RTKLIB命令行指令介绍
1.manual_2.4.2原文:
1.1SYNOPSIS
rnx2rtkp [option?...]?file file [...]
1.2DESCRIPTION
Read RINEX OBS/NAV/GNAV/HNAV/CLK, SP3, SBAS message log files and compute receiver (rover) positions and output position solutions.
The first RINEX OBS file shall contain receiver (rover) observations. For the relative mode, the second RINEX OBS file shall contain reference (base station) receiver observations. At least one RINEX NAV/GNAV/HNAV file shall be included in input files. To use SP3 precise ephemeris, specify the path in the files. The extension of the SP3 file shall be?.sp3?or .eph. All of the input file paths can include wild-cards (*). To avoid command line deployment of wild-cards, use "..." for paths with wild-cards.
Command line options are as follows ([]:default). With -k option, the processing options are input from the configuration file. In this case, command line options precede options in the configuration file. For the configuration file, refer B.4.
1.3OPTIONS
-?? ? ? ? ? ? print help
-k file ? ? ?input options from configuration file [off]
-o file? ? ? set output file [stdout]
-ts ds ts? start day/time (ds=y/m/d ts=h:m:s) [obs start time]
-te de te? ?end day/time ??(de=y/m/d te=h:m:s) [obs end time]
-ti tint? ? ? ? time interval (sec) [all]
-p mode ??mode (0:single,1:dgps,2:kinematic,3:static,4:moving-base,
?????????????????5:fixed,6:ppp-kinematic,7:ppp-static) [2]
-m mask ??elevation mask angle (deg) [15]
-f freq? ? ? ?number of frequencies for relative mode (1:L1,2:L1+L2,3:L1+L2+L5) [2]
-v thres? ??validation threshold for integer ambiguity (0.0:no AR) [3.0]
-b? ? ? ? ? ? ? backward solutions [off]
-c? ? ? ? ? ? ? forward/backward combined solutions [off]
-i? ? ? ? ? ? ? instantaneous integer ambiguity resolution [off]
-h? ? ? ? ? ? ?fix and hold for integer ambiguity resolution [off]
-e? ? ? ? ? ? ?output x/y/z-ecef position [latitude/longitude/height]
-a? ? ? ? ? ? ?output e/n/u-baseline [latitude/longitude/height]
-n ????????????output NMEA-0183 GGA sentence [off]
-g? ? ? ? ? ? ?output latitude/longitude in the form of ddd mm ss.ss [ddd.ddd]
-t? ? ? ? ? ? ? output time in the form of yyyy/mm/dd hh:mm:ss.ss [sssss.ss]
-u? ? ? ? ? ? ?output time in utc [gpst]
-d col? ? ? ? number of decimals in time [3]
-s sep? ? ? ?field separator [' ']
-r x y z? ? ? reference (base) receiver ecef pos (m) [average of single pos]
-l lat lon hgt reference (base) receiver latitude/longitude/height (deg/m)
-y level? ? ? output solution status (0:off,1:states,2:residuals) [0]
-x level? ? ? debug trace level (0:off) [0]
1.4EXAMPLES
Example 1. Kinematic Positioning, L1+L2, output Latitude/Longitude/Height to STDOUT.
> rnx2rtkp 07590920.05o 30400920.05o 30400920.05n
Example 2. Single Point Positioning, El Mask=15deg, output NMEA GGA to file out.pos
> rnx2rtkp -p 0 -m 15 -n -o out.pos 07590920.05o 30400920.05n
Example 3. Static Positioning, L1, time form yyyy/mm/dd hh:mm:ss, output X/Y/Z-ECEF positions
> rnx2rtkp -p 3 -f 1 -t -e 07590920.05o 30400920.05o 30400920.05n
Example 4. Kinematic Positioning, Instantaneous AR, validation threshold=2, comma separator
> rnx2rtkp -i -v 2 -s , 07590920.05o 30400920.05o 30400920.05n
2.manual_2.4.2译文
2.1说明
rnx2rtkp [option?...]?file file [...]
