day2:TCP、UDP网络通信模型
发布时间:2024年01月15日
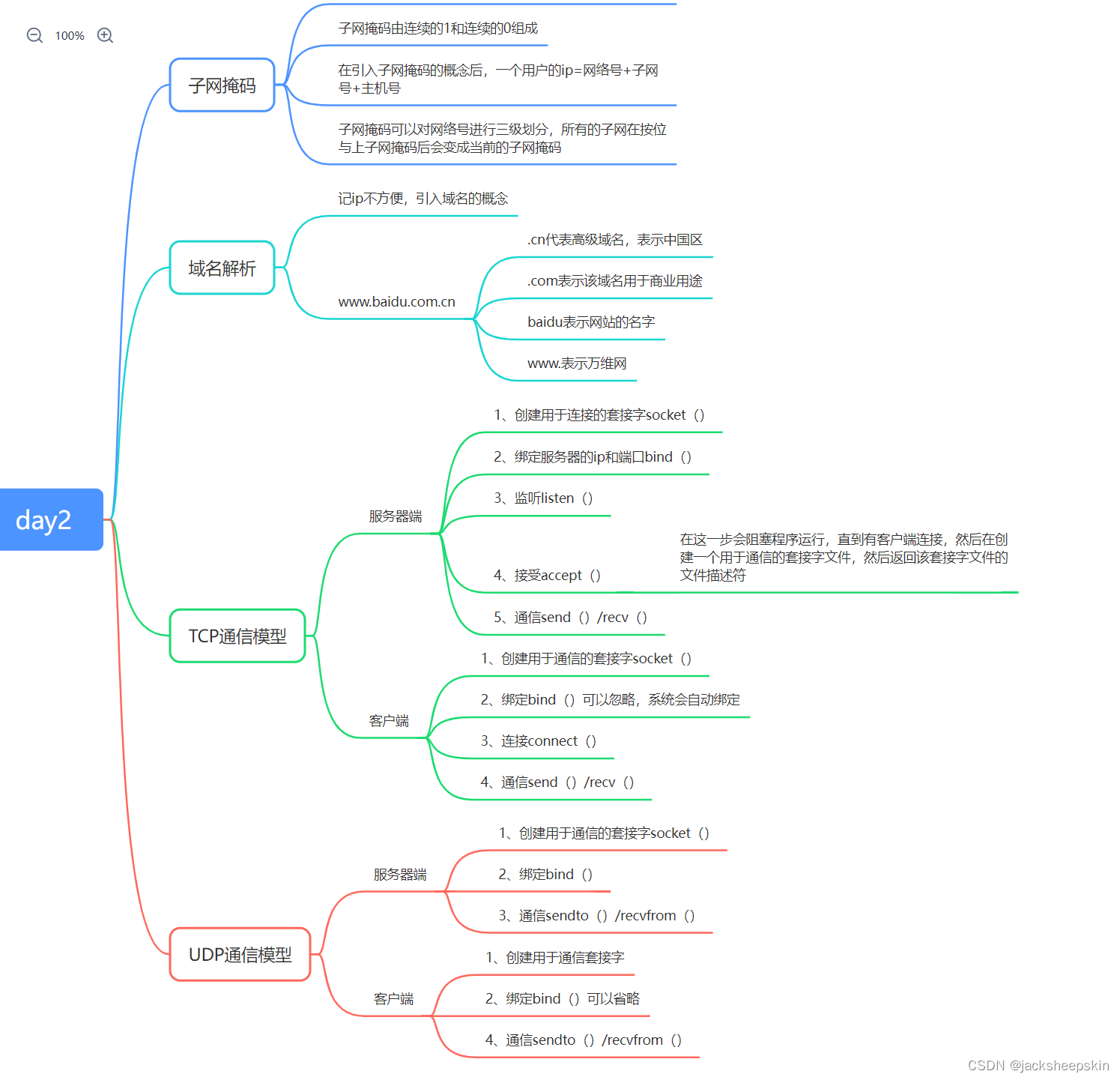
思维导图
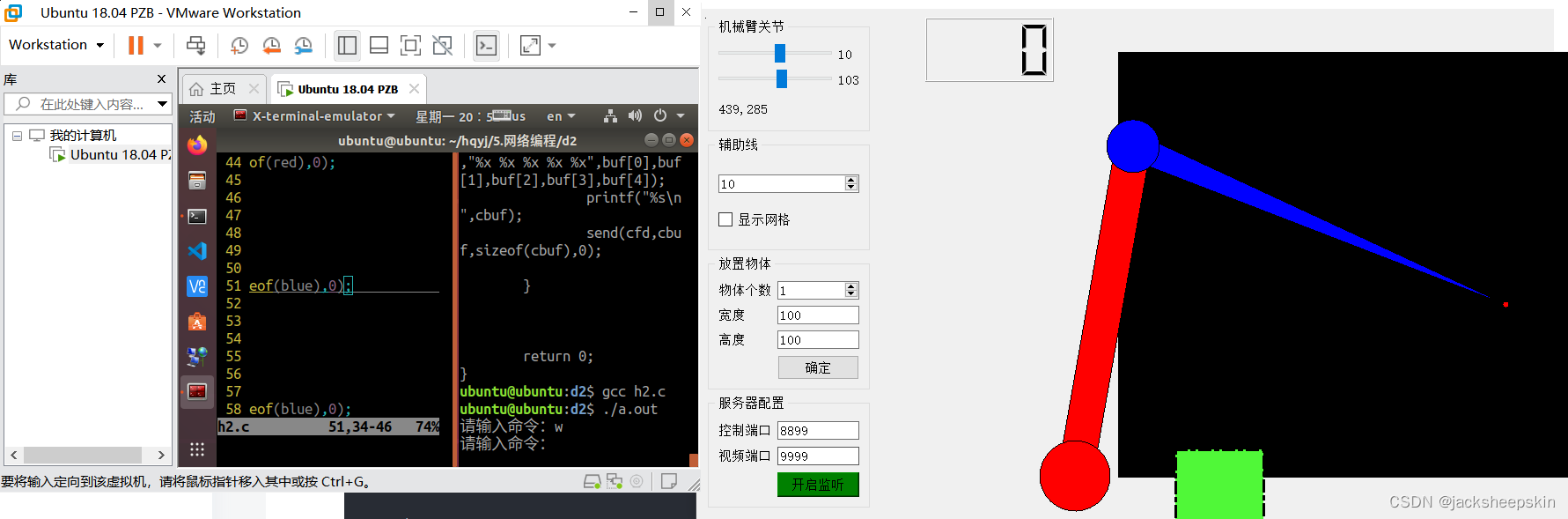
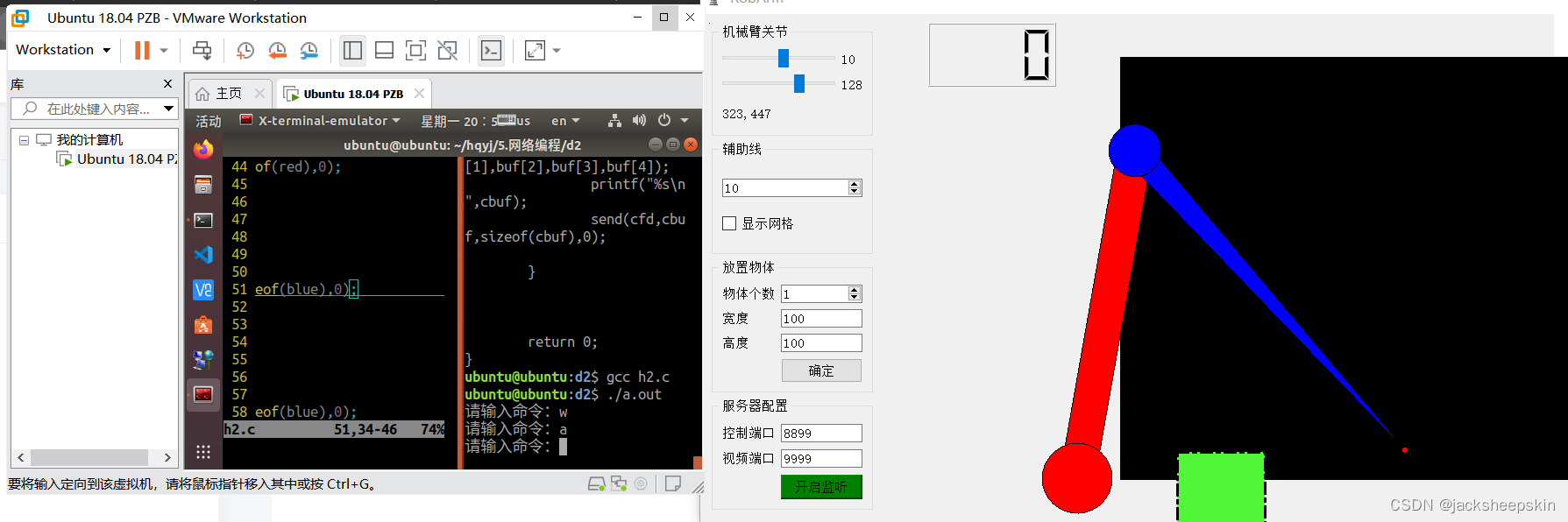
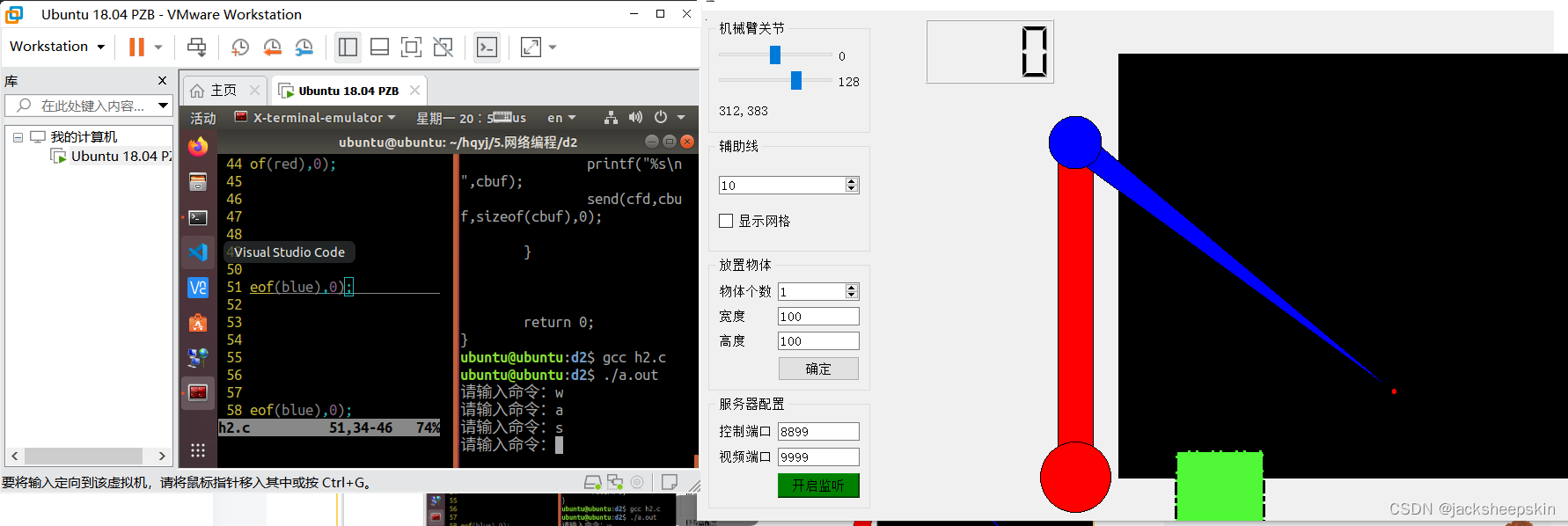
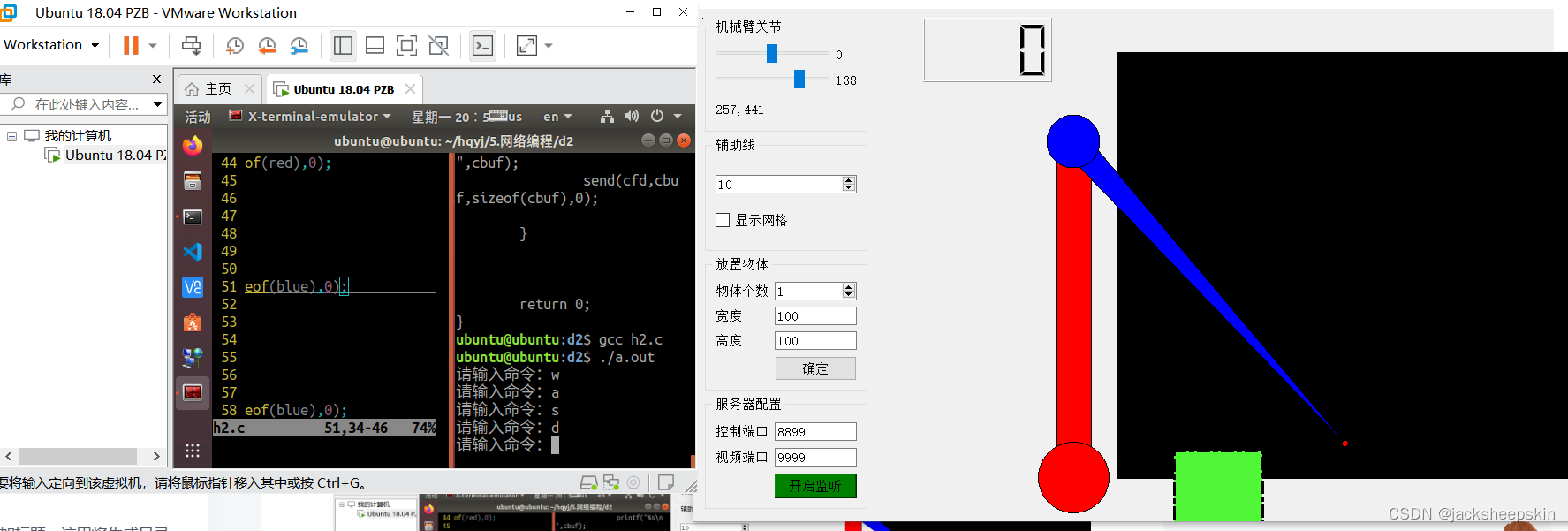
机械臂实现
#include <head.h>
#define SER_POTR 8899
#define SER_IP "192.168.125.223"
int main(int argc, const char *argv[])
{
//创建套接字
int cfd=socket(AF_INET,SOCK_STREAM,0);
if(cfd==-1)
{
perror("");
