[AutoSar]BSW_OS 04 Autosar OS_ISR 中断
目录
??
关键词
嵌入式、C语言、autosar、OS、BSW
平台说明
| 项目 | Value |
|---|---|
| OS | autosar OS |
| autosar厂商 | vector , |
| 芯片厂商 | TI 英飞凌 |
| 编程语言 | C,C++ |
| 编译器 | HighTec (GCC) |

一、中断简介
??在OS中ISR是不可缺少的一部分,它提供了软件和外界的事件的联系方式(如ADC,can通信)和软件内事件及时响应的可能(如DMA,TOM)。
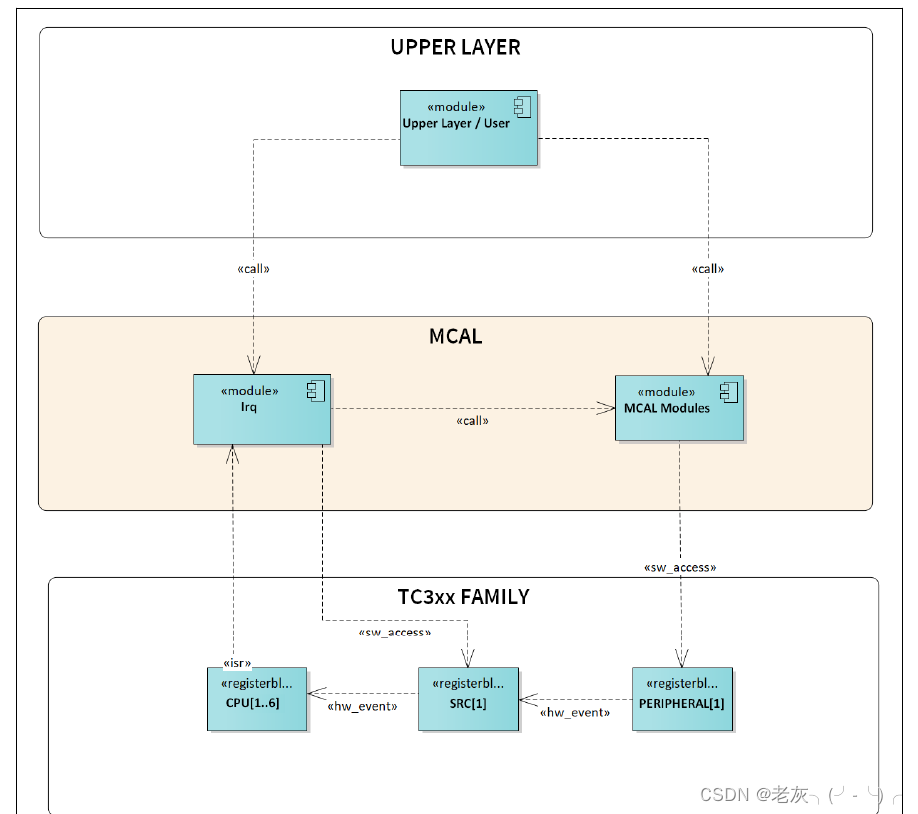
下图以英飞凌TC 芯片为例 展示了中断 从硬件–>软件的 mapping
Service request control register(SRC)
??IRQ驱动程序访问中断控制器的寄存器。驱动程序初始化特定于外设的srn优先级。在接收到中断时,中断系统跳转到IRQ驱动程序中适当的中断处理程序帧,并调用相应的中断处理程序函数。在MCAL驱动程序中,中断处理程序函数位于软件驱动程序中
1.2 vector中断概述
二 、中断向量表
??中断向量表是根据芯片类型和编译器类型所生成的,指向每个可能产生中断的中断源。在多核系统中可以生成多个向量表。
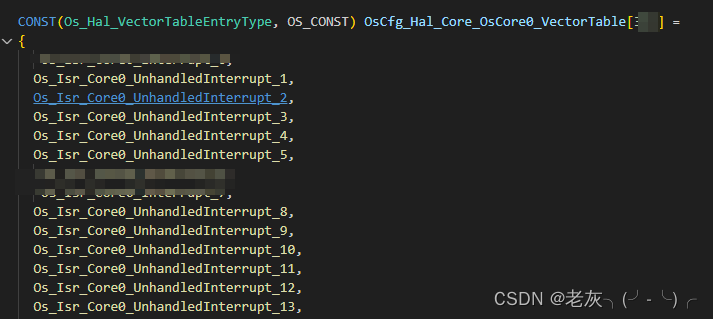
Adc_IntISR_Fun
