时间轮设计
发布时间:2024年01月23日
目录
基本概念
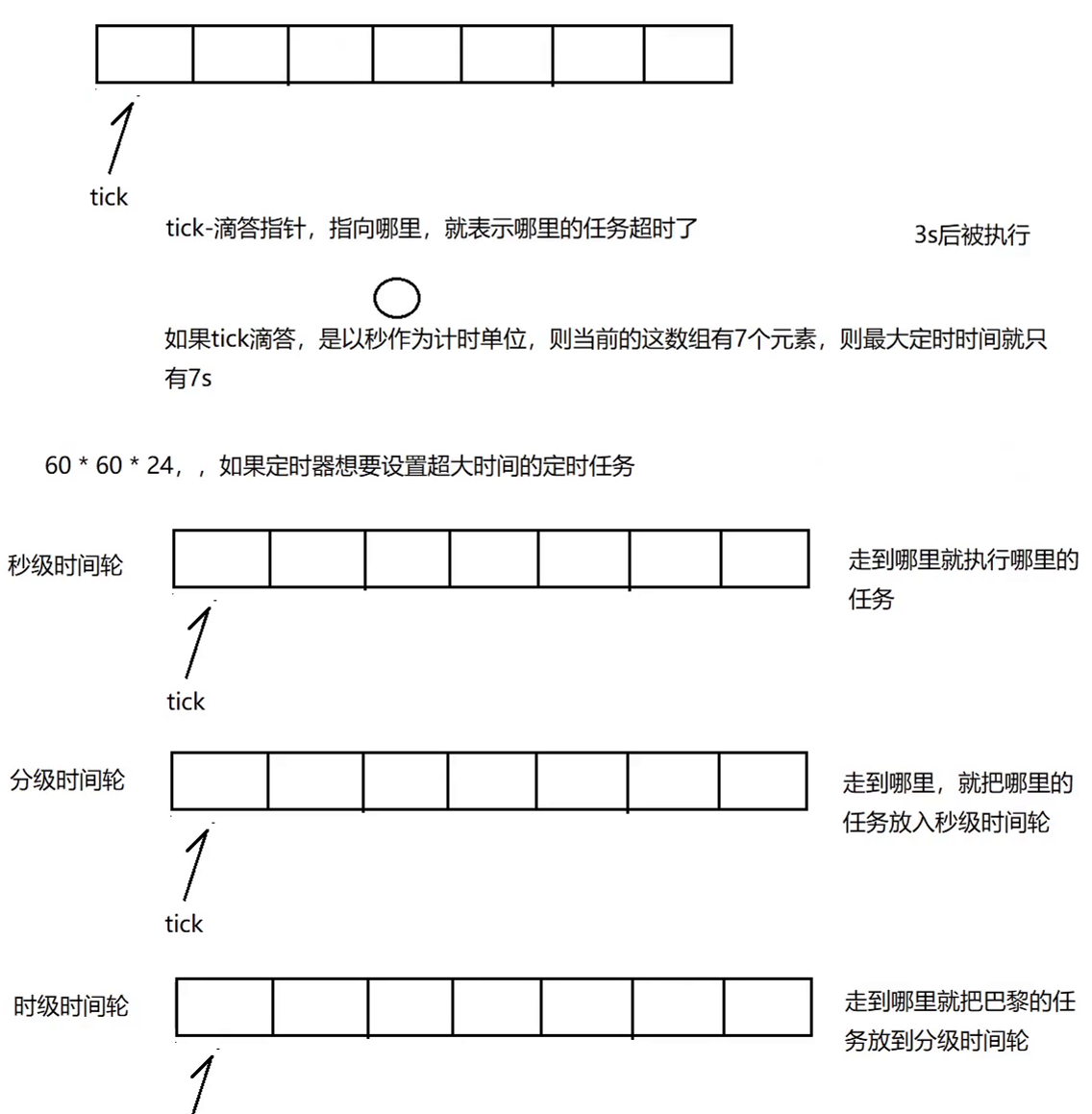
时间轮 是一种 实现延迟功能(定时器) 的 巧妙算法。如果一个系统存在大量的任务调度,时间轮可以高效的利用线程资源来进行批量化调度。把大批量的调度任务全部都绑定时间轮上,通过时间轮进行所有任务的管理,触发以及运行。能够高效地管理各种延时任务,周期任务,通知任务等。
这几张图是了解了解用的,可能看不懂,用以解决mudo服务器中高并发性能的要求的

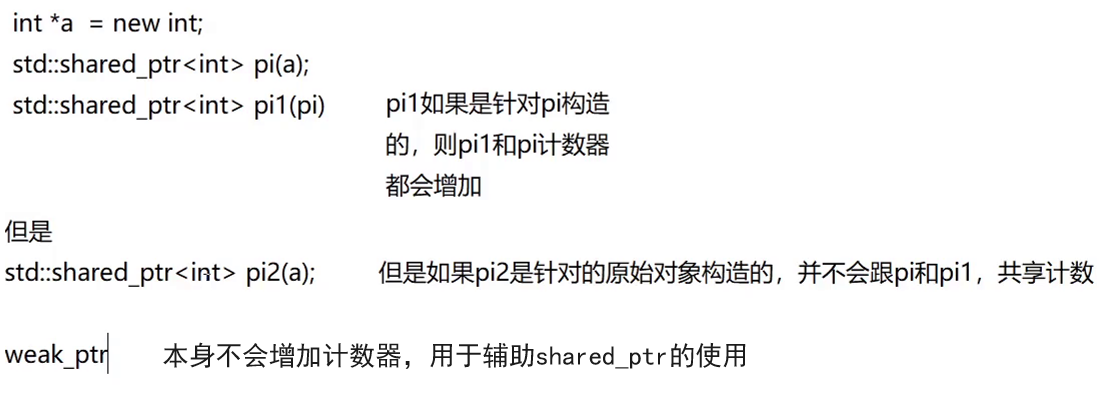
weak_ptr了解一下下
函数定义
#include <iostream>
#include <stdint.h>
#include <functional>
#include <vector>
#include <memory>
#include <unordered_map>
using TaskFunc = std::function<void()>;
using ReleaseFunc = std::function<void()>;
class TimerTask
{
private:
uint64_t _id; // 定时器任务对象
uint32_t _timeout; // 定时任务的超时时间
TaskFunc _task_cb; // 定时器要执行的定时任务
ReleaseFunc _release; // 用于删除TimerWheel中保存的定时器对象信息
public:
TimerTask(uint64_t id, uint32_t delay, const TaskFunc &cb) : _id(id), _timeout(delay), _task_cb(cb) {}
~TimerTask()
{
_task_cb();
_release();
}
void SetRelease(const ReleaseFunc &cb) { _release = cb; }
};
class TimerWheel
{
private:
using WeakTask = std::weak_ptr<TimerTask>;
using PtrTask = std::shared_ptr<TimerTask>;
int _tick; // 当前的的秒针,走到哪里哪里就释放执行
int _capacity; // 表盘最大数量 -- 其实就是最大延迟时间
std::vector<std::vector<PtrTask>> _wheel;
std::unordered_map<uint64_t, WeakTask> _timers; // 用weak_ptr来构造出新的shared_ptr用来计数,不过后续要记得释放
public:
TimerWheel() : _capacity(60), _tick(0), _wheel(_capacity) {}
void TimerAdd(uint64_t id, uint32_t delay, const TaskFunc &cb); // 添加定时任务
void TimerRefresh(uint64_t id); // 刷新/延迟定时任务
};函数实现与测试
#include <iostream>
#include <stdint.h>
#include <functional>
#include <vector>
