【电力电子在电力系统中的应用】1 具有输出限幅的离散系统的PID控制器
发布时间:2024年01月16日
【仅供参考】
【2023.02西南交大电力电子在电力系统中的应用】
目录
0 仿真要求
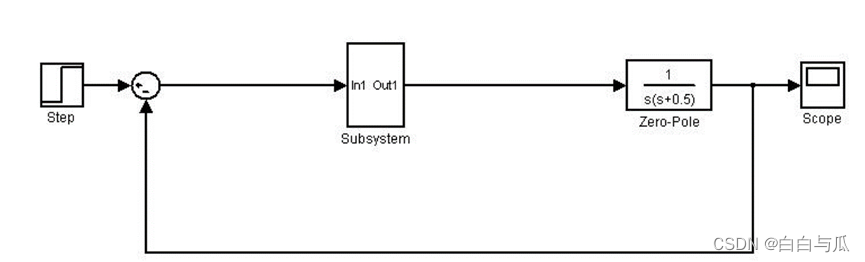
????????1、针对极点0,-0.5的被控系统,设计具有输出限幅的离散系统的PID控制器,并封装成参数可设置的模块,可设置Kp、Ki、Kd、输出限幅最大、最小值等参数。
????????2、验证PID在以下系统(替换Subsystem)的阶跃输出。
1 PID控制器的设计与封装
1.1?搭建仿真电路
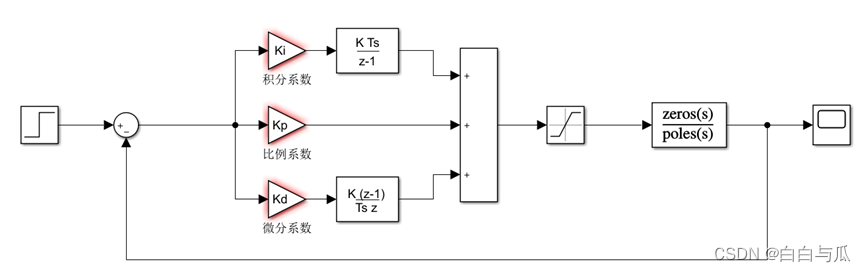
其中:
- 将三个Gain模块的数值分别用参数Ki、Kp、Kd代替,便于后续封装成subsystem、创造Mask模块后,对模块属性进行设置;
- 在Ki对应的Gain模块后串上一个Discrete-Time Integrator(离散时间积分)模块;