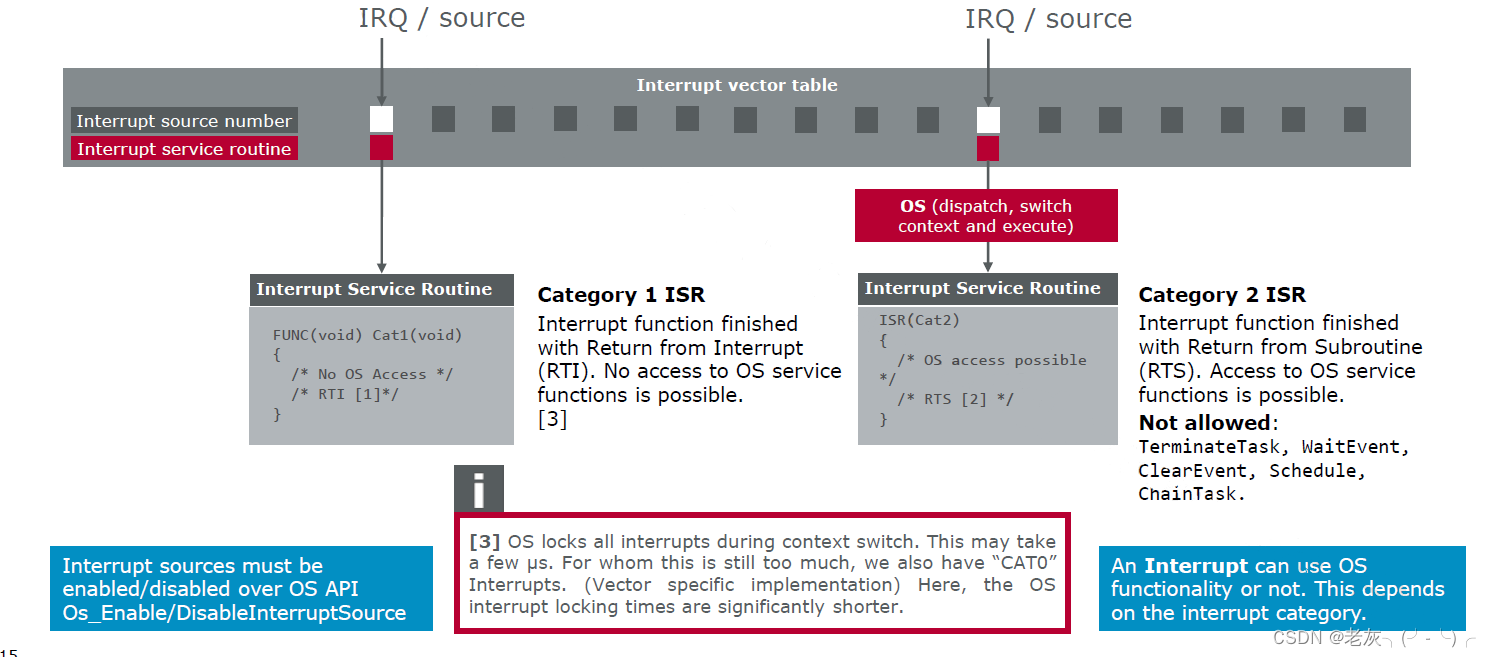
三 、中断分类
| 0类中断 | 只有vector才有此概念,不受OS管控 |
|---|---|
| 1类中断 | 不受OS管控 |
| 2类中断 | 受OS管控 |
优先级如下:
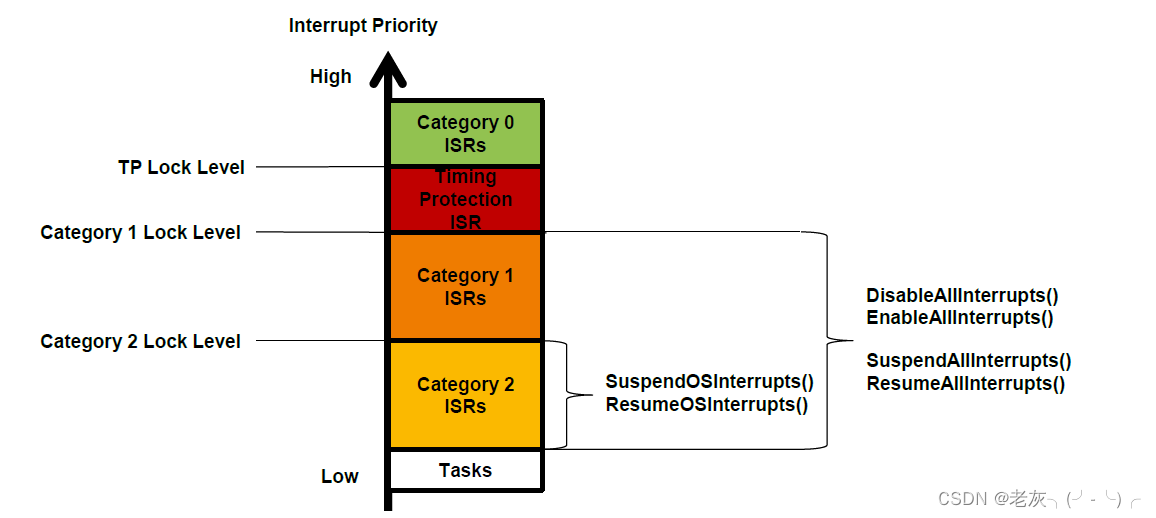
3.1 开关中断控制
DisableAllInterrupts() EnableAllInterrupts()
The functions disable all category 1 and category 2 interrupts. SuspendAllInterrupts() ResumeAllInterrupts() SuspendOSInterrupts() ResumeOSInterrupts()
The functions disable category 2 interrupts only.
| DisableAllInterrupts() EnableAllInterrupts() SuspendOSInterrupts() ResumeOSInterrupts() | 用于控制一类和二类中断 |
|---|---|
| SuspendOSInterrupts() ResumeOSInterrupts() | 仅能用于控制二类中断. |
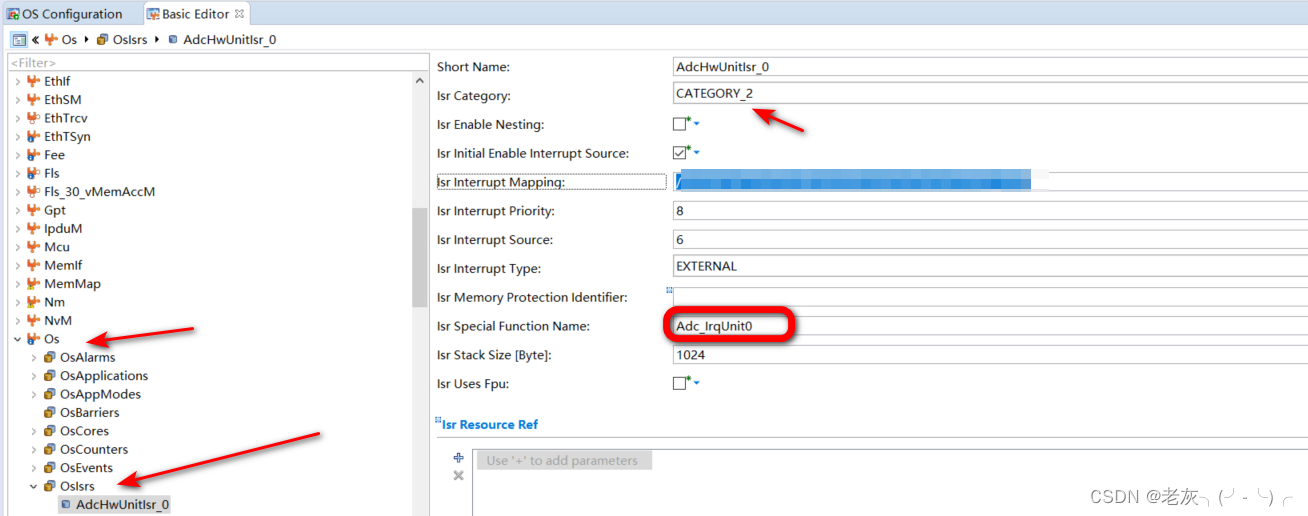
3.2 二类中断
??优先级低于1类中断高于task。
3.2.1 配置
??以创建一个AD采集为例:
3.2.2 code
ISR(Adc_IrqUnit0)
{
Adc_IntISR_Fun(ADC_UNIT_0);
}
FUNC(void, ADC_CODE_FAST) Adc_IntISR_Fun(Adc_ChannelType AdcChannel)
{
uer_code;
读取AD寄存器之类的
}
3.2.3 Nesting of Category 2 Interrupts
??**作用:**尽可能的降低延迟

3.3 一类中断
??一类中断优先级低于0类中断高于2类中断。
3.3.1 一类中断的实现
定义了一个宏来实现。
/***********************************************************************************************************************
* OS_ISR1()
**********************************************************************************************************************/
/*! \def OS_ISR1()
* \brief Category 1 ISR function declaration macro.