//在Visual Stdio中输出调试命令时,不需要在最前面写上rnx2rtkp
个人命令示例如下:
-x 5 -m 15 -k E:\\RTKLIB_2023_12_11\\a_Data\\playground_data\\rtk.conf -r -2171494.9816 4385377.6776 4077139.9056 -o
E:\\RTKLIB_2023_12_11\\a_Data\\playground_data\\out.pos E:\\RTKLIB_2023_12_11\\a_Data\\playground_data\\Playgroundrover.obs E:\\RTKLIB_2023_12_11\\a_Data\\playground_data\\Playgroundbase.obs E:\\RTKLIB_2023_12_11\\a_Data\\playground_data\\brdm1110.22p
上述命令解析:
-x 5 :日志文件级别水平,设置为5
-m 15:高度角截止角设置为15°
-k E:\\...\\rtk.conf:从文件中读取配置文件参数(如果与命令行参数相冲突,则优先读取命令行)
-r?-2171494.9816 4385377.6776 4077139.9056:参考站(基准站)接收机在ecef框架下的坐标为(xyz):2171494.9816 4385377.6776 4077139.9056
-o E:\\...\\out.pos:设置输出文件的名称和位置
后面三个文件依次是:(当同时给出流动站和基准站数据之后,就会进入RTK的相对定位模式)
第一个是接收机(流动站)的观测数据;
第二个是基准站(基站)接收机的观测数据;
第三个是卫星的导航电文文件/导航星历文件。
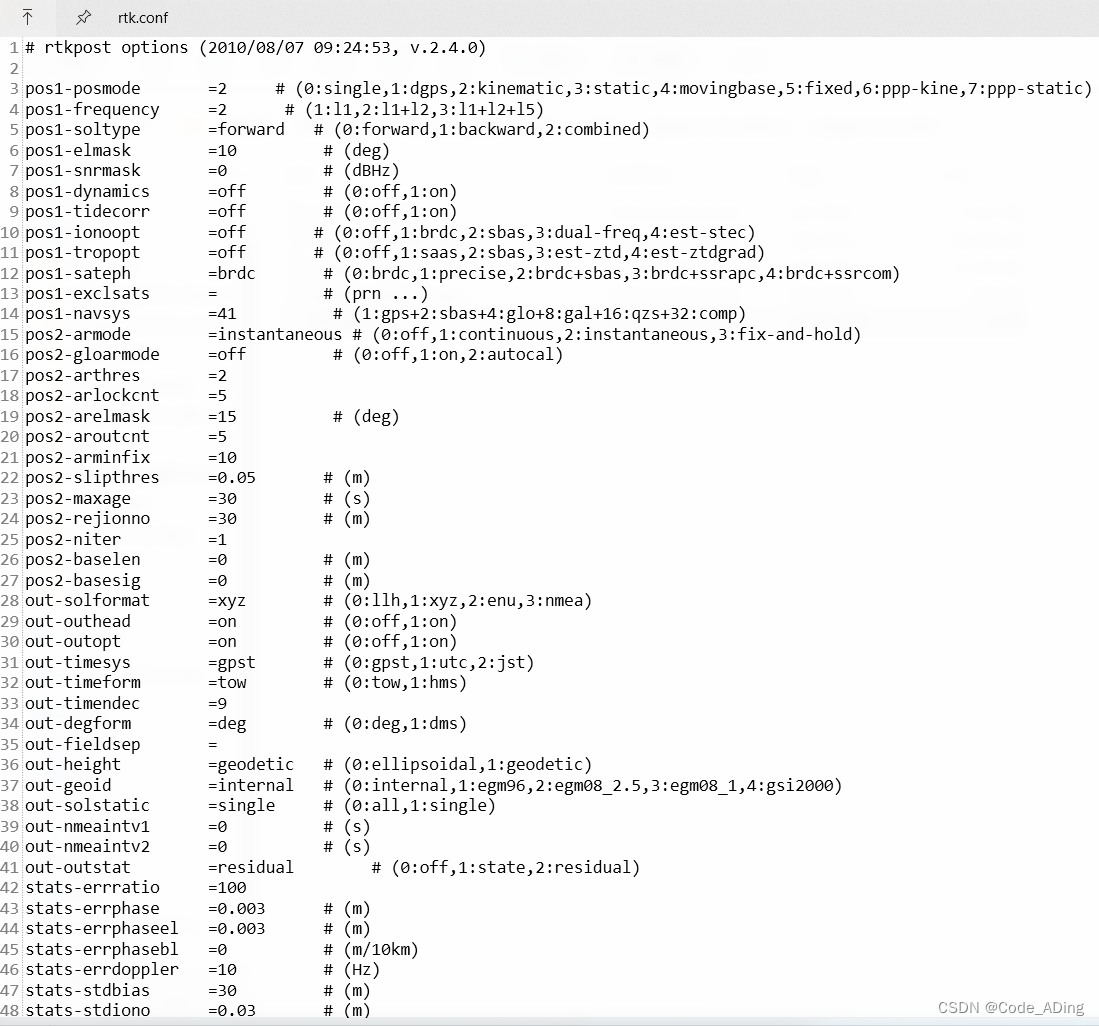
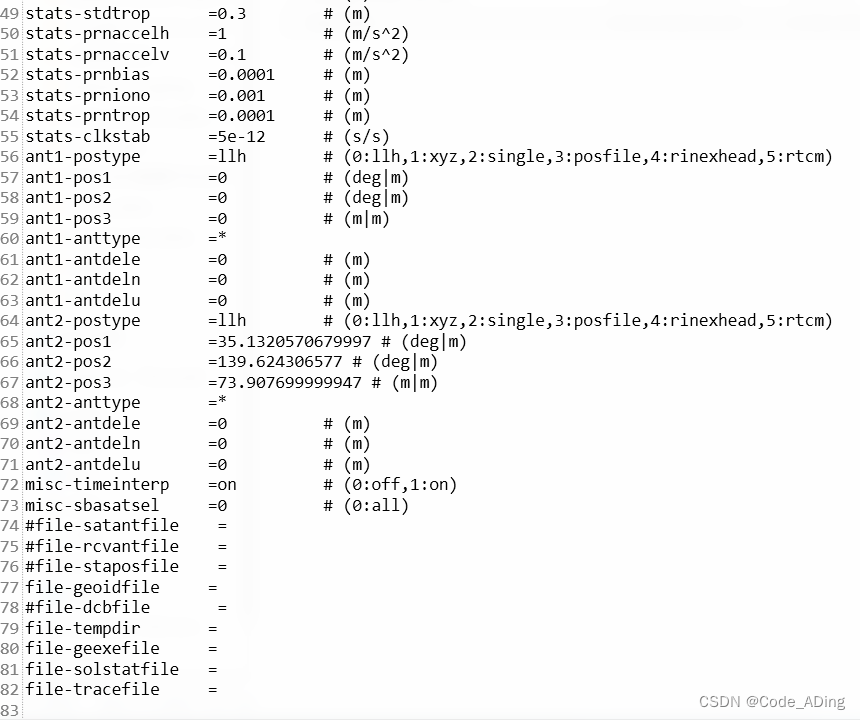
我所使用的配置文件配置情况如下:
关于各配置参数的含义在RTKLIB的说明文档中有提到,后续有时间再更新
2.2详细描述
读取 RINEX OBS/NAV/GNAV/HNAV/CLK、SP3、SBAS 报文日志文件,计算接收机(流动站)位置并输出位置解。
第一个 RINEX OBS 文件应包含接收机(流动站)的观测数据。
对于相对模式,第二个 RINEX OBS 文件应包含基准站接收机(基站)观测数据。
输入文件中至少应包含一个 RINEX NAV/GNAV/HNAV 文件。
要使用 SP3 精确星历表,请在文件中指定路径。SP3 文件的扩展名应为 .sp3 或 .eph。
所有输入文件路径均可包含通配符 (*)。为避免在命令行中部署通配符,请使用"... "表示包含通配符的路径。
