【Matlab双目标定与立体匹配】
发布时间:2024年01月07日
介绍
本文给出了一组主动散斑双目的仿真数据,在此基础上,用Maltab实现了双目相机的标定与立体匹配。数据和代码见Github仓库:https://github.com/zxcn/matlab_stereo_vision
仿真数据
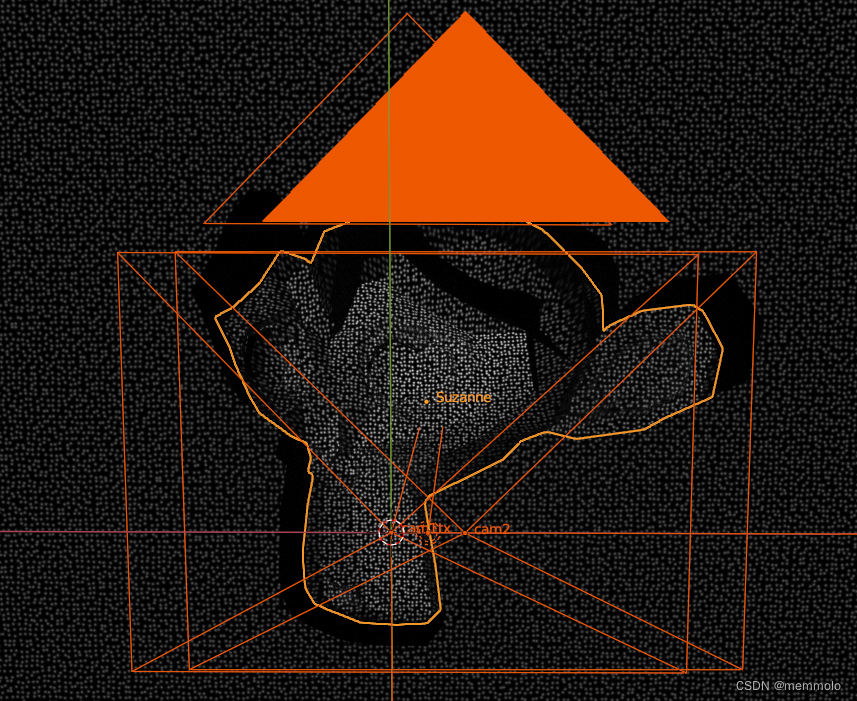
仿真数据由Blender生成,双目模组参数值如下表。
| 参数 | Width | Height | f x f_x fx? | f y f_y fy? | c x c_x cx? | c y c_y cy? | k 1 k_1 k1? | k 2 , k 3 p 1 , p 2 k_2,k_3\\p_1,p_2 k2?,k3?p1?,p2? | Rotation (Euler XYZ) | Translation(mm) |
|---|---|---|---|---|---|---|---|---|---|---|
| 左相机 | 1600 | 1200 | 718.66 | 718.66 | 799.5 | 599.5 | -0.01 | 0 | 0°,0°,0° | 0,0,0 |
| 右相机 | 1600 | 1200 | 718.66 | 718.66 | 799.5 | 599.5 | -0.01 | 0 | 0.5°,0.1°,-0.2° | 100,0.5,1 |
这里的主点位置是相对于图像左上角像素坐标为(0,0)的坐标。Matlab图像左上角像素坐标为(1,1),标定结果中主点坐标需减1才能和此处的真值对应。
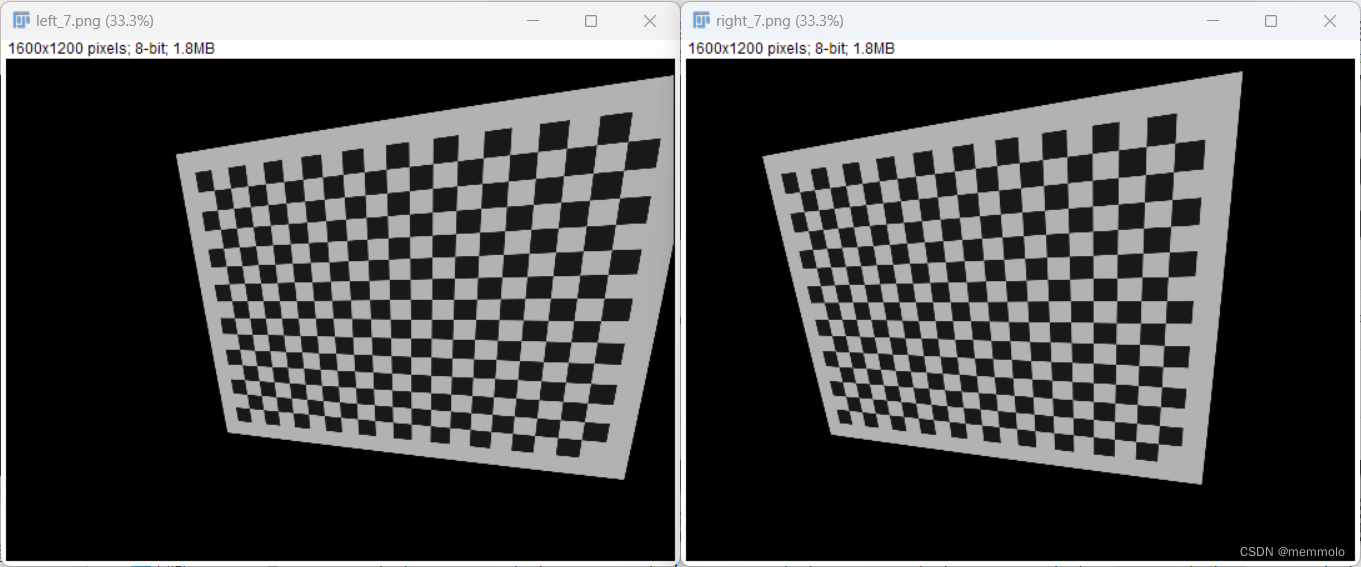
下图是标定板仿真结果示例,共有九组位姿。
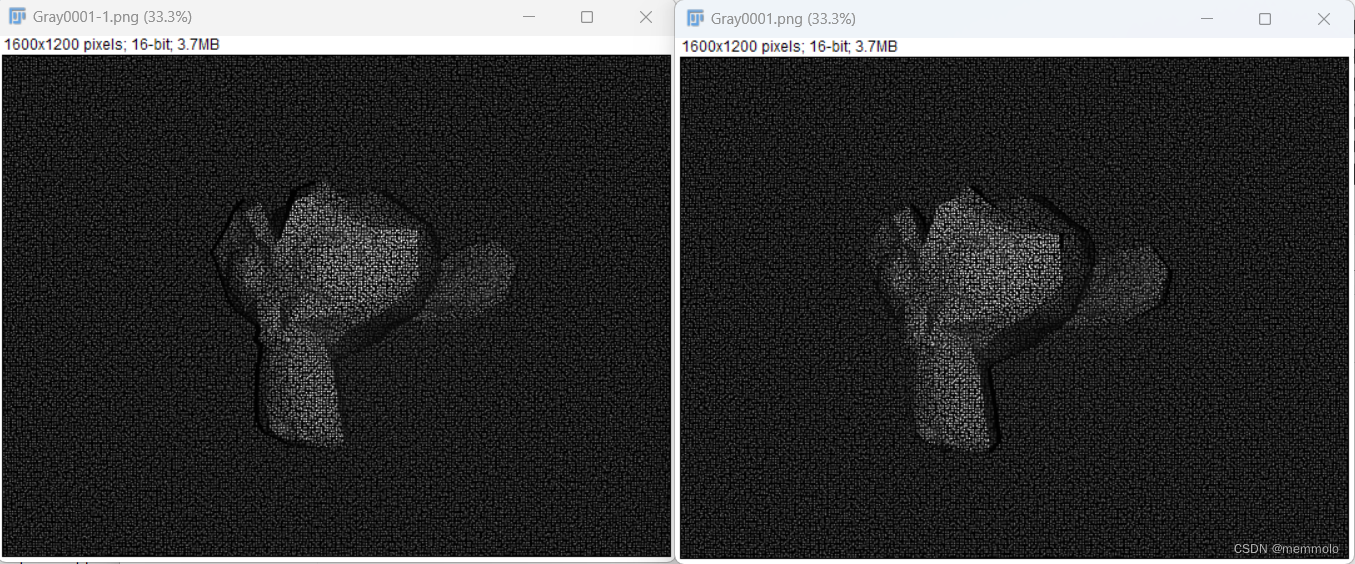
下图是散斑图像仿真结果示例。
双目标定
clear
clc
close all
% 图像后缀
image_suffix = '.png';
% 图像路径
left_image_path = './Data/Left';
right_image_path = './Data/Right';
% 查找路径下所有指定格式的图像
left_image_list = dir([left_image_path,'/*',image_suffix]);