* \details This macro builds the category 1 ISR function declaration for a function name.
*
* \param[in] IsrName The ISR name.
**********************************************************************************************************************/
# define OS_ISR1(IsrName) OS_HAL_ISR1_DEFINE(IsrName)
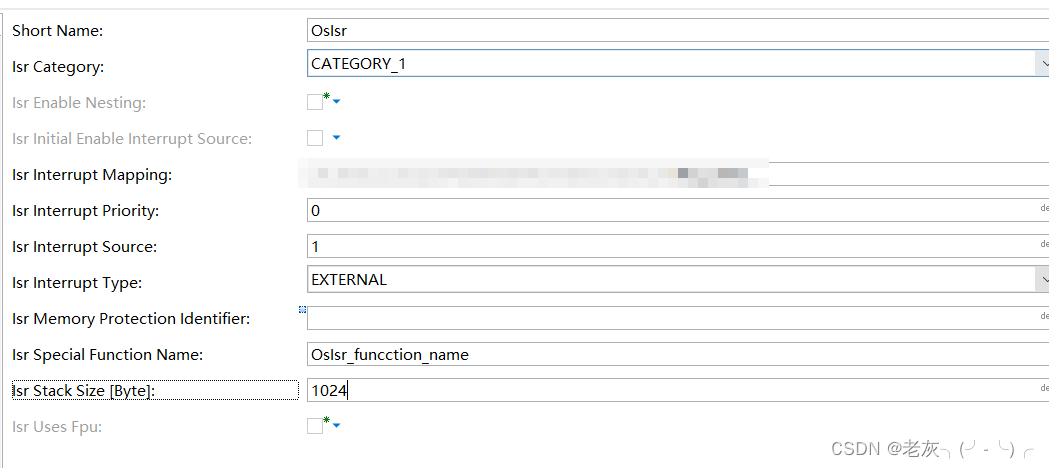
OS_ISSR1(OsIsr_funcction_name)
OsIsr_funcction_name()
{
}
3.3.2 注意事项
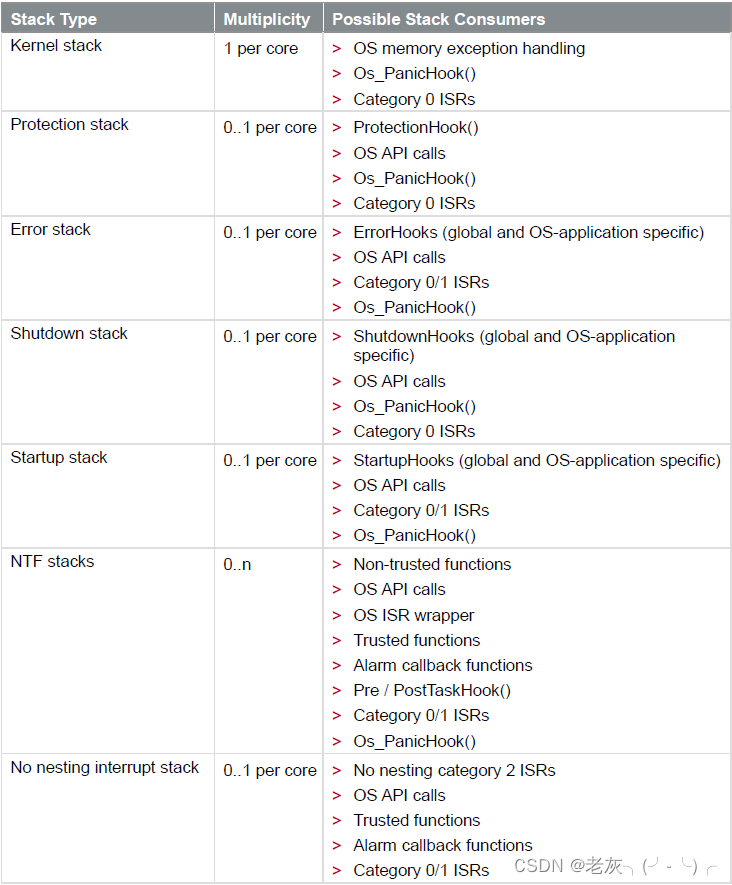
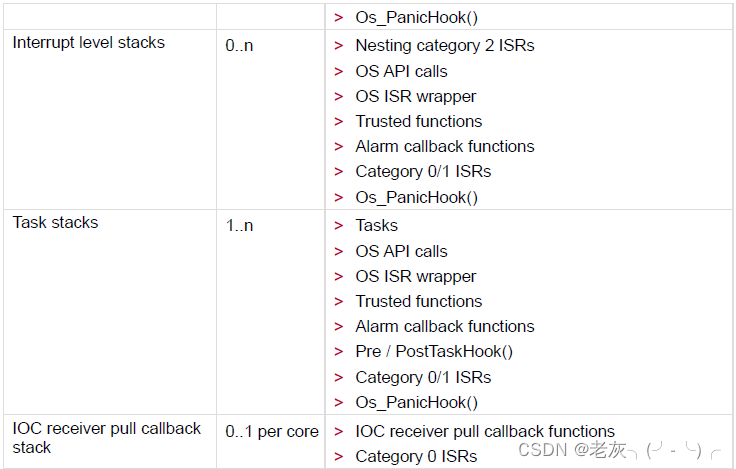
1.vector 规定了不同的stack类型,不同的用户只能在匹配的stack上压栈和出栈。如果在一个不能根据中断请求自动切换合适的栈的平台上配置一类中断,会导致该中断无法压栈导致OS错误。
2.autosar OS 标准不允许在一类中断中调用 OS API。
3.4 0类中断
??0类中断是vector 工具链特有的。0类中断比1类中断具有更低的延迟。
3.4.1 0类中断的实现
和一类中断类似,由一个宏来实现。
/***********************************************************************************************************************
* OS_ISR0()
**********************************************************************************************************************/
/*! \def OS_ISR0()