return -1;
}
//链接
struct sockaddr_in sin;
sin.sin_family=AF_INET;
sin.sin_port=htons(SER_POTR);
sin.sin_addr.s_addr=inet_addr(SER_IP);
if(connect(cfd,(struct sockaddr*)&sin,sizeof(sin))==-1)
{
perror("connect error:");
return -1;
}
int buf[5];
buf[0]=0xff;
buf[1]=0x02;
buf[2]=0x00;
buf[3]=0x5a;
buf[4]=0xff;
char cbuf[128]="";
sprintf(cbuf,"%x %x %x %x %x",buf[0],buf[1],buf[2],buf[3],buf[4]);
send(cfd,cbuf,sizeof(cbuf),0);
while(1)
{
char cmd;
printf("请输入命令:");
scanf("%c",&cmd);
getchar();
switch(cmd)
{
case 'w':
{
buf[2]=0;
buf[3]++;
break;
}
case 's':
{
buf[2]=0;
buf[3]--;
break;
}
case 'a':
{
buf[2]=1;
buf[3]--;
break;
}
case 'd':
{
buf[2]=1;
buf[3]++;
break;
}
default:
{
printf("输入有误\n");
}
}
sprintf(cbuf,"%x %x %x %x %x",buf[0],buf[1],buf[2],buf[3],buf[4]);
printf("%s\n",cbuf);
send(cfd,cbuf,sizeof(cbuf),0);
}
return 0;
}
按下后机械臂反应
文章来源:https://blog.csdn.net/jackwolfskin2/article/details/135610755
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Visual Studio Code 中,通过显示波浪线来提示代码中存在的错误或警告
- 贝塞尔曲线(Bezier Curve)原理、公式推导及matlab代码实现
- uniCloud uni-id体系的使用
- Stable Diffusion中几个常用的文件夹
- 为什么MOS管很容易失效?有哪些失效?
- Text2SQL学习整理(五)将Text-to-SQL任务与基本语言模型结合
- 2024年阿里云、腾讯云、华为云、LightNode、硅云服务器如何选?怎么买最划算?[最新价格表]
- 【C++】—— C++的IO流
- 华为机试真题实战应用【赛题代码篇】-分班问题(附Java、C++和python代码)
- MySQL常用命令合集(Mac版)