Datawhale 强化学习笔记(三)基于策略梯度(policy-based)的算法
参考
之前介绍的 DQN 算法属于基于价值(value-based)的算法,基于策略梯度的算法直接对策略本身进行优化。
将策略描述成一个带有参数
θ
\theta
θ 的连续函数,该函数将某个状态作为输入,输出的不再是某个确定性(deterministic)的离散动作,而是对应的动作概率分布,通常用
π
(
a
∣
s
)
\pi(a|s)
π(a∣s) 表示,称作随机性(stochastic)策略。对比之前的动作价值函数
Q
(
s
,
a
)
Q(s,a)
Q(s,a).
基于价值函数的缺点
- 无法表示连续动作。由于 DQN 等算法是通过学习状态和动作的价值函数来间接指导策略的,因此它们只能处理离散动作空间的问题,无法表示连续动作空间的问题。而在一些问题中,比如机器人的运动控制问题,连续动作空间是非常常见的,比如要控制机器人的运动速度、角度等等,这些都是连续的量。注意
- 高方差。基于价值的方法通常都是通过采样的方式来估计价值函数,这样会导致估计的方差很高,从而影响算法的收敛性。
- 探索与利用的平衡问题。DQN等算法在实现时通常选择贪心的确定性策略,而很多问题的最优策略是随机策略,即需要以不同的概率选择不同的动作。虽然可以通过 ? ? g r e e d y \epsilon-greedy ??greedy 策略等方式来实现一定程度的随机策略,但是实际上这种方式并不是很理想,因为它并不能很好地平衡探索与利用的关系。
策略梯度算法
策略梯度算法是一类直接对策略进行优化的算法,但它的优化目标与基于价值的算法是一样的,都是累积的价值期望