#include <memory>
#include <unordered_map>
#include <unistd.h>
using TaskFunc = std::function<void()>;
using ReleaseFunc = std::function<void()>;
class TimerTask
{
private:
uint64_t _id; // 定时器任务对象
uint32_t _timeout; // 定时任务的超时时间
bool _canceled; // false-表示没有被取消,true-表示被取消
TaskFunc _task_cb; // 定时器要执行的定时任务
ReleaseFunc _release; // 用于删除TimerWheel中保存的定时器对象信息
public:
TimerTask(uint64_t id, uint32_t delay, const TaskFunc &cb) : _id(id), _timeout(delay), _task_cb(cb), _canceled(false) {}
~TimerTask()
{
if (_canceled == false)
_task_cb();
_release();
}
void Cancel() { _canceled = true; }
void SetRelease(const ReleaseFunc &cb) { _release = cb; }
uint32_t DelayTime() { return _timeout; } // 返回时间
};
class TimerWheel
{
private:
using WeakTask = std::weak_ptr<TimerTask>;
using PtrTask = std::shared_ptr<TimerTask>;
int _tick; // 当前的的秒针,走到哪里哪里就释放执行
int _capacity; // 表盘最大数量 -- 其实就是最大延迟时间
std::vector<std::vector<PtrTask>> _wheel;
std::unordered_map<uint64_t, WeakTask> _timers; // 用weak_ptr来构造出新的shared_ptr用来计数,不过后续要记得释放
private:
void RemoveTimer(uint64_t id)
{
auto it = _timers.find(id);
if (it != _timers.end())
{
_timers.erase(it);
}
}
public:
TimerWheel() : _capacity(60), _tick(0), _wheel(_capacity) {}
void TimerAdd(uint64_t id, uint32_t delay, const TaskFunc &cb) // 添加定时任务
{
PtrTask pt(new TimerTask(id, delay, cb)); // 实例化定时任务对象
pt->SetRelease(std::bind(&TimerWheel::RemoveTimer, this, id)); // 第0个位置是隐藏的this指针。再把任务id绑定进去
int pos = (_tick + delay) % _capacity;
