liosam 速腾激光雷达数据适配,timestamp位数不够
发布时间:2024年01月11日
首先是时间,点云的时间是绝对时间,所以不能用加法

修改过后,scan start和end差距过大,六十多秒。
![]()
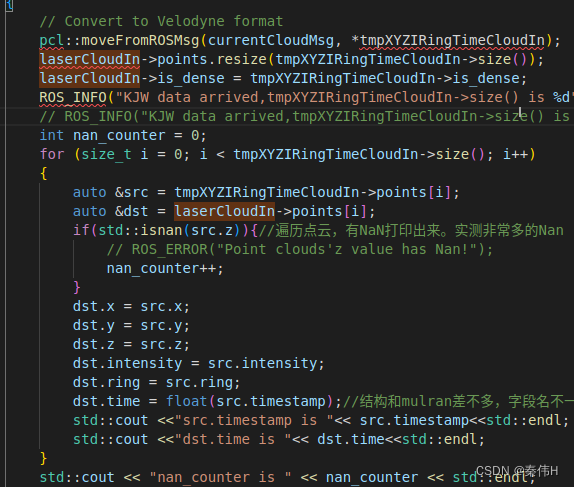
这里的timestamp要double转float,这里有个古老知识要复习,float是32位,有23位是数字,为什么只有8位一样?
首先,float 是 32位, 其中有23位用于存放尾数, 带有一个固定隐含位… 所以float的有24个二进制有效位位数.
其次,2^24共有8个十进制位. 所以有些编译器 float的有效数字位是 8位 , 有些有效数字位是 7位.(注意不是小数的位数, 是有效数字位)
而double有15~16位有效数字。
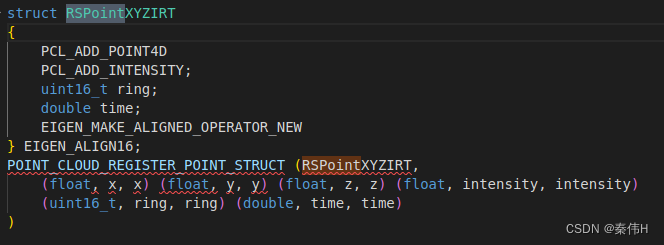
所以,timestamp用float是装不下的,所以需要把lio-sam的数据结构改double,从需求看,整数秒有10位,多出5位比毫秒还低,足够用了。
然后直接改VelodynePointXYZIRT的time数据类型为double就好了
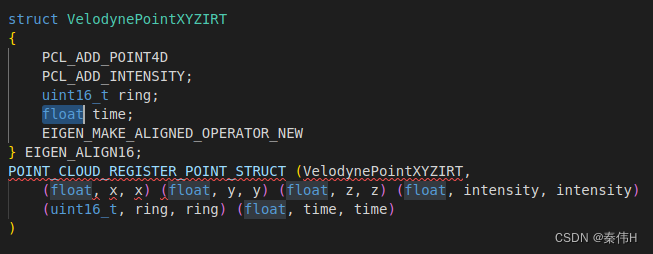
不一定要修改这个,只是因为using PointXYZIRT = VelodynePointXYZIRT;
自己定义一个

最后就是回到问题原点,这里不要再加float转换了,不然白改。

文章来源:https://blog.csdn.net/huqinweI987/article/details/135519097
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【EI征稿倒计时3天】第四届IEEE信息科学与教育国际学术会议(ICISE-IE 2023)
- Tailscale:随时随地远程和使用服务器
- 自然语言推断:注意力之注意(Attending)
- 如何用一份完美简历锁定心仪工作?
- 【JVM 基础】 Java 类加载机制
- DVenom:一款功能强大的Shellcode加密封装和加载工具
- Java包装类及引用数据类型(学习推荐版,通俗易懂)
- Structure-from-Motion Revisited(COLMAP) 流程介绍
- c语言—九九乘法表
- Python兼职高峰期来了!学会爬虫到底能有多爽?