V
?
(
s
)
V^{\star}(s)
V?(s)。我们通常用
π
θ
(
a
∣
s
)
\pi_{\theta}(a|s)
πθ?(a∣s) 来表示策略,即在状态 s 下采取动作 a
的概率分布
p
(
a
∣
s
)
p(a|s)
p(a∣s),其中
θ
\theta
θ 是我们要去求出来的模型参数。
目标就是最大化策略的价值期望 KaTeX parse error: Undefined control sequence: \J at position 1: \?J?(\pi_{\theta}). 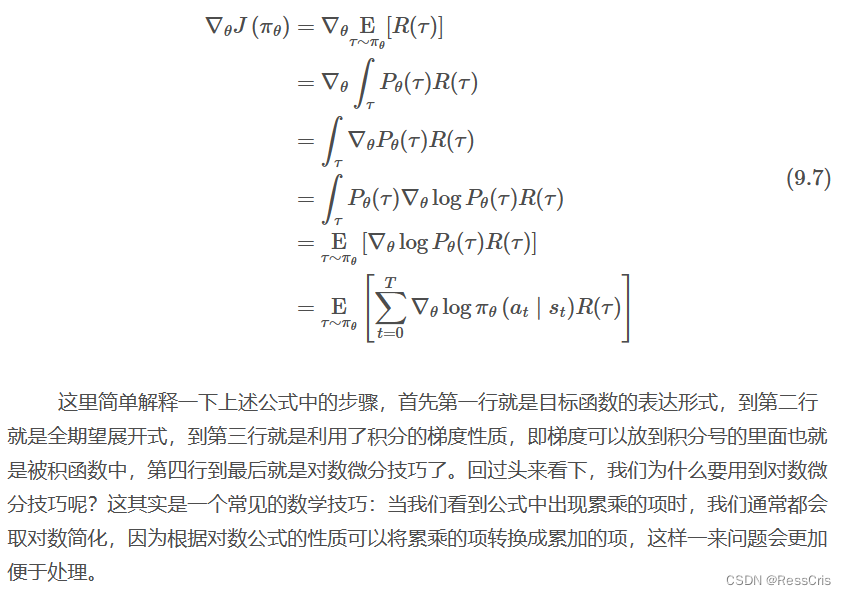
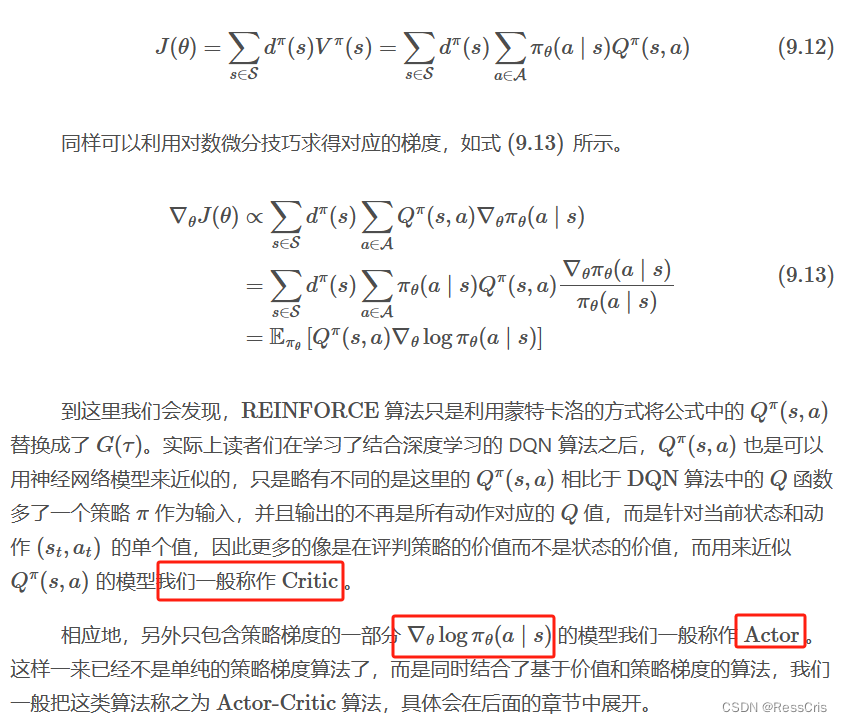
基于价值的算法是通过学习价值函数来指导策略的,而基于策略的算法则是对策略进行优化,并且通过计算轨迹的价值期望来指导策略的更新。
REINFORCE 算法
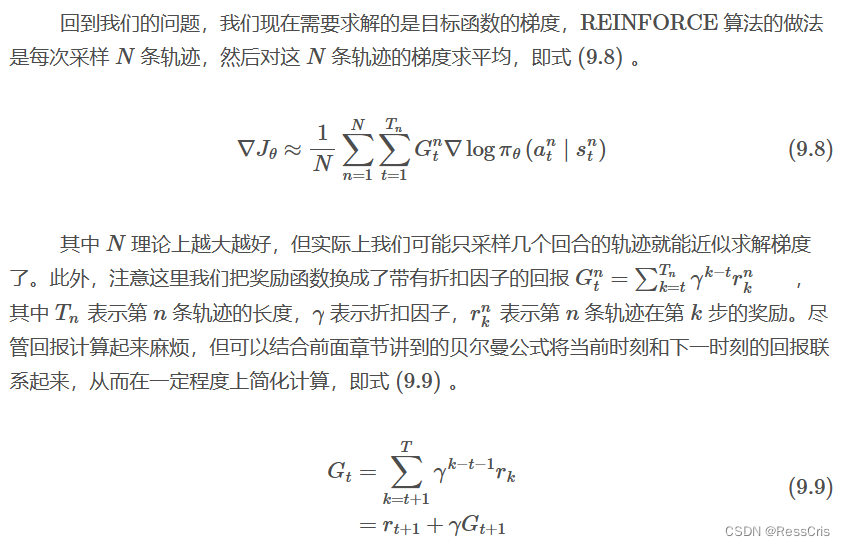
轨迹是由状态和动作组合而成的序列,实际上一方面环境的初始状态是随机的,另一方面智能体每次采取的动作是随机的,从而导致每条轨迹的长度都可能不一样,这样组合起来的轨迹几乎是无限多条的,这样一来求解目标函数的梯度就变得非常困难了。那么这个时候我们就需要利用蒙特卡洛的方法来近似求解了,即我们可以不必采样所有的轨迹,而是采样一部分且数量足够多的轨迹,然后利用这些轨迹的平均值来近似求解目标函数的梯度。这种方法就是蒙特卡洛策略梯度算法,也称作 REINFORCE 算法。
策略梯度推导进阶
