卷积后的图像,由于卷积运算可能会出现小数,因此输入和输出图像的数据类型可能会不同)
·ddepth:输出图像的数据类型(深度),根据输入图像的数据类型不同拥有不同的取值范围。(例如输入图像是8U形式,那么输出图像就可包含8U,但是若输入的是一个32F的形式,那么输出图像中就不可能包含8U形式,因为经过处理后得到的结果精度一定比没有经过处理的精度高。)
·kernel:卷积核(卷积模板),CV_32FC1(浮点类型单通道矩阵)类型的矩阵(通常矩阵形式是一个奇数的正方形矩阵)。
·anchor:内核的基准点(锚点),默认值(-1,-1)代表内核基准点位于kernel的中心位置。
·delta:偏值,在计算结果中加上偏值(默认情况下此值为0,也就是卷积后的结果是没有进行偏移的)。
·borderType:像素外推法选择标志(也就是对图像进行外围扩充的形式)。
在了解上函数后,发现并没有进行卷积模板的旋转,因此我们需要人在进行卷积函数时,人为旋转180°。
示例
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv; //opencv的命名空间
using namespace std;
//主函数
int main()
{
//待卷积矩阵
uchar points[25] = { 1,2,3,4,5,
6,7,8,9,10,
11,12,13,14,15,
16,17,18,19,20,
21,22,23,24,25 };
Mat img(5, 5, CV_8UC1, points);
//卷积模板(需要32FC1形式,所以要设置为float)
Mat kernel = (Mat_<float>(3, 3) << 1, 2, 1,
2, 0, 2,
1, 2, 1);
Mat kernel_norm = kernel / 12;//卷积模板归一化
Mat result, result_norm; //未归一化的卷积结果和归一化的卷积结果
filter2D(img, result, CV_32F, kernel, Point(-1, -1), 2, BORDER_CONSTANT);
filter2D(img, result_norm, CV_32F, kernel_norm, Point(-1, -1), 2, BORDER_CONSTANT);
cout << "result" << endl << result << endl;
//图像卷积
Mat lena = imread("E:/opencv/opencv-4.6.0-vc14_vc15/opencv/lenac.png");
if (lena.empty())
{
cout << "请确认图像文件名称是否正确" << endl;
return -1;
}
Mat lena_filter;
filter2D(lena, lena_filter, -1, kernel_norm, Point(-1, -1), 2, BORDER_CONSTANT);
imshow("lena_filter", lena_filter);
waitKey(0);//等待函数用于显示图像
return 0;
}运行程序后,发现图像卷积最大的作用是可以对图像进行模糊,模糊的作用可以减小噪声,同时也可以增加后续处理的精度,这里面虽然进行了边缘扩充,但是对于整个图像来说并没有影响我们观看图像所能获得的信息。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!