Opencv实验合集——实验六:模板匹配
1.概念
模板匹配旨在在图像中找到与给定模板最相似的部分。其核心思想是通过滑动模板,计算每个位置与模板的相似性,然后找到最匹配的位置。这一过程常涉及选择匹配度量方法,如平方差匹配、归一化平方差匹配、相关性匹配等。模板匹配在目标检测、物体识别等领域有广泛应用,尽管对于光照、尺度、旋转等变化敏感,但仍然是图像处理中常用的技术之一。
2.有关的函数方法
cv.matchTemplate(img, template, method):这一行代码执行模板匹配操作。它采用三个参数:
img:表示待搜索的原始图像。
template:表示要在原始图像中搜索的模板图像。
method:表示匹配方法,即模板匹配算法的选择。这可以是以下之一:? ? ?
cv.TM_SQDIFF:平方差匹配法cv.TM_SQDIFF_NORMED:归一化平方差匹配法cv.TM_CCORR:相关性匹配法cv.TM_CCORR_NORMED:归一化相关性匹配法cv.TM_CCOEFF:系数匹配法cv.TM_CCOEFF_NORMED:归一化系数匹配法
cv.matchTemplate 返回一个二维数组(图像),表示匹配程度,该数组的大小是原始图像减去模板图像的大小加一。?
min_val, max_val, min_loc, max_loc = cv.minMaxLoc(res):这一行代码用于找到匹配结果中的最小值、最大值以及它们的位置。具体来说:
min_val:是匹配结果中的最小值。max_val:是匹配结果中的最大值。min_loc:是最小值的位置(x,y坐标)。max_loc:是最大值的位置(x,y坐标)。
3.匹配算法有关的原理:?
1.TM_CCOEFF (系数匹配法):
- 原理:计算模板与图像的协方差。
- 概念:协方差表示两个变量之间的关联程度,正值表示正相关,负值表示负相关。
- 适用:适用于模板和图像中存在明显对比度差异的情况。
协方差具体计算公式:
在实际操作中,可以使用矩阵运算来高效地计算协方差矩阵。如果 X 和 Y 分别是 m×n 和 m×p 的矩阵,这将产生一个 n×p 的协方差矩阵,
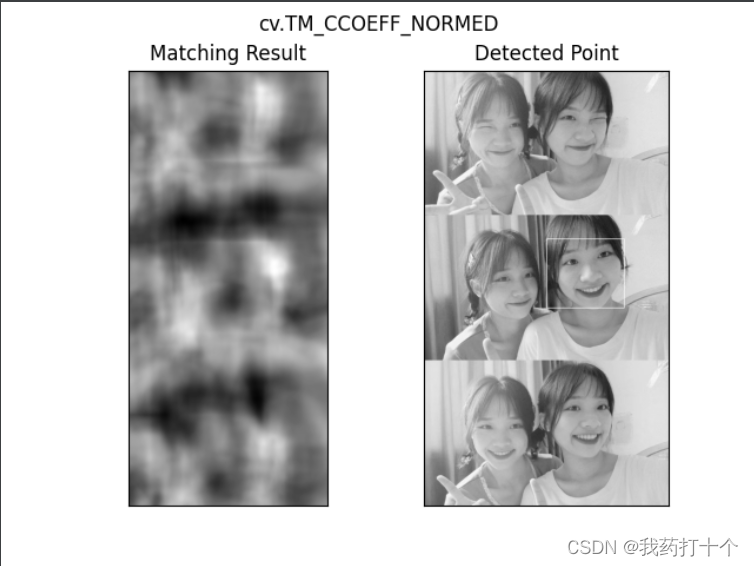
?2.TM_CCOEFF_NORMED (归一化系数匹配法):
- 原理:计算模板与图像的归一化协方差。
- 概念:通过标准化协方差,将匹配结果归一化到范围 [-1, 1]。
- 适用:适用于处理不同尺度和对比度的图像。
3.TM_CCORR (相关性匹配法):
- 原理:计算模板与图像的相关性。
- 概念:相关性表示两个信号之间的相似性程度,值越大表示匹配越好。
- 适用:适用于处理模板和图像灰度变化较小的情况。
R(x,y)=?
