代客泊车PNC模块框架详细设计
发布时间:2024年01月12日
目录
2?????? 基础组件(根据设计进行调整,变化会比较大)... 9
- PAVP规划控制模块整体架构
PAVP规划控制模块建立在Pavaro实时车载操作系统之上,其具体可分为基础组件层和功能子模块层。基础组件层定义了配置管理、坐标系转换、底盘信息处理、状态机、通用库、工具、仿真支持以及道路信息查询引擎等。功能子模块层包含了场景管理、决策、规划和控制子模块。在具体实现中,决策和规划模块托管在场景管理器中,在一个线程中运行,控制模块在一个线程中运行。决策规划子模块与控制模块分离,一是其运行频率不同,二是避免由于决策规划子模块卡顿或异常退出引起控制指令无法下发。另外,基础组件层的道路信息查询引擎也在一个独立的线程中实现,其功能是通过主车定位信息绑定道路信息供其他模块使用。具体结构可参考下图。
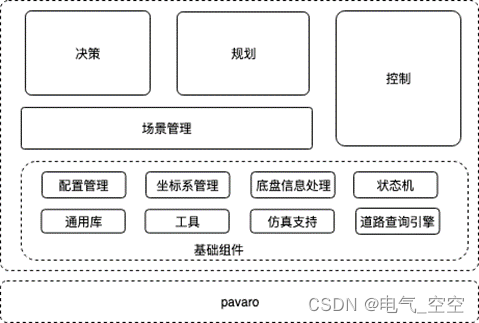
图 1 PAVP规划控制模块架构图
需要完整文档私信
文章来源:https://blog.csdn.net/weixin_45905610/article/details/135546091
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 批量估计问题
- 如何锁定word文档格式不变?
- java数据结构与算法:栈
- [蓝桥杯 2015 省 A] 饮料换购
- PR、希喂、百利主食冻干哪款更好?铲龄8年真实喂养测评
- web自动化(3)——项目实战之流程用例编写
- 华清远见作业第二十五天——IO(第八天)
- 振弦采集仪在地基沉降监测中的应用研究
- 超真实随身WiFi测评,你确定不看一下?随身WiFi靠谱吗? 看完这篇文章你就懂了?随身WiFi真实评测
- C#,入门教程(35)——哈希表(Hashtable)的基础知识与用法