ROS---传感器集成
发布时间:2024年01月18日
ROS—传感器集成
??对于ROS机器人,如果想让其启动,我们需要逐一启动底盘控制与激光雷达,操作有点冗余。并且如果只是简单启动这些节点,那么在在 rviz 中显示时,会发现出现了TF转换异常,比如参考坐标系设置为odom时,雷达信息显示失败。
??为了解决上述问题,我们需要优化底盘、雷达相关节点的启动并通过坐标变换实现机器人底盘与里程计、雷达的关联,具体实现流程如下:
- 编写用于集成的 launch 文件;
- 发布TF坐标变换;
- 启动并测试。
1 集成的launch文件
新建功能包:
catkin_create_pkg mycar_start roscpp rospy std_msgs ros_arduino_python rplidar_ros
功能包下创建launch文件夹,launch文件夹中新建launch文件,文件名自定义(本文新建名为start.launch)。
内容如下:
<!-- 机器人启动文件:
1.启动底盘
2.启动激光雷达
-->
<launch>
<include file="$(find ros_arduino_python)/launch/arduino.launch" />
<include file="$(find rplidar_ros)/launch/rplidar_a1.launch" />
</launch>
2 坐标变换
对于ROS机器人,我们需要自定义坐标变换,新建launch文件(本文新建名为start_tf.launch)。
内容如下:
<!-- 机器人启动文件:
当不包含机器人模型时,需要发布坐标变换
-->
<launch>
<include file="$(find mycar_start)/launch/start.launch" />
<node name="rplidar2basefootprint" pkg="tf2_ros" type="static_transform_publisher" args="0 0 0.1 0 0 0 /base_footprint /laser"/>
</launch>
3 测试
启动PC端和Jetson nano端相关节点并运行查看结果。
3.1 Jetson nano端
执行机器人launch启动文件:
roslaunch mycar_start start_tf.launch
3.2 PC端
启动键盘控制节点:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
启动rviz:
rviz
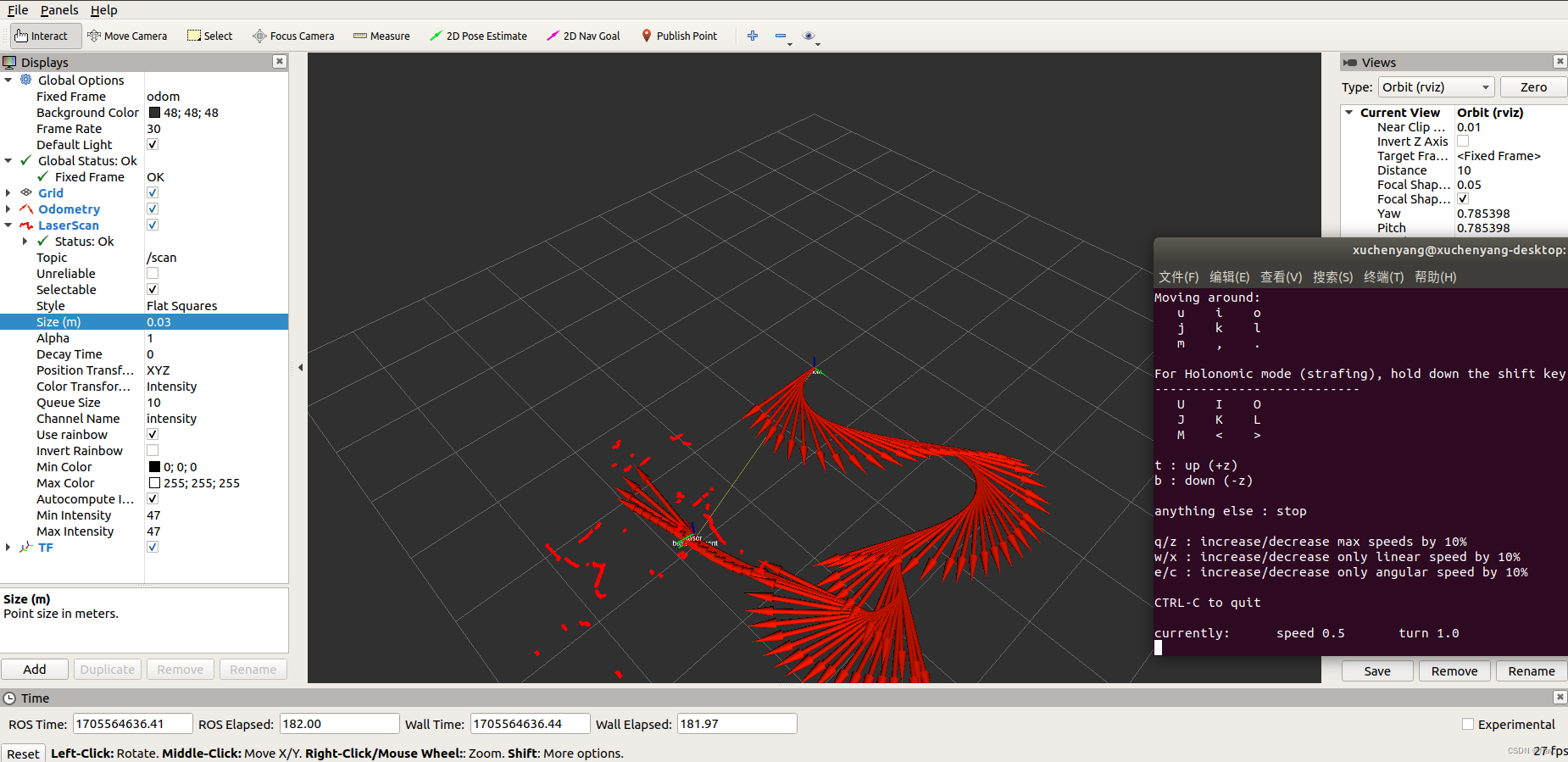
3.3 结果展示
文章来源:https://blog.csdn.net/weixin_47268803/article/details/135662062
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- WMS仓储管理系统解决方案二次分拣流程介绍
- 新颖度爆表。网络药理学+PPI+分子对接+实验验证
- 力扣14题-最长公共前缀[简单]
- 想学鸿蒙,又怕找不到工作?能有前途吗?
- FusionCharts XT 3.X NEW Crack
- 华为认证 | 有本数通HCIE在手,好就业吗?
- 【C语言】ipoib驱动 - ipoib_cm_post_receive_nonsrq_rss函数
- ASP.NET MVC实战之权限拦截Authorize使用
- Postman接口测试工具最全实用教程
- 【高等数学之不定积分】