right_image_list = dir([right_image_path,'/*',image_suffix]);
% 结构体转换为元胞数组
imageFileNames1 = cellfun(@(c1,c2)[c1,'/',c2],{left_image_list.folder},{left_image_list.name},'UniformOutput',false);
imageFileNames2 = cellfun(@(c1,c2)[c1,'/',c2],{right_image_list.folder},{right_image_list.name},'UniformOutput',false);
% 棋盘格检测
detector = vision.calibration.stereo.CheckerboardDetector();
[imagePoints, imagesUsed] = detectPatternPoints(detector, imageFileNames1, imageFileNames2);
% 棋盘格角点的世界坐标
% Generate world coordinates for the planar patten keypoints
squareSize = 20; % 单位mm
worldPoints = generateWorldPoints(detector, 'SquareSize', squareSize);
% 读取左相机的第一个图像,获得图像长宽
I1 = imread(imageFileNames1{1});
[mrows, ncols, ~] = size(I1);
% estimateCameraParameters:相机标定函数
% EstimateSkew:是否计算Skew参数
% EstimateTangentialDistortion:是否计算切向畸变参数p1,p2
% NumRadialDistortionCoefficients:径向畸变参数数量,为2则仅使用k1,k2,为3则使用k1,k2,k3
% WorldUnits:尺度单位
% InitialIntrinsicMatrix:内参矩阵初始值
% InitialRadialDistortion:径向畸变初始值
