【学习记录】Ouster雷达运行fastlio提示 Failed to find match for field ‘ring‘ 的解决办法
发布时间:2024年01月20日
本文仅用于个人记录。
在使用ouster雷达运行fastlio代码时,提示
Failed to find match for field ‘ring’
但ouster雷达确实是发布了ring信息,可以从启动的rviz里面看到包括ring。

进一步检查,发现ouster对ring的定义是 uint_16t,而我印象中ring一般定义的都是 uint_8t,所以改了一下,就没有了这个报错。
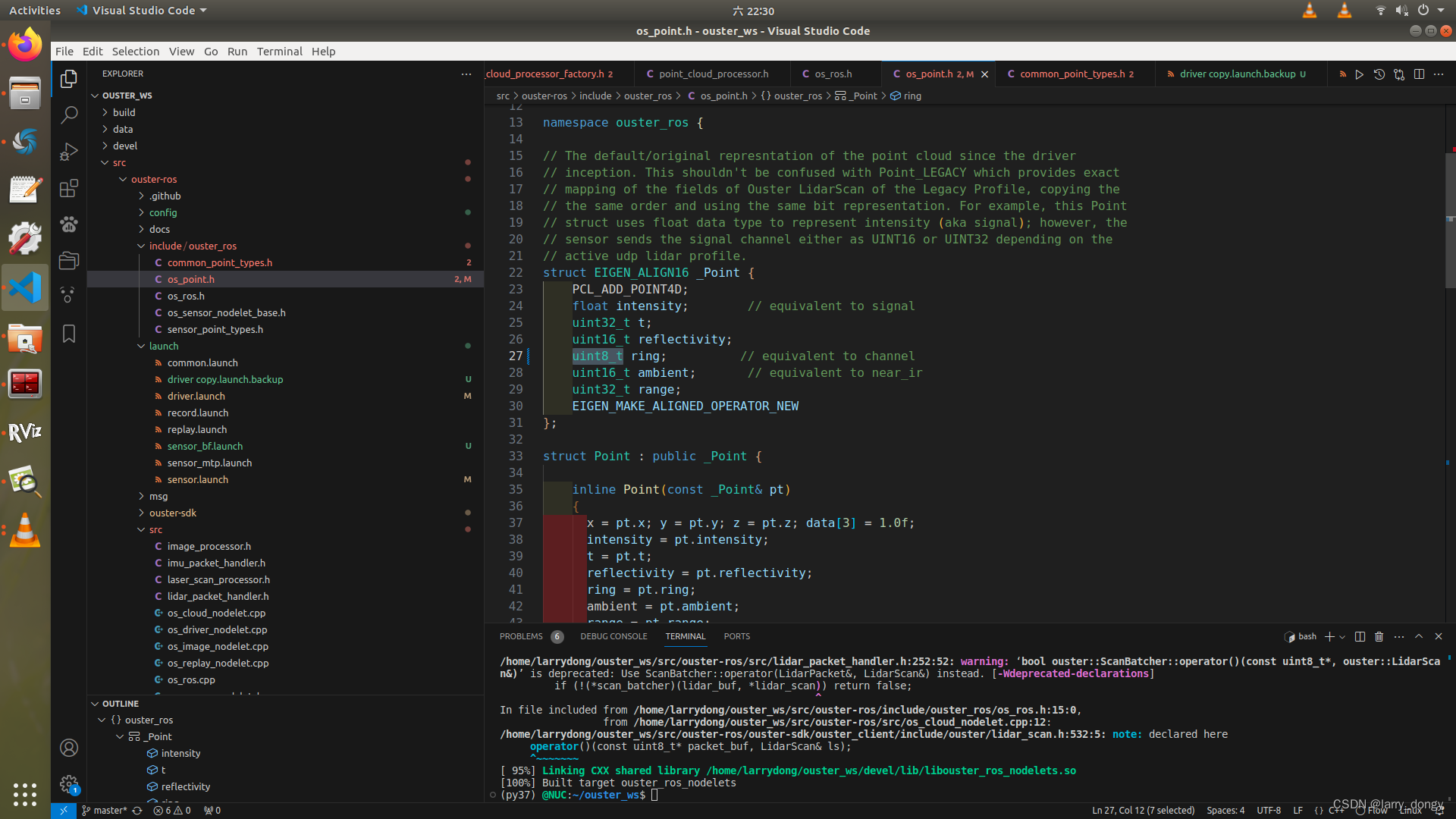
即,将: ouster-ros/include/ouster_ros/os_point.h 这个文件中的 uint16_t ring 都改成 uint8_t ring,之后再编译,fastlio便不出现这个warning。
但是,需要注意的是,ouster雷达可以发布多种类型的点云,在driver.launch中的point_type进行定义。选择 original 类型即可。

其他的几种类型,参考github官方给出的解释:

即:xyz 是最简单的,xyzi增加了intensity,xyzir增加了ring,original是 ouster_ros::Point定义的格式,可以翻源码,native是原始的点进行的输出。original包括:ambient, intensity, range, reflectivity, ring, t, x, y, z。
intensity和reflectivity的区别:前者是我们一般说的“强度”,后者是ouster雷达特有的“材质反射率”。即,前者是这根激光发出后收到的返回强度,后者是这根激光打到的物体的表面的反射率。
文章来源:https://blog.csdn.net/tfb760/article/details/135723137
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 笔记本电脑和电脑上的 7 款最佳免费且易于使用的 PDF 编辑软件
- CMake入门教程【高级篇】CPack打包项目Linux的deb和windows的msi
- C 语言函数完全指南:创建、调用、参数传递、返回值解析
- 【Python基础】一文搞懂:Python 中 csv 文件的写入与读取
- 【js自定义鼠标样式】【js自定义鼠标动画】
- Figma怎么设置中文,Figma有中文版吗?
- c语言中一维数组在计算机内部的二进制数存储规则
- vue中element-ui日期选择组件el-date-picker 清空所选时间,会将model绑定的值设置为null 问题 及 限制起止日期范围
- 使用GDB动态补丁ARM64的程序 跳转到任意地址
- GPT4免费资源大公开!揭露3种获取GPT4及API的方法。