[I(x+i,y+j)?T(i,j)]
- I(x+i,y+j) 是图像在位置 (x+i,y+j) 的像素值;
- T(i,j) 是模板在位置 (i,j) 的像素值;
- M 和 N 分别是模板的高度和宽度
在上述公式中,通过将模板与图像的对应像素值相乘,然后将所有乘积相加,得到一个相关性值。这个值越大,表示在图像的该位置与模板更相似
4.TM_CCORR_NORMED (归一化相关性匹配法):
- 原理:计算模板与图像的归一化相关性。
- 概念:通过标准化相关性,将匹配结果归一化到范围 [0, 1]。
- 适用:适用于处理不同尺度和对比度的图像。
5.TM_SQDIFF (平方差匹配法):
- 原理:计算模板与图像的像素差的平方和。
- 概念:值越小表示匹配越好。
- 适用:适用于处理灰度变化较大的图像。
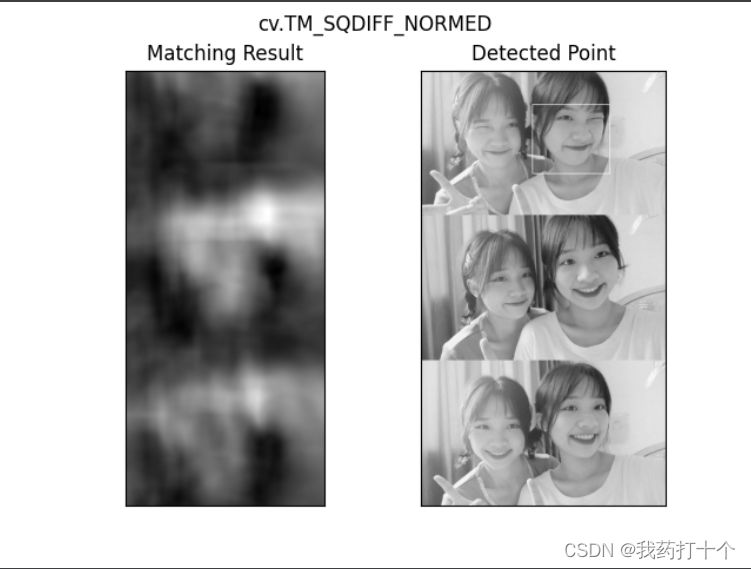
?6.TM_SQDIFF_NORMED (归一化平方差匹配法):
- 原理:计算模板与图像的归一化平方差。
- 概念:通过标准化平方差,将匹配结果归一化到范围 [0, 1]。
- 适用:适用于处理不同尺度和对比度的图像。
示例代码:
?
效果展示:
输入原图:


输出图:
 ?
?
 ?
?
 ?
?
 ?
?
 ?
?
本次实验主要展示了图像处理中的模板匹配功能,模板匹配功能主要还是通过对模板和图像的像素点的计算进行匹配,没有过多考虑到光照等其他方面的因素,可能比较适合灰度值图像,匹配出来的效果也因人而异,效果不是特别好,所以在此做个了解学习
如有错误或遗漏,希望小伙伴批评指正!!!!?
希望这篇博客对你有帮助!!!!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 进程与计划任务管理
- 【css技巧】css设置文字不能被选中
- 精彩回顾 I DatenLord Hackathon 2023圆满结束!
- python用pooch便捷地下载网络文件
- PyQt6 QFrame分割线控件
- 链路状态路由协议-OSPF
- window下载安装Mongodb数据库
- Python数据验证库之cerberus使用详解
- 腾讯云老用户怎样变成新用户享受“新用户专享”?
- 刘毅:Web3.0 到底是醒世恒言还是危言耸听?