- 在Kd对应的Gain模块后串上一个Discrete Derivative(离散系统微分)模块;
- 用Add模块将比例、积分、微分三条线路进行加和;
- 在Add模块后串联一个Saturation模块,对输出进行限幅;
????????将Saturation模块中Upper limit、Lower limit的数值分别用参数Max和Min代替,以便于后续创造Mask模块后,对模块属性进行设置。
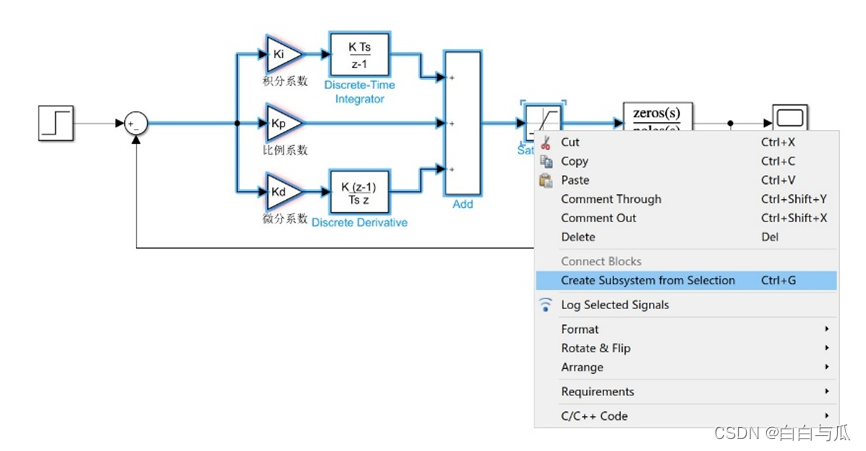
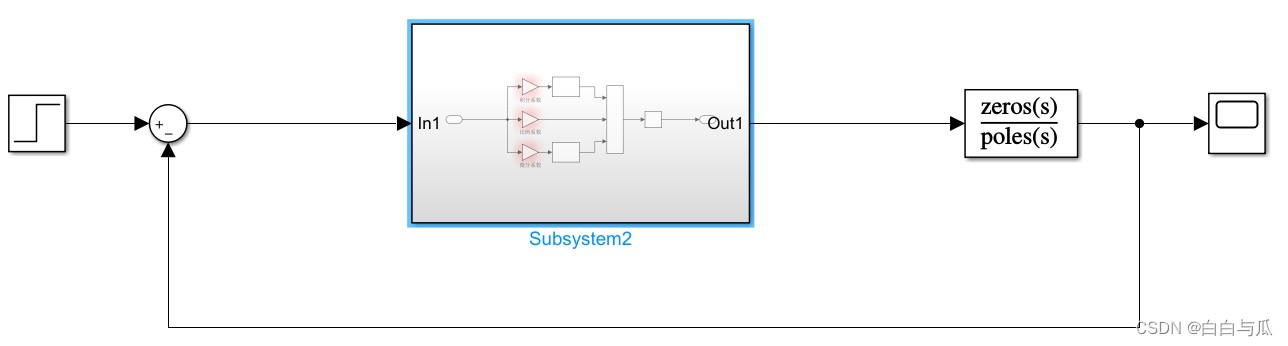
1.2 对PID控制器部分封装为subsystem模块
????????得到下图所示电路:
?1.3 创建Mask模块

????????对各参数进行编辑如下:
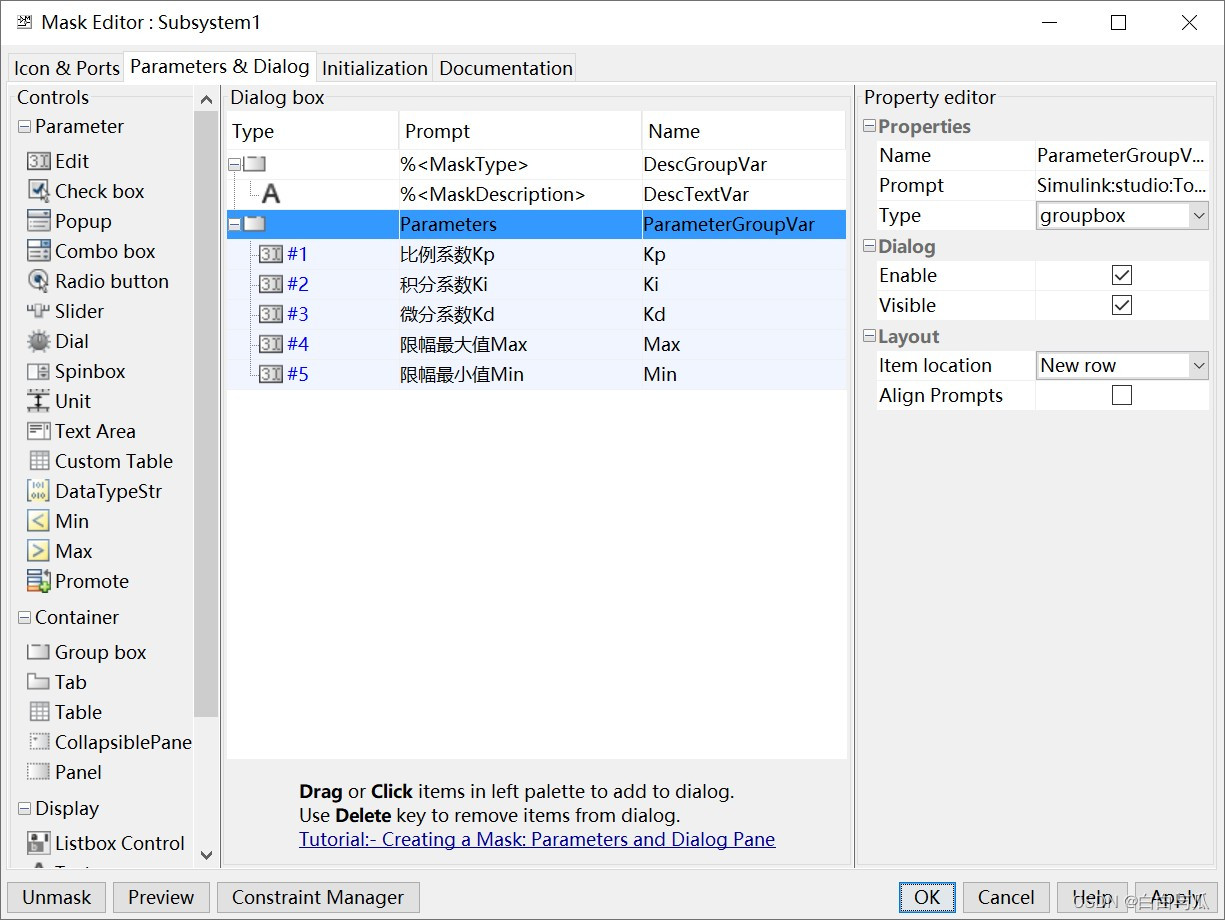
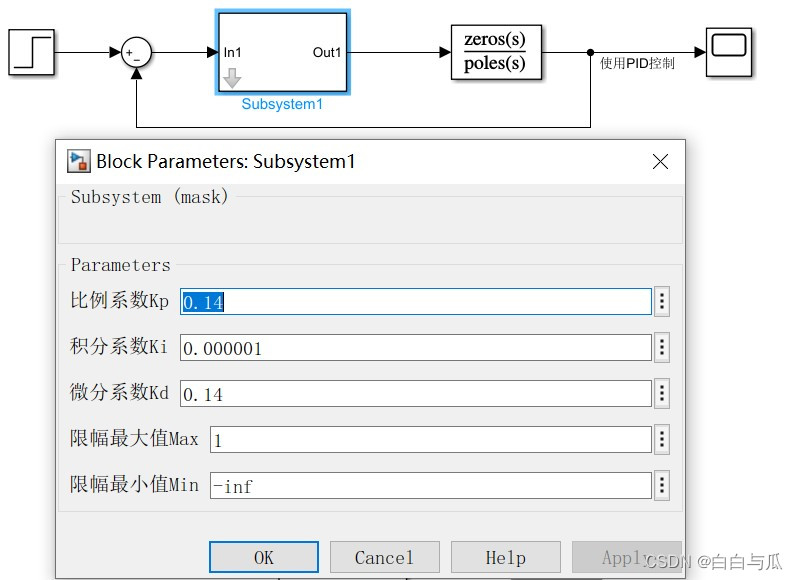