平稳分布,顾名思义就是指在无外界干扰的情况下,系统长期运行之后其状态分布会趋于一个固定的分布,不再随时间变化。
平稳分布的性质
- 任意两个状态之间都是互相连通的,即任意两个状态之间都可以通过一定的步骤到达,这个性质称为连通性
- 任意状态在平稳分布下的概率都是一样的,这个性质称为细致平稳
这两个性质在马尔科夫链中是等价的,即如果一个马尔科夫链满足连通性,那么它一定满足细致平稳性,反之亦然。
策略函数的设计
离散动作的策略函数
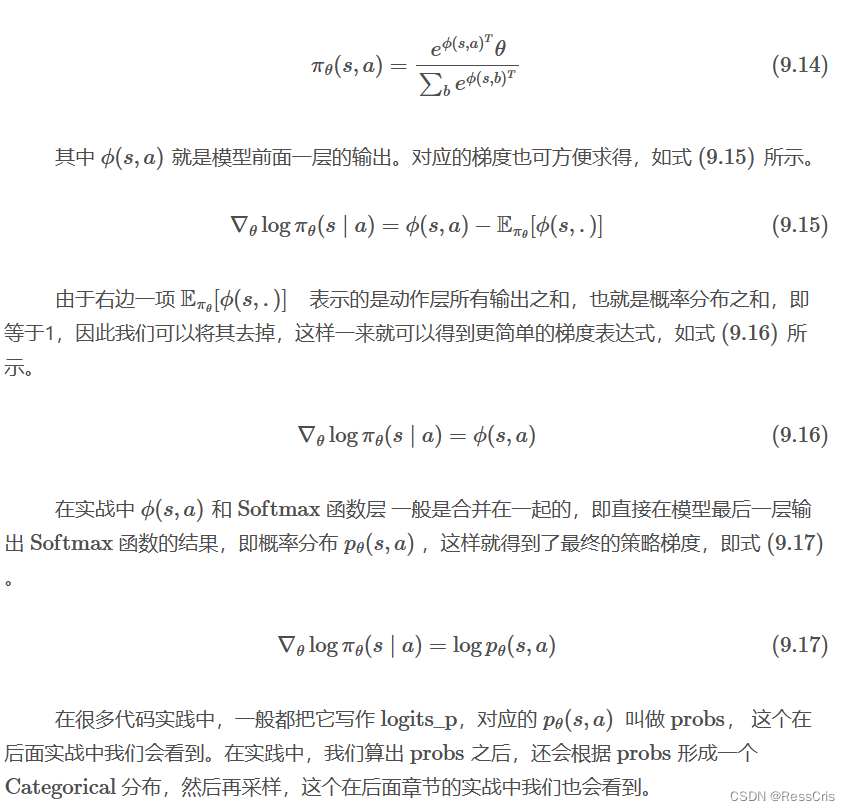
策略函数输出的是各个动作的概率分布,输入层和 DQN中的近似Q函数一样,一般是维度等于状态数的线性层。但原来 Q 网络模型输出的值有正有负,一般用 softmax 转换成概率分布。
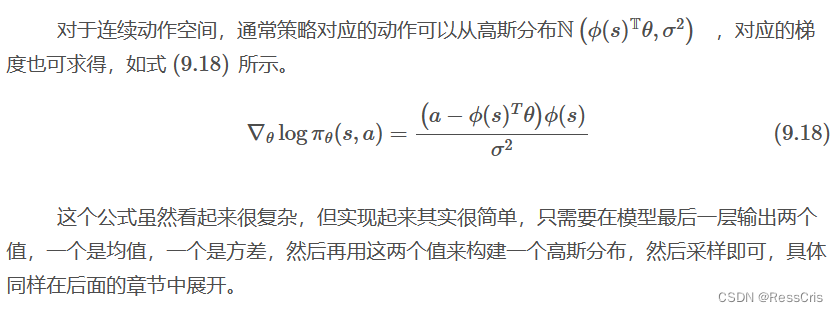
连续动作的策略函数
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- R语言【base】——merge(): 通过共同列名或行名合并两个数据帧
- 100个Python代码大全:学完这篇从Python小白到架构师
- 探讨回溯算法的秘密(Java实现)
- 融资项目——EasyExcel操作Excel文件
- centos通过yum安装redis
- linux PHP7.0安装实战步骤详细展示
- 【读书笔记】《重构_改善既有代码的设计》24种代码的坏味道
- Mysql的四大引擎,账号管理,数据库的建立
- 2023.12.22 关于 Redis 数据类型 String 常用命令
- Python 爬虫之简单的爬虫(二)