命令行选项如下([]:默认)。
使用 -k 选项时,处理选项从配置文件中输入。在这种情况下,命令行选项优先于配置文件中的选项。配置文件参见 B.4。
2.3选项列表
-?? ? ? ? ? ? ?打印帮助
-k file ? ? ? 从配置文件中输入选项?[默认是关闭状态off]
-o file? ? ? ?设置输出文件?[默认:stdout]
-ts ds ts?? 开始时间(ds:年/月日 ts:时:分:秒)?(ds=y/m/d ts=h:m:s) [默认是o文件开始时刻 obs start time]
-te de te? ? 结束时间(de:年/月日 te:时:分:秒)(de=y/m/d te=h:m:s) [默认是o文件结束时刻 obs end time]
-ti tint? ? ? ? 时间间隔(秒)?[默认:all]
-p mode ? ?模式mode (0:单点,1:差分gps,2:动力学模式,3:静态,4:移动基线,
?????????????????5:固定解,6:ppp动态,7:ppp静态) [默认是选项2,动态/动力学]
-m mask? ?高度截止角(度) [默认是15°] 在输入命令时候不要带上单位°
-f freq? ? ? ?相对模式的频率数目?(1:L1,2:L1+L2,3:L1+L2+L5) [默认是2(L1+L2双频)]
-v thres? ??整周模糊度的验证阈值 (0.0:表示没有AR) [默认设置为3.0]
-b?? ? ? ? ? ? ?后向滤波求解?[默认关闭 off]? //默认是前向滤波求解
-c? ? ? ? ? ? ? 前后向组合求解?[默认关闭 off]
-i? ? ? ? ? ? ? instantaneous integer ambiguity resolution [默认关闭 off]
-h? ? ? ? ? ? ?fix and hold for integer ambiguity resolution [默认关闭 off]
-e? ? ? ? ? ? ?输出ecef框架下的xyz坐标?
????????????????[默认是经度/维度/高程的输出方式latitude/longitude/height]
-a? ? ? ? ? ? ?输出站心坐标系下的enu基线?
????????????????[默认是经度/维度/高程的输出方式latitude/longitude/height]
-n? ? ? ? ? ? ?输出NEMA格式的输出文件?[默认关闭 off]
-g?? ? ? ? ? ? 输出经度/纬度以这种形式:ddd mm ss.ss? ??[默认形式为:ddd.ddd]
-t? ? ? ? ? ? ? 输出时间以这种形式:yyyy/mm/dd hh:mm:ss? [默认形式为:sssss.ss]