_wheel[pos].push_back(pt);
_timers[id] = WeakTask(pt);
}
// 刷新/延迟定时任务
void TimerRefresh(uint64_t id)
{
// 通过保存的定时器对象的weak_ptr构造一个shared_ptr出来, 添加到轮子中
auto it = _timers.find(id);
if (it == _timers.end())
{
return; // 没找到定时任务, 没法刷新,没法延迟
}
PtrTask pt = it->second.lock(); // lock获取weak_ptr管理的对象对应的shared_ptr
int delay = pt->DelayTime(); // 获取到了初始的延迟时间
int pos = (_tick + delay) % _capacity;
_wheel[pos].push_back(pt);
}
void TimerCancel(uint64_t id)
{
auto it = _timers.find(id);
if (it == _timers.end())
{
return; // 没找到定时任务, 没法刷新,没法延迟
}
PtrTask pt = it->second.lock(); // 当还没有过期才进行取消
if(pt) pt->Cancel();
}
// 这个函数应该每秒钟被执行一次,相当于秒钟向后走了一步
void RunTimerTask()
{
_tick = (_tick + 1) % _capacity;
_wheel[_tick].clear(); // 清空指定位置的数组,就会把数组中保存的所有管理定时器对象的shared_ptr释放掉.从而执行函数
}
};
// 以下是测试
class Test
{
public:
Test() { std::cout << "构造" << std::endl; }
~Test() { std::cout << "析构" << std::endl; }
};
void DelTest(Test *t)
{
delete t;
}
int main()
{
TimerWheel tw;
Test *t = new Test();
tw.TimerAdd(888, 5, std::bind(DelTest, t));
for (int i = 0; i < 5; i++)
{
sleep(1);
tw.TimerRefresh(888); // 刷新定时任务
tw.RunTimerTask(); // 向后移动秒针
std::cout << "刷新了一下定时任务,重新需要5s钟后才会销毁\n";
}
// tw.TimerCancel(888); // 取消定时任务的测试
while (1)
{
sleep(1);
std::cout << "------------------------\n";
tw.RunTimerTask(); // 向后移动秒钟
}
return 0;
}测试1结果如下

达到预期
测试2结果如下
将下列代码放开
![]()
测试2结果如下

取消成功,达到预期
文章来源:https://blog.csdn.net/weixin_67595436/article/details/135756020
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章