【图像拼接】源码精读:Perception-based seam cutting for image stitching
第一次来请先看这篇文章:【图像拼接(Image Stitching)】关于【图像拼接论文源码精读】专栏的相关说明,包含专栏内文章结构说明、源码阅读顺序、培养代码能力、如何创新等(不定期更新)
【图像拼接论文源码精读】专栏文章目录
- 【源码精读】As-Projective-As-Possible Image Stitching with Moving DLT(APAP)第一部分:全局单应Global homography
- 【图像拼接】源码精读:Seam-guided local alignment and stitching for large parallax images
文章目录
前言
论文题目:Perception-based seam cutting for image stitching——基于感知的接缝剪裁图像拼接方法
论文链接:Perception-based seam cutting for image stitching
论文源码:Perception-based seam cutting for image stitching
注:matlab源码,相关算法是C++封装的。主要是对matlab的学习与理解。
论文精读:【图像拼接】论文精读:Perception-based seam cutting for image stitching
配合【论文精读】专栏对应文章阅读,效果更佳!
注:请重点关注代码段中的注释!!!有一些讲解的东西直接写在代码段的注释中了,同时多关注红色字体和绿色字体!!!
1. 跑通代码,得到结果
任何源码下载下来后,第一件事就是先跑通。
无论你是否要在该工作的基础上创新,总是需要得到拼接结果,在论文的实验部分做对比。
所以,请务必跑通,得到拼接结果。
1.1 准备工作
本地需要matlab环境,我是MATLAB R2018b,选择一个适中的matlab版本即可。(最新的matlab2023可以使用局部函数了,类似jupyter notebook,感兴趣的同学可以试试最新版。)
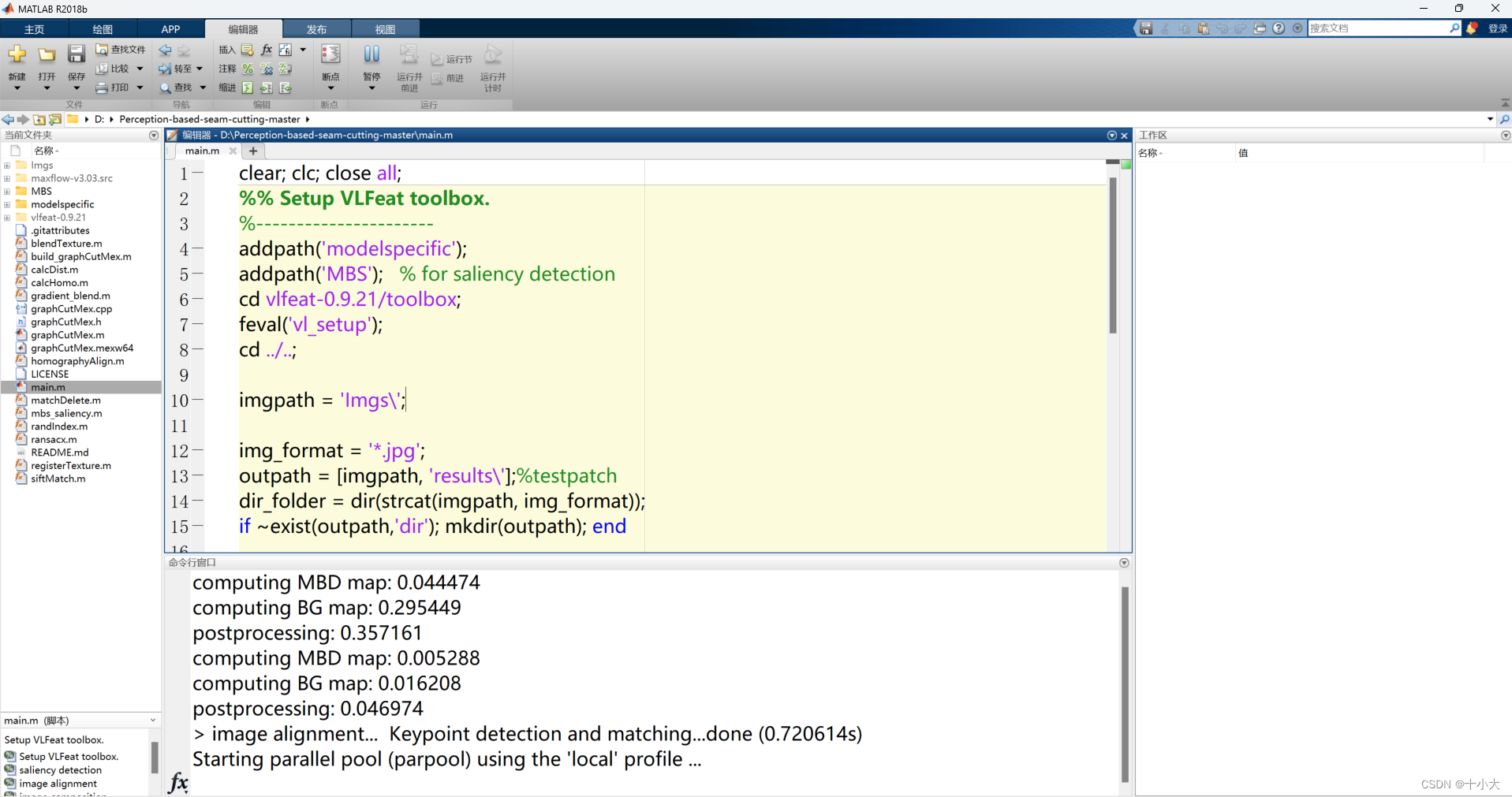
源码下载下来后,用matlab打开项目,界面如下:

左侧是文件目录结构,中级是当前所选文件代码,下面是命令行窗口,右侧是工作区(运行后显示相关变量的值)
1.2 尝试运行
点击上面菜单栏【运行】,出现如下报错:

检查后发现,vlfeat-0.9.21文件夹为空,则将其他源码中的该文件夹复制过来,同时将输入图像文件夹Imgs准备好。
vlfeat-0.9.21下载链接(已经配置好,复制到源码目录下可以直接使用):图像拼接论文源码matlab所需的vlfeat-0.9.21库,已经配置好,复制到源码目录下即可直接使用
建议直接下载该配置好的,其他源码中的vlfeat-0.9.21可能会有报错说找不到vl_sift。
再次运行,出现如下编译错误:
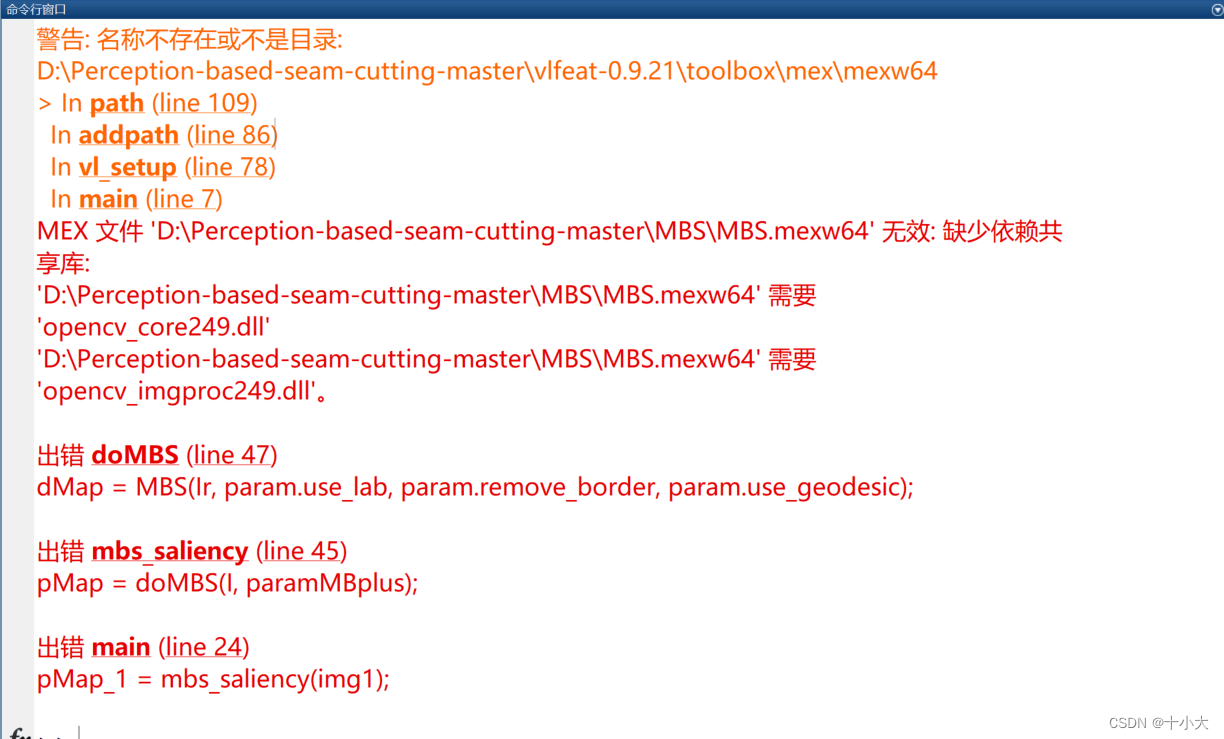
提示缺少opencv的依赖库。
解决办法1:用我自己已经编译好的MBS.mexw64配合两个opencv的dll库,下载后放到该目录中,直接解决所有的问题。(节约时间)
三个文件的下载链接:论文Perception-based seam cutting for image stitching所需的MBS依赖库
完成后直接跳过解决办法2。
解决办法2:自己一步一步编译MBS库(非常费时间,建议直接使用解决方法1,本方法可能会有其他报错)
下载opencv2.4.9:https://opencv.org/releases/page/7/
根据自己的设备,选择版本(我的是windows)。下载完毕后安装,路径为D:\opencv2.4.9即可。目的是路径位置与MBS中的路径一致:

安装完成后,会在该路径下看见上面报错的两个库文件:

除了补充opencv的库文件外,上述报错的深层含义是我们需要提前编译好MBS中的.cpp文件,具体查看MBS中的readme:
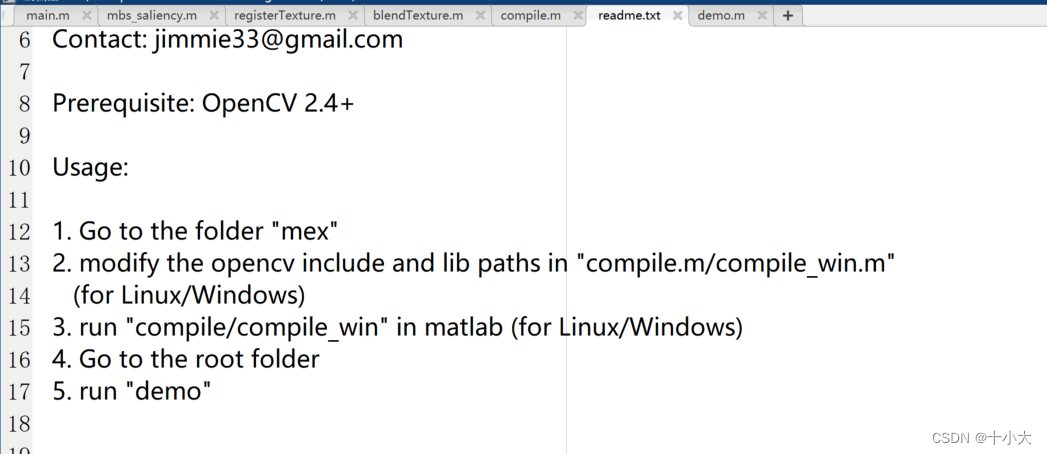
我们将matlab的路径前进到MBS文件夹,然后执行compile.m:
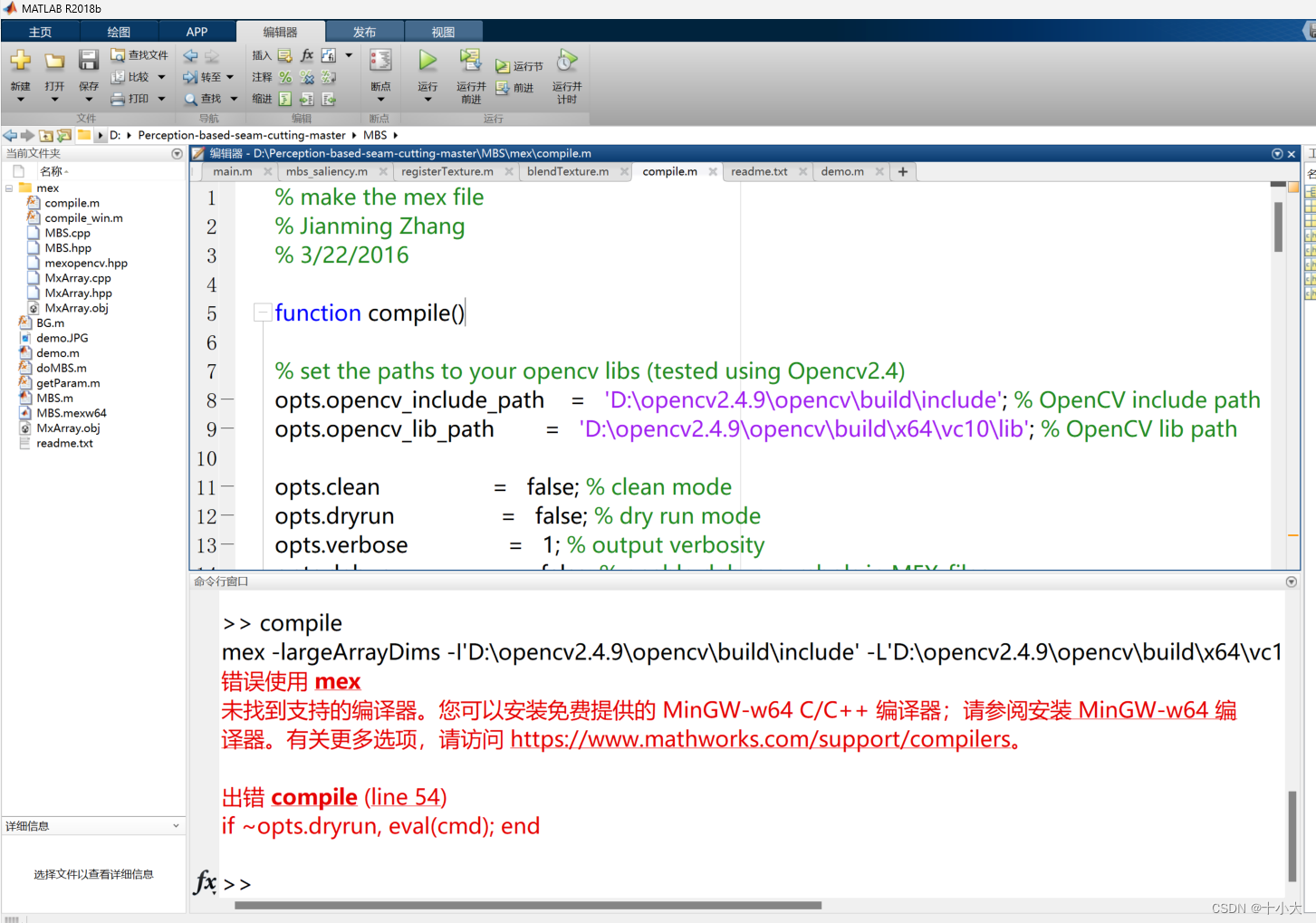
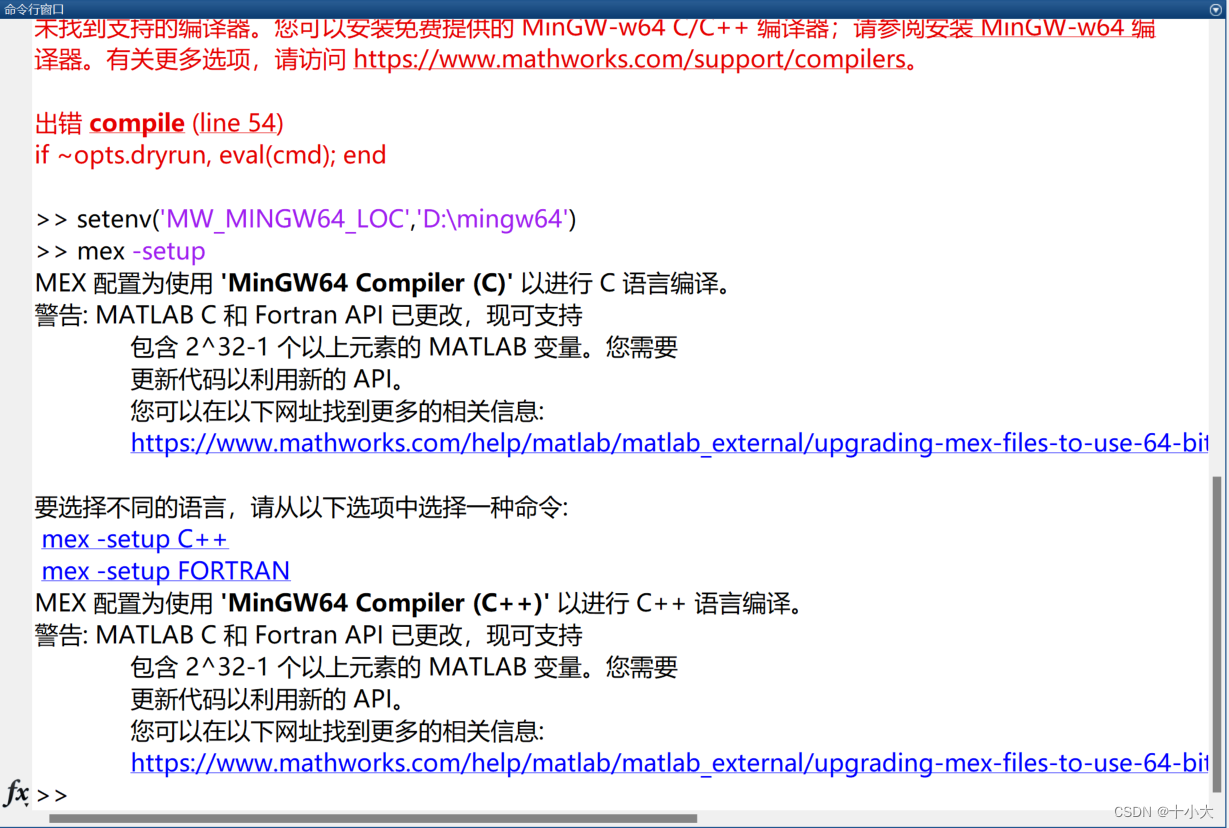
如果出现上述错误,说明你的电脑中没有该编译器,此时有两种方式解决:
- 安装VS。如果你有C/C++需求的话,这么做最简单。
- 单独安装MinGW-w64。
第2种方式的安装包下载地址:添加链接描述
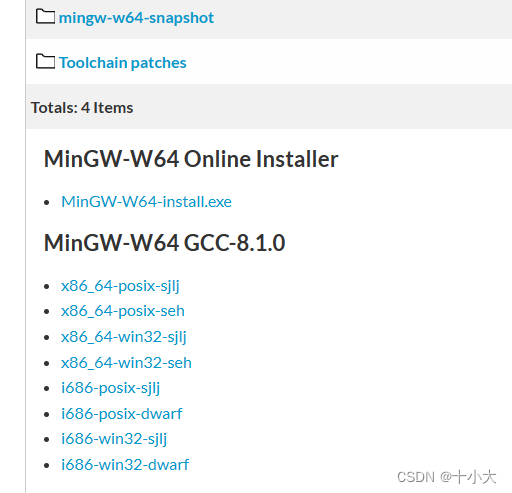
选择【x86_64-win32-seh】压缩包。(直接下载安装包会有安装错误!!!)
下载完成后,解压到D盘,目录为:D:\mingw64。
将其添加到环境变量中:
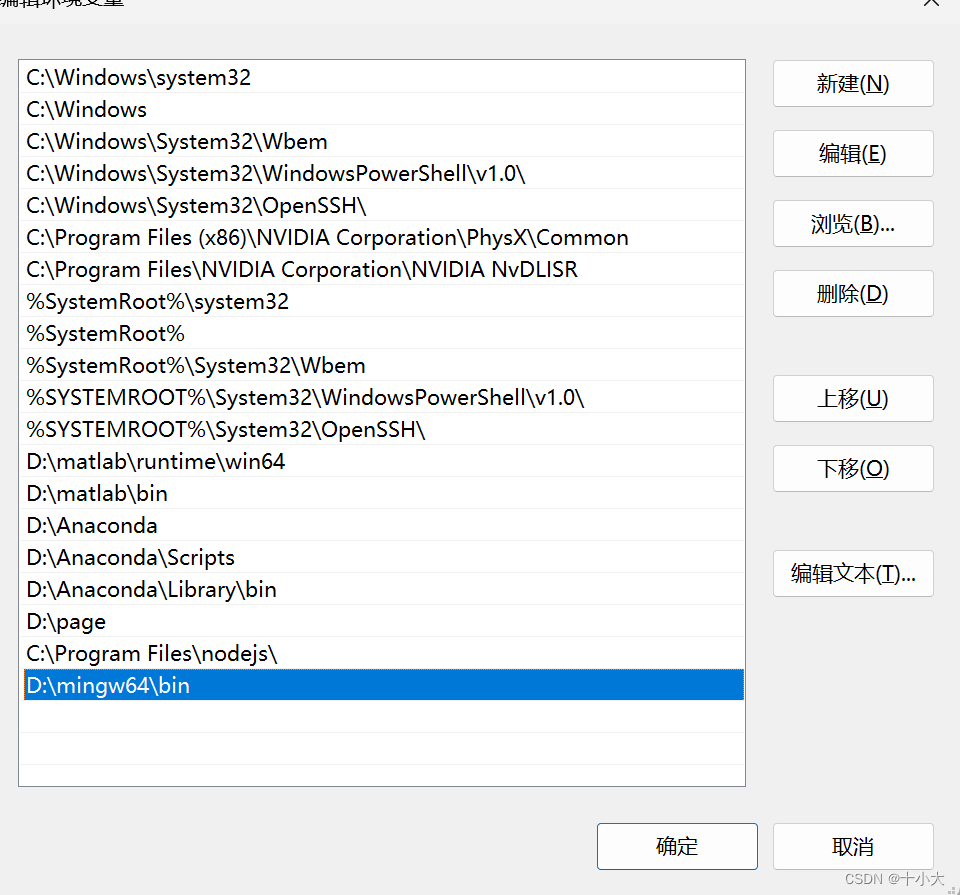
在matlab命令行输入:setenv('MW_MINGW64_LOC','D:\mingw64')和mex -setup,选择C++。
运行compile.m编译MBS,编译完成后,运行demo.m测试MBS是否有效果:

此时,MBS编译完成。再回到主目录运行main.m,代码已经可以完整的跑通了。
1.3 得到拼接结果
附上原作者README中的使用方法:
2. 源码解读,看懂原理
本节将按照main.m中的代码顺序进行【模块化】讲解,包括与论文中的算法对应、matlab语法和函数学习、变量的类型和值、函数功能等方面。代码段中包含原作者的注释和我做的注释,与讲解结合着阅读。
2.1 参数与输入图像
代码如下:
clear; clc; close all;
%% Setup VLFeat toolbox.
%----------------------
addpath('modelspecific');
addpath('MBS'); % for saliency detection
cd vlfeat-0.9.21/toolbox;
feval('vl_setup');
cd ../..;
imgpath = 'Imgs\';
img_format = '*.jpg';
outpath = [imgpath, 'results\'];%testpatch
dir_folder = dir(strcat(imgpath, img_format));
if ~exist(outpath,'dir'); mkdir(outpath); end
path1 = sprintf('%s%s',imgpath, dir_folder(1).name); %
path2 = sprintf('%s%s',imgpath, dir_folder(2).name); %
img1 = im2double(imread(path1)); % target image
img2 = im2double(imread(path2)); % reference image
2.2 显著性检测
代码如下:
%% saliency detection
pMap_1 = mbs_saliency(img1);
pMap_2 = mbs_saliency(img2);
对两张输入图像进行显著性检测。
2.2.1 mbs_saliency函数
略。论文Minimum Barrier Salient Object Detection at 80 FPS详解。
2.2.2 添加可视化代码
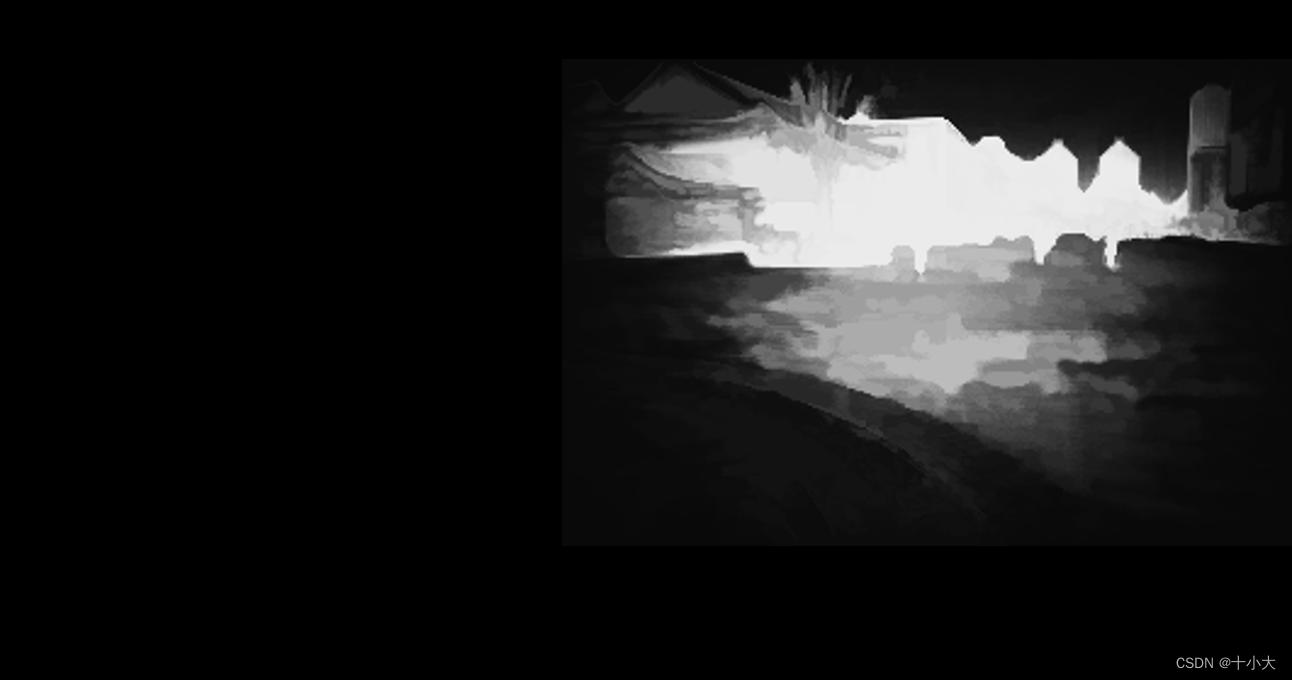
我们添加可视化代码,显示显著性检测结果:
figure,imshow(pMap_1);
title('Saliency detection for img1');
outpathfile = 'Saliency detection for img1.jpg';
imwrite(pMap_1,[outpath,outpathfile]);
figure,imshow(pMap_2);
title('Saliency detection for img2');
outpathfile = 'Saliency detection for img2.jpg';
imwrite(pMap_2,[outpath,outpathfile]);
得到两张图像的显著性检测结果:


2.3 图像对齐
main.m中的代码:
%% image alignment
fprintf('> image alignment...');tic;
[warped_img1, warped_pmap1, warped_img2, warped_pmap2] = registerTexture(img1, pMap_1, img2, pMap_2, imgpath);
fprintf('done (%fs)\n', toc);
2.3.1 registerTexture函数
function [warped_img1, warped_pmap1, warped_img2, warped_pmap2] = registerTexture(img1, pmap1, img2, pmap2, txtpath)
% given two images(img1 target, img2 reference),
% detect and match sift features, estimate homography transformation
% and calculate alignment result
% 函数功能:根据两幅原图和两幅显著图对齐纹理
% 输入:图1,显著图1,图2,显著图2,图像路径
% 输出:单应变换后的四个图
[pts1, pts2] = siftMatch(img1, img2);
Sz1 = max(size(img1,1),size(img2,1)); % to avoid the two images have different resolution
Sz2 = max(size(img1,2),size(img2,2));
[matches_1, matches_2] = matchDelete(pts1, pts2, Sz1, Sz2); % delete wrong match features
f = figure;
imshow([img2 img1],'border','tight');
hold on;
plot(matches_2(1,:),matches_2(2,:),'go','LineWidth',2);
plot(matches_1(1,:)+size(img2,2),matches_1(2,:),'go','LineWidth',2);
plot([matches_2(1,:);matches_1(1,:)+size(img2,2)],[matches_2(2,:);matches_1(2,:)],'g-');
init_H = calcHomo(matches_1, matches_2); % fundamental homography
[warped_img1, warped_pmap1, warped_img2, warped_pmap2] = homographyAlign(img1, pmap1, img2, pmap2, init_H);
end
其中,SIFT检测特征点函数siftMatch、RANSAC剔除异常值函数matchDelete、计算单应矩阵函数calcHomo、根据单应对齐函数homographyAlign与Seam-guided local alignment and stitching for large parallax images和Quality evaluation-based iterative seam estimation for image stitching两篇论文源码中的函数几乎一致,可以去看另外两篇源码精读,本文略。
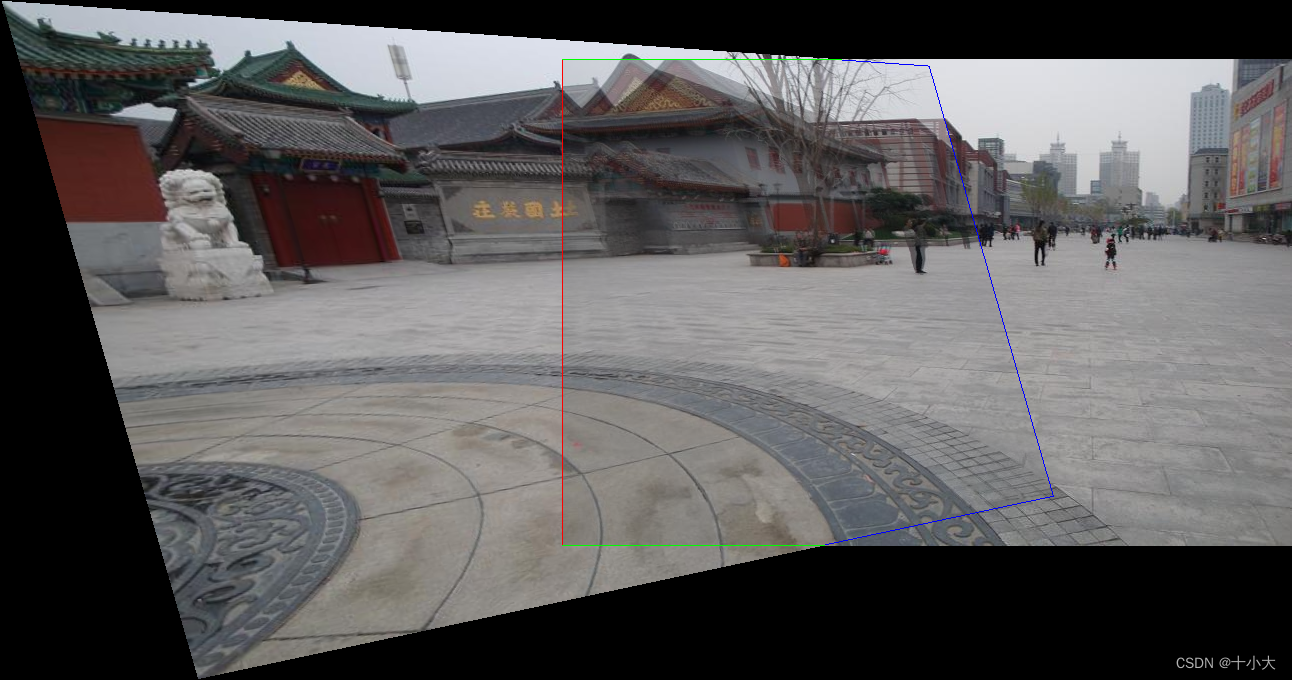
我们在其中添加了对应匹配点的可视化,结果如下:
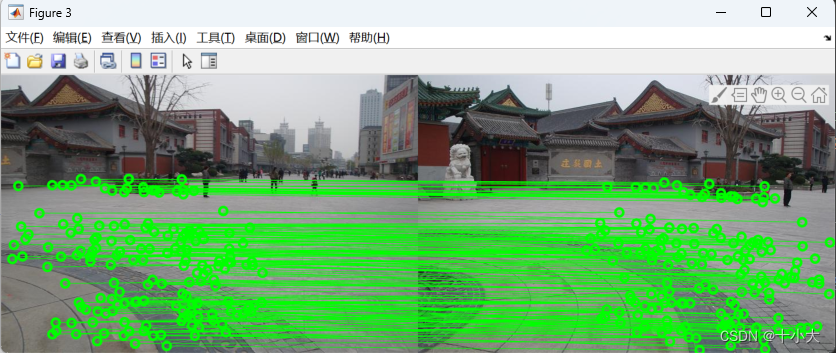
在main.m中的图像对齐代码段末尾,添加如下可视化代码:
figure,imshow(warped_img1);
title('warped_img1');
outpathfile = 'warped_img1.jpg';
imwrite(warped_img1,[outpath,outpathfile]);
figure,imshow(warped_pmap1);
title('warped_pmap1');
outpathfile = 'warped_pmap1.jpg';
imwrite(warped_pmap1,[outpath,outpathfile]);
figure,imshow(warped_img2);
title('warped_img2');
outpathfile = 'warped_img2.jpg';
imwrite(warped_img2,[outpath,outpathfile]);
figure,imshow(warped_pmap2);
title('warped_pmap2');
outpathfile = 'warped_pmap2.jpg';
imwrite(warped_pmap2,[outpath,outpathfile]);
翘曲对齐后的原图像与显著图:


2.4 接缝融合,blendTexture函数
本文2.4.2中的数据项,对应论文2.1中的数据项公式(2)
本文2.4.3中的平滑项(欧氏准则),对应论文2.1中的平滑项公式(3)
本文2.4.3中的平滑项(sigmoid准则),对应论文2.2.1 中的平滑项公式(6)
本文2.4.3中的平滑项的显著性权重,对应论文2.2.2 中的公式(8);即最终的能量函数(论文中公式(9))由本节代码中的【数据项+显著权重*sigmoid准则下的平滑项】实现。
代码如下:
%% image composition
fprintf('> seam cutting...');tic;
imgout = blendTexture(warped_img1, warped_pmap1, warped_img2, warped_pmap2);
fprintf('done (%fs)\n', toc);
2.4.1 预处理
% img1Homo:aligned target image
% pmap1Homo: salient target image
% img2Homo:aligned reference image
% pmap2Homo: salient reference image
%% pre-process of blendtexture
w1 = imfill(imbinarize(rgb2gray(warped_img1), 0),'holes');
w2 = imfill(imbinarize(rgb2gray(warped_img2), 0),'holes');
A = w1; B = w2;
C = A & B; % mask of overlapping region
[ sz1, sz2 ]=size(C); %
ind = find(C); % index of overlapping region
nNodes = size(ind,1); %重叠区域索引1列
revindC = zeros(sz1*sz2,1);%每个像素值先置为0
revindC(C) = 1:length(ind); %循环变量1到像素个数
[m,~] = find(C);
minrow = min(m); %索引最小,最大行
maxrow = max(m);
2.4.2 找到重叠区域边界并得到数据项
%% terminalWeights, choose source and sink nodes
% 选择源点和汇点,一个不错的找重叠区域边界的方法
% border of overlapping region 图2
BR=(B-[B(:,2:end) false(sz1,1)])>0; %重叠区域右边界(范围,是矩形)
BL=(B-[false(sz1,1) B(:,1:end-1)])>0; %重叠区域左边界
BD=(B-[B(2:end,:);false(1,sz2)])>0; %重叠区域下边界
BU=(B-[false(1,sz2);B(1:end-1,:)])>0; %重叠区域上边界
CR=(C-[C(:,2:end) false(sz1,1)])>0; %图1
CL=(C-[false(sz1,1) C(:,1:end-1)])>0;
CD=(C-[C(2:end,:);false(1,sz2)])>0;
CU=(C-[false(1,sz2);C(1:end-1,:)])>0;
%左图重叠区域的边界(重叠区域右侧,真实边界,红色边界)
imgseedR=(BR|BL|BD|BU)&(CR|CL|CD|CU); %RED
imgseedB = (CR|CL|CD|CU) & ~imgseedR; %BLUE
% data term
tw=zeros(nNodes,2);
tw(revindC(imgseedB),2)=inf; %蓝色对应像素索引,将tw第二列设置为inf
tw(revindC(imgseedR),1)=inf;
mask=~(imgseedB | imgseedR); %掩码 重叠区域边界为0
imglap = 0.5.*imadd(warped_img1.*cat(3,mask&C,mask&C,mask&C), warped_img2.*cat(3,mask&C,mask&C,mask&C));
% imglap = 1.*imadd(warped_img1.*cat(3,mask&C,mask&C,mask&C), warped_img2.*cat(3,mask&C,mask&C,mask&C));
freeseed = imgseedR;
freeseed(minrow,:) = 0;
freeseed(maxrow,:) = 0;
free_seed = imgseedR & (~freeseed);
% saliency weights
%======================
tw(revindC(free_seed),1) = 0;
tw(revindC(free_seed),2) = 0;
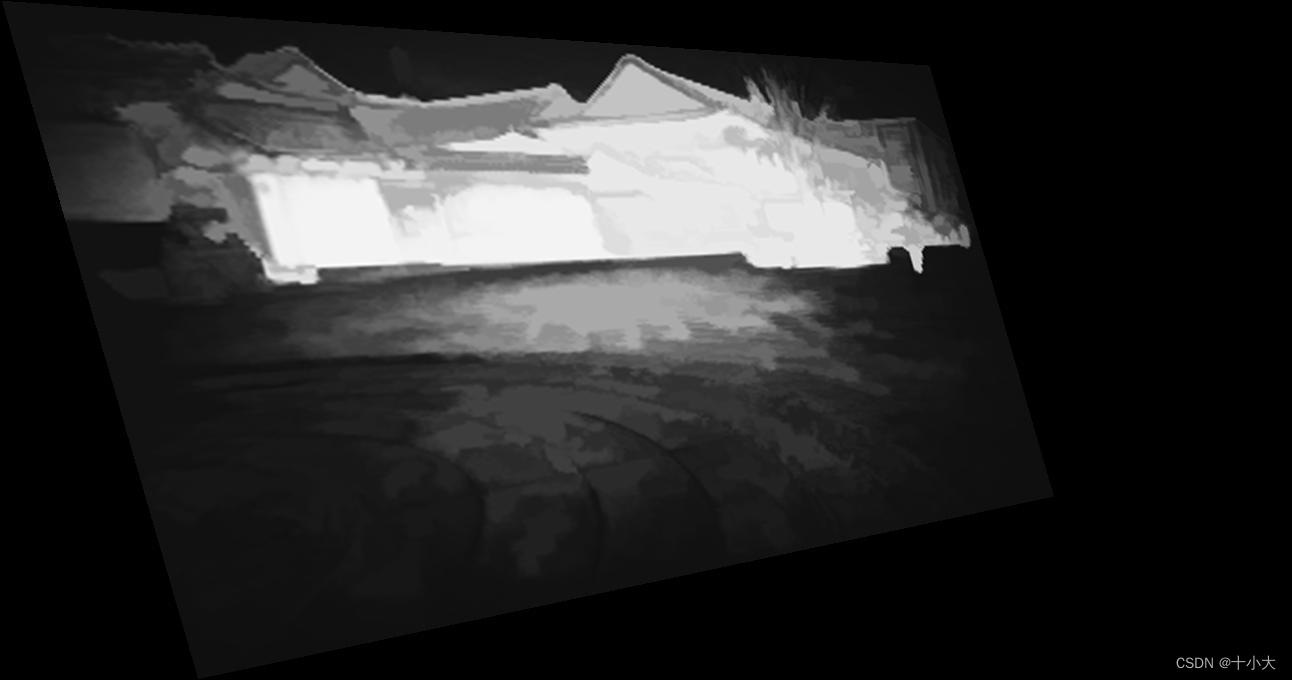
imgseed = warped_img1.*cat(3,A-C,A-C,A-C) + warped_img2.*cat(3,B-C,B-C,B-C) + imglap+cat(3,freeseed,free_seed,imgseedB);
%======================
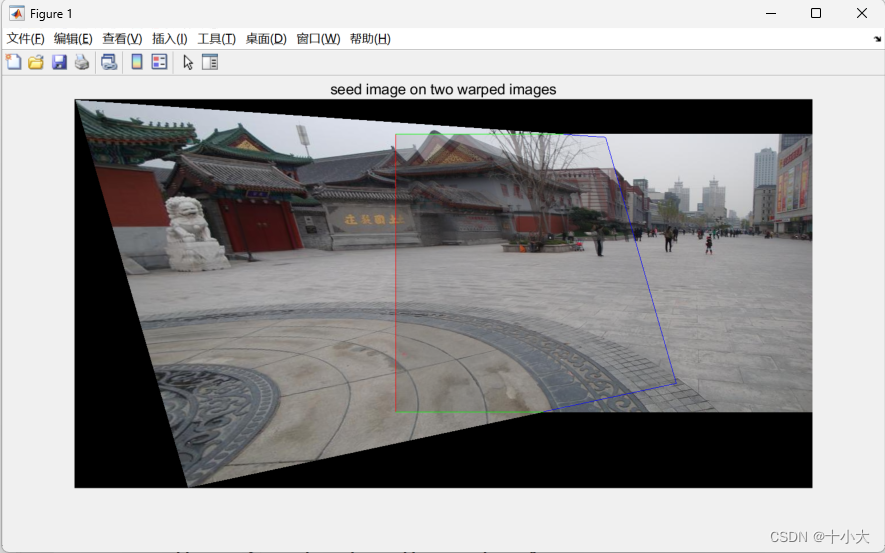
figure,imshow(imgseed);
title('seed image on two warped images');
terminalWeights=tw; % data term
pngout = sprintf('Overlapping_result.png');
imwrite(imgseed,pngout);
重叠区域可视化:
2.4.2 计算权重并得到平滑项(本文核心)
%% calculate edgeWeights