% ImageSize:图像长宽
[stereoParams, pairsUsed, estimationErrors] = estimateCameraParameters(imagePoints, worldPoints, ...
'EstimateSkew', false, 'EstimateTangentialDistortion', true, ...
'NumRadialDistortionCoefficients', 3, 'WorldUnits', 'millimeters', ...
'InitialIntrinsicMatrix', [], 'InitialRadialDistortion', [], ...
'ImageSize', [mrows, ncols]);
% 显示重投影误差
% View reprojection errors
h1=figure; showReprojectionErrors(stereoParams);
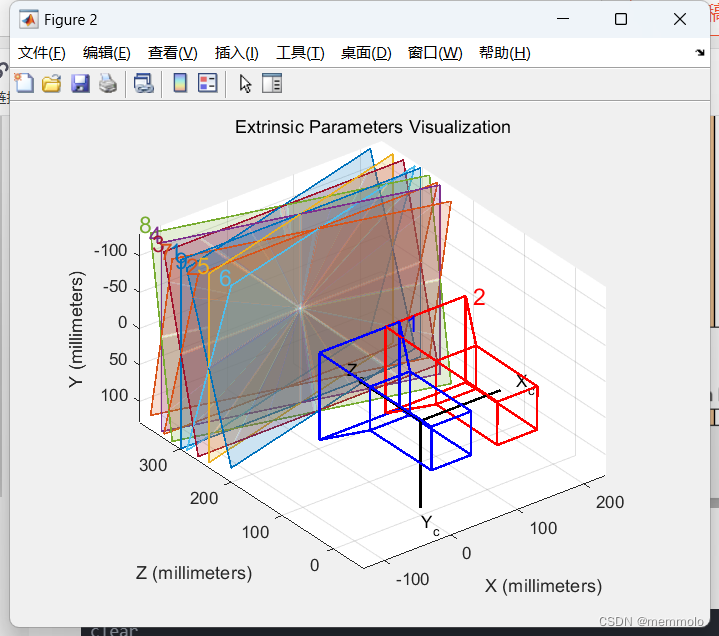
%可视化标定板和相机位姿
% Visualize pattern locations
h2=figure; showExtrinsics(stereoParams, 'CameraCentric');
% 显示相机标定结果和误差
% Display parameter estimation errors
displayErrors(estimationErrors, stereoParams);
% 保存标定结果
save stereoParams stereoParams
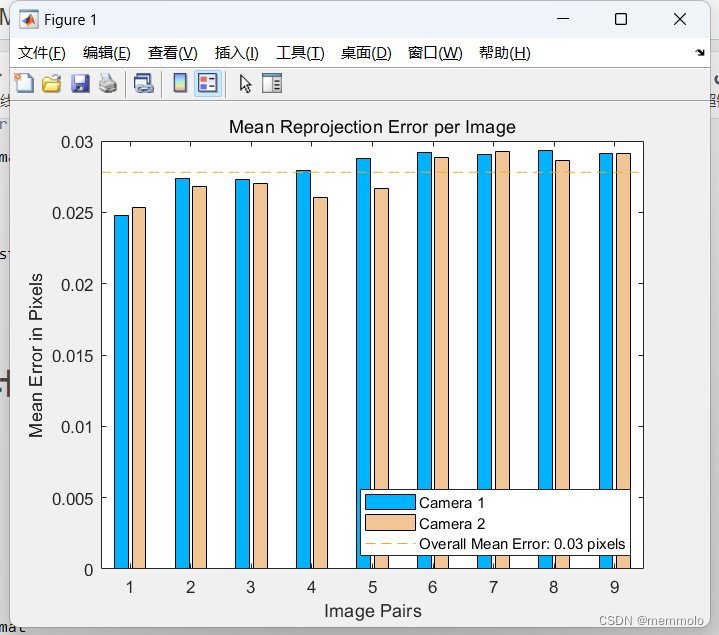
标定结果如下,与仿真参数十分接近。
Standard Errors of Estimated Stereo Camera Parameters
-----------------------------------------------------
Camera 1 Intrinsics
-------------------
Focal length (pixels): [ 718.6581 +/- 0.0170 718.6589 +/- 0.0170 ]
Principal point (pixels):[ 800.4972 +/- 0.0135 600.5021 +/- 0.0104 ]