-u? ? ? ? ? ? ?在utc下输出时间?[默认是gps时?gpst]
-d col? ? ? ? 在时间中的小数点个数?[默认是3个]
-s sep?? ? ? 字段分隔符?[默认使用空格 '?' ]
-r x y z? ? ? 参考站(基准站)接收机在ecef框架下的坐标(xyz 单位:m)
?????????????????[默认设置为单点定位的平均位置? average of single pos]
-l lat lon hgt 参考站(基准站)接收机在大地坐标系下的经度/纬度/高程(单位:deg/m °/m)
-y level? ? ? 输出解的状态信息 (0:off,1:states,2:residuals) [默认关闭 0]
-x level? ? ? trace级别(0:off) [0]
2.4示例
Example 1. Kinematic Positioning, L1+L2, output Latitude/Longitude/Height to STDOUT.
例1 动态定位 L1+L2双频? 输出 经度/纬度/高程到输出端
> rnx2rtkp 07590920.05o 30400920.05o 30400920.05n
Example 2. Single Point Positioning, El Mask=15deg, output NMEA GGA to file out.pos
例2 单点定位? 高度截止角设置为15°? 输出NMEA格式文件到out.pos文件
> rnx2rtkp -p 0 -m 15 -n -o out.pos 07590920.05o 30400920.05n
Example 3. Static Positioning, L1, time form yyyy/mm/dd hh:mm:ss, output X/Y/Z-ECEF positions
例3 静态定位 L1频率 时间格式:yyyy/mm/dd hh:mm:ss 输出ecef框架下的XYZ坐标位置
> rnx2rtkp -p 3 -f 1 -t -e 07590920.05o 30400920.05o 30400920.05n
Example 4. Kinematic Positioning, Instantaneous AR, validation threshold=2, comma separator
例4 动态定位? 瞬时处理的AR(单历元处理的模糊度固定方式)? 整周模糊度固定的阈值设置为2? 分隔符设置成逗号','(-s ,)
> rnx2rtkp -i -v 2 -s , 07590920.05o 30400920.05o 30400920.05n
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!