CL1=C&[C(:,2:end) false(sz1,1)];
CL2=[false(sz1,1) CL1(:,1:end-1)];
CU1=C&[C(2:end,:);false(1,sz2)];
CU2=[false(1,sz2);CU1(1:end-1,:)];
blurred1 = warped_img1; blurred2 = warped_img2;
% edgeWeights: Euclidean or sigmoid or saliency-weighted sigmoid norm
% 论文2.1
ang_1=blurred1(:,:,1); sat_1=blurred1(:,:,2); val_1=blurred1(:,:,3);
ang_2=blurred2(:,:,1); sat_2=blurred2(:,:,2); val_2=blurred2(:,:,3);
% baseline difference map
imgdif = sqrt( ( (ang_1.*C-ang_2.*C).^2+(sat_1.*C-sat_2.*C).^2+ (val_1.*C-val_2.*C).^2 )./3);
% 论文2.2.1
% sigmoid-metric difference map
a_rgb = 0.06; % bin of histogram
beta=4/a_rgb; % beta
gamma=exp(1); % base number
para_alpha = histOstu(imgdif(C), a_rgb); % parameter:tau
imgdif_sig = 1./(1+power(gamma,beta*(-imgdif+para_alpha))); %公式(5) difference map with logistic function
imgdif_sig = imgdif_sig.*C; % difference to compute the smoothness term
% saliency-weighted sigmoid difference map
saliency_map = ((warped_pmap1 + warped_pmap2)./2).*C; % the saliency of overlapping region
imgdif_sal = imgdif_sig.*(1 + saliency_map); %公式(8) difference to compute the smoothness term
% saliency-weighted sigmoid method
DL = (imgdif_sal(CL1)+imgdif_sal(CL2))./2;
DU = (imgdif_sal(CU1)+imgdif_sal(CU2))./2;
% smoothness term
edgeWeights=[
revindC(CL1) revindC(CL2) DL+1e-8 DL+1e-8;
revindC(CU1) revindC(CU2) DU+1e-8 DU+1e-8
];
用来确定最大类间方差tou的Ostu算法:
function [ alpha ] = histOstu(edge_D, interval_rgb)
% use Ostu's method to compute the parameter of logistic function
xbins = 0+interval_rgb/2:interval_rgb:1-interval_rgb/2;
num_x = size(xbins,2);
counts = hist(edge_D, xbins);
%figure,hist(edge_D, xbins);
num = sum(counts);
pro_c = counts./num;
ut_c = pro_c.*xbins;
sum_ut = sum(ut_c);
energy_max = 0;
for k=1:num_x
uk_c = pro_c(1:k).*xbins(1:k);
sum_uk = sum(uk_c);
sum_wk = sum(pro_c(1:k));
sigma_c = (sum_uk-sum_ut*sum_wk).^2/(sum_wk*(1-sum_wk));
if sigma_c>energy_max
energy_max = sigma_c;
threshold = k;
end
end
alpha = xbins(threshold)+interval_rgb/2;
end
图割算法,得到拼接结果
%% graph-cut labeling
[~, labels] = graphCutMex(terminalWeights,edgeWeights);
As=A;
Bs=B;
As(ind(labels==1))=false; % mask of target seam
Bs(ind(labels==0))=false; % mask of reference seam
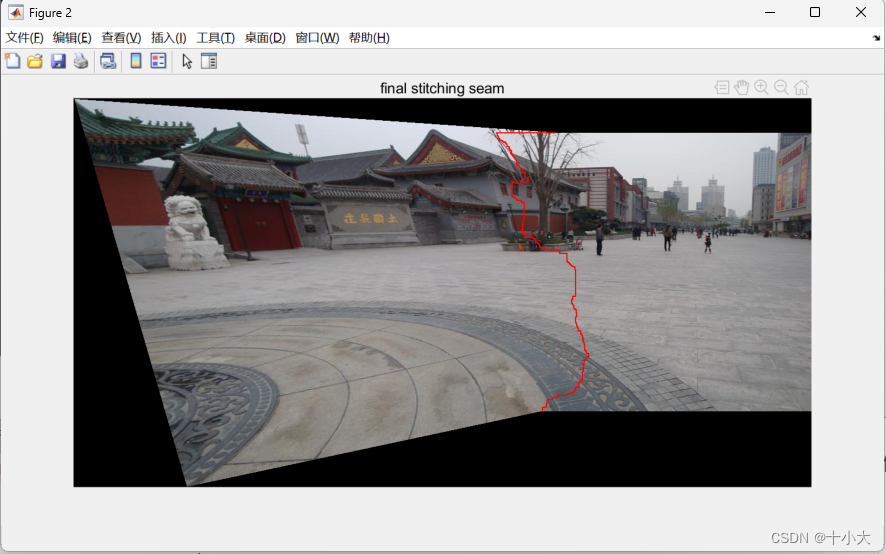
imgout = gradient_blend(warped_img1, As, warped_img2);
% 在全尺寸拼接结果中显示缝合线
SE_seam = strel('square', 3);
As_seam_ = imdilate(As, SE_seam);
Bs_seam_ = imdilate(Bs, SE_seam);
Cs_seam_ = As_seam_ & Bs_seam_;
imgseam = imgout.*cat(3,(A|B)-Cs_seam_,(A|B)-Cs_seam_,(A|B)-Cs_seam_) + cat(3,Cs_seam_,zeros(sz1,sz2),zeros(sz1,sz2));
figure,imshow(imgseam);
title('final stitching seam');