Radial distortion: [ -0.0100 +/- 0.0000 -0.0001 +/- 0.0001 0.0001 +/- 0.0000 ]
Tangential distortion: [ 0.0000 +/- 0.0000 -0.0000 +/- 0.0000 ]
Camera 1 Extrinsics
-------------------
Rotation vectors:
[ -0.0000 +/- 0.0000 0.0000 +/- 0.0000 -0.0000 +/- 0.0000 ]
[ 0.2618 +/- 0.0000 0.0000 +/- 0.0000 -0.0000 +/- 0.0000 ]
[ -0.2618 +/- 0.0000 0.0000 +/- 0.0000 0.0000 +/- 0.0000 ]
[ 0.0000 +/- 0.0000 0.2618 +/- 0.0000 0.0000 +/- 0.0000 ]
[ -0.0000 +/- 0.0000 -0.2618 +/- 0.0000 0.0000 +/- 0.0000 ]
[ 0.2603 +/- 0.0000 -0.2603 +/- 0.0000 0.0343 +/- 0.0000 ]
[ 0.2603 +/- 0.0000 0.2603 +/- 0.0000 -0.0343 +/- 0.0000 ]
[ -0.2603 +/- 0.0000 0.2603 +/- 0.0000 0.0343 +/- 0.0000 ]
[ -0.2603 +/- 0.0000 -0.2603 +/- 0.0000 -0.0343 +/- 0.0000 ]
Translation vectors (millimeters):
[ -129.9996 +/- 0.0058 -130.0004 +/- 0.0044 300.0032 +/- 0.0076 ]
[ -129.9999 +/- 0.0053 -125.5723 +/- 0.0041 266.3559 +/- 0.0071 ]
[ -129.9984 +/- 0.0063 -125.5708 +/- 0.0047 333.6443 +/- 0.0079 ]
[ -123.8652 +/- 