* \brief Category 0 ISR function declaration macro.
* \details This macro builds the category 0 ISR function declaration for a function name.
*
* \param[in] IsrName The ISR name.
**********************************************************************************************************************/
# define OS_ISR0(IsrName) OS_HAL_ISR0_DEFINE(IsrName)
3.4.2 注意事项
1.和一类中断一样,如果在一个不能根据中断请求自动切换合适的栈的平台上配置0类中断,会导致该中断无法压栈导致OS错误。
2.0类中断会打断1类2类中断(即使为non nestable)和task,因此0类中断会占用上述三类的时间消耗。
3.如果在0类中断执行期间时间保护中断产生了,那么时间保护的后续操作(violation 或则hook)将会延迟到0类中断执行完成后才会调用。
4.在OS关闭或者进入panic hook,0类中断依旧可以被触发。
>>>>>回到总目录<<<<<<
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 阿里云国际服务器设置安全防护程序
- 代码随想录 Leetcode239. 滑动窗口最大值
- IO内存访问函数
- 逼格满满,推荐一个高效测试用例工具:XMind2TestCase !
- vue中高德地图使用
- 填充立方体
- 力扣 第 122 场双周赛 解题报告 | 珂学家 | 脑筋急转弯 + 滑窗&反悔堆
- 华为 Mate60 雪景拍摄 tips,教你用长焦微距拍冰花和雪花~
- 深入理解多线程编程和 JVM 内存模型
- ardupilot 方向余弦矩阵/旋转矩阵的理解