至此,本文的代码已解读完毕。
3. 总结思考,试图创新
论文贡献:
- 提出一个基本感知的接缝拼接方法,几乎和人类预想的拼接缝一致。
- 该方法可以集成到任何拼接方法流中。
也就是说,如果基于接缝的拼接方法没有创新了,那么就考虑排列组合,将最好的接缝融合方法放到你的拼接算法流程中,作为一个创新点。
算法流程回顾:

输入:重叠区域P和翘曲后的两张图像
输出:拼接结果
- 用欧式准则计算两张输入图像的差异(颜色差异)。
- 用Ostu算法计算tou。
- 用sigmoid计算两张输入图像的差异(颜色差异),并根据公式(6)得到平滑项。
- 用显著性检测方法计算重叠区域的平均像素显著性,并根据公式(8)计算显著性权重。
- 根据公式(2)计算数据项。(根据代码顺序这一步应该在前面,不过先算谁都无所谓)
- 图割算法最小化能量还能输,然后梯度融合得到结果。
本文创新思路梳理:在整个图像拼接工作流中,创新图像融合步骤,即基于接缝线的融合方法,改进能量函数(因为能量函数的定义是影响效果最大的)。将最传统的图割算法需要的数据项和平滑项改进,其中平滑项由欧式距离损失改成sigmoid损失,并引入显著性目标检测,得到显著性权重。
直观地,就是将上面的初始能量函数公式变成下面的改进后的公式。

传统能量函数得到的结果:

树枝处放大:


基于感知的能量函数得到的结果:
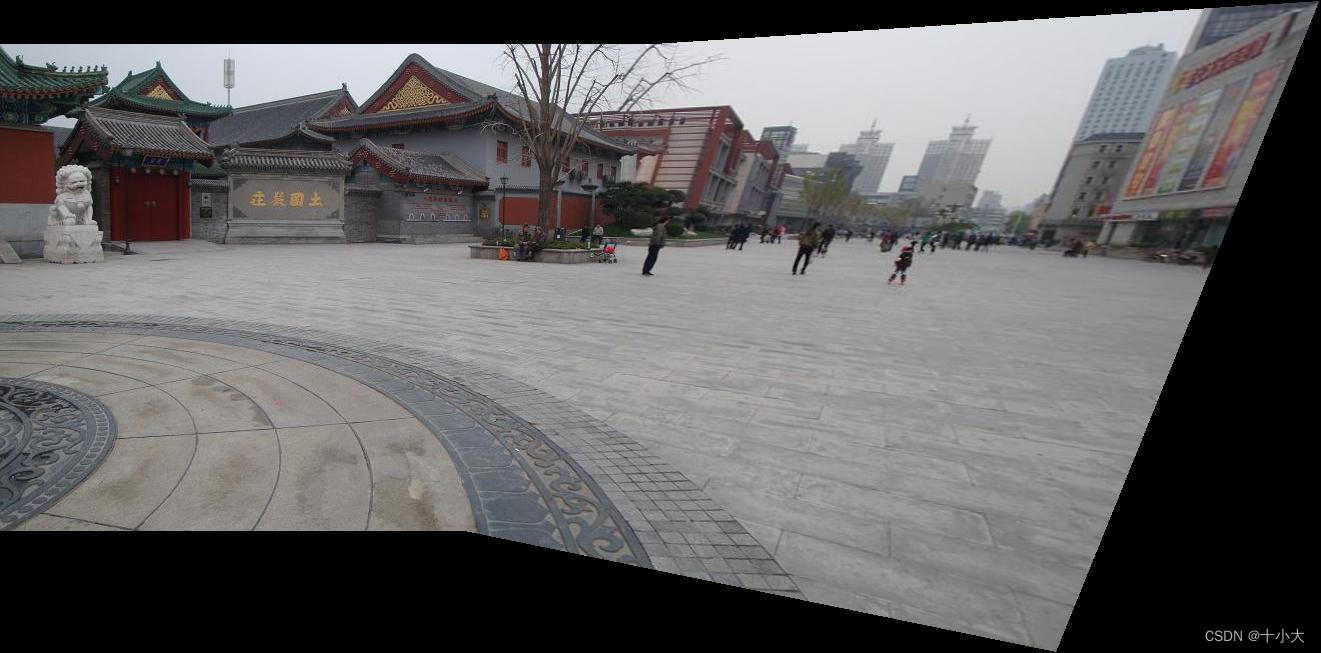

可以看到,初始的能量函数破坏了树枝处原有的结构,而基于感知的能量函数可以淡化这种结构破坏。
另一个有显著结构的例子:

|

|

|

|
左侧是没有感知的接缝融合结果,右侧是基于感知的接缝融合。很明显,基于感知的效果好,没有破坏线结构,对齐更准。
本文方法应该是目前基于接缝的融合方法中效果最好的了。因为它加入了感知,在重叠区域,接缝可以避免破坏一些显著结构,从而视觉效果很好。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Eprime打marker--Net Station软件
- 贷前风控流程与常见策略规则类型
- Python装饰器重载内置操作
- 网络编程基础(3):什么是sockaddr和sockaddr_in?区别是什么?两者该如何使用,如何相互转换呢?
- Linux———wc命令(狠狠爱住)
- 解决Edge浏览器问题的实用教程
- 【手写数据库】从零开始手写数据库内核,行列混合存储模型,学习大纲成型了
- 基于SSM的图书商城(有报告)。Javaee项目。ssm项目。
- 【Linux】用户和文件权限管理
- js数组扁平化的几种方式