????????得到参数可设置的模块如下(可设置Kp、Ki、Kd、输出限幅最大、最小值等参数):

2 PID控制器的参数选择
2.1?Kp参数的调节
????????先将Ki、Kd清零,不进行限幅。如右图,当Kp选为0.05时(图中黄线所示),达到稳态时间偏长;Kp选为0.14时(图中蓝线所示),反应速度提升,但产生过冲。

2.2 Ki参数的调节
????????Ki在有外力作用和系统误差时用以消除偏差、提高精度。调大Ki也可增加响应速度,但同时也会产生过冲、过大会产生振荡。此处调节Ki参数效果不甚明显,故取一较小数值0.000001。
2.3 Kd参数的调节
????????Kd用以抑制过冲和振荡。Kd过小系统会产生过冲,过大则会减慢响应速度。如右图,当Kd选为0.01时(图中黄线所示),产生些许过冲;Kp选为0.14时(图中蓝线所示),差不多为预期所需。

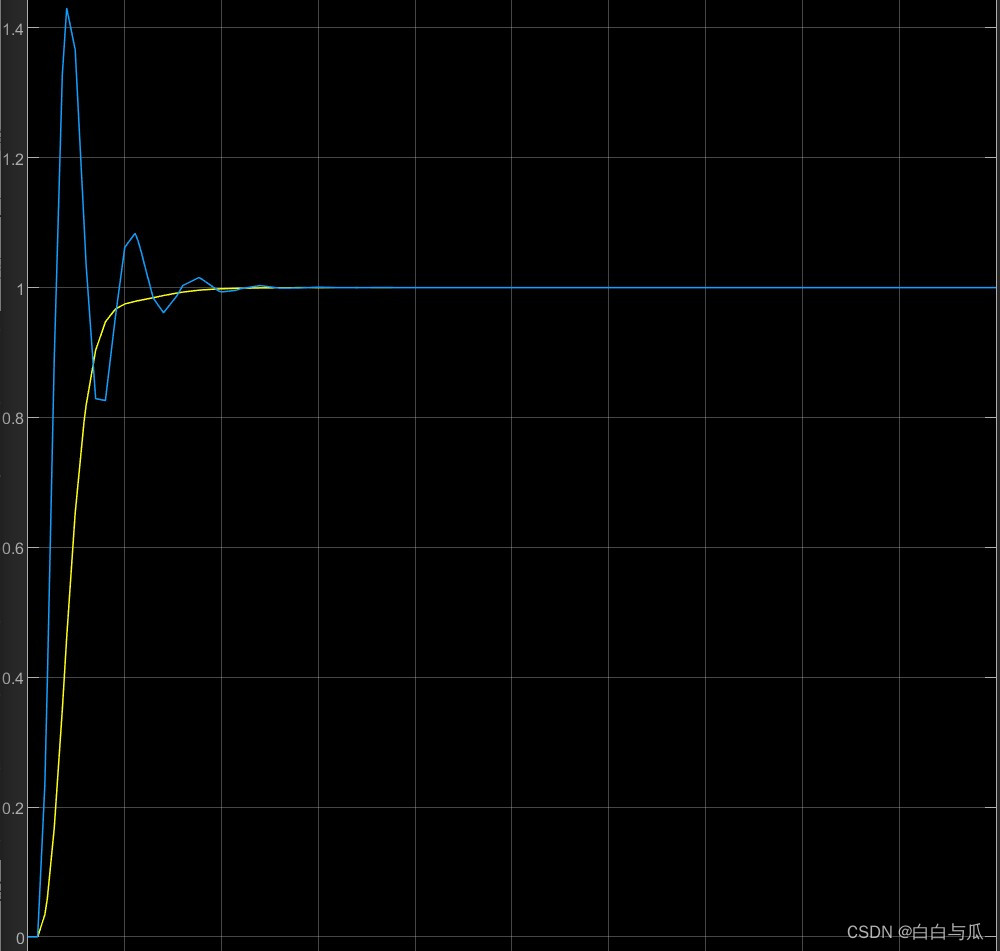
????????综上所述,所得参数如图:
????????
????????使用PID控制(黄线)和不使用PID控制(蓝线)时输出波形如图:?
文章来源:https://blog.csdn.net/yck1716/article/details/135633696
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- DevOps搭建(十六)-Jenkins+K8s部署详细步骤
- C#上位机与三菱PLC的通信01--搭建仿真环境
- JMM到底如何理解?JMM与MESI到底有没有关系?
- Flamingo与亚马逊云科技合作,进一步优化海外客户的访问体验
- 深度解析Android APP加固中的必备手段——代码混淆技
- 【C程序设计】C判断
- SpringBoot 增量/瘦身部署jar 包
- 24岁,拿到18K,我真的很卷?
- Linux 一键部署influxd2-telegraf
- 重磅发布!基于百度飞桨的《人工智能基础及应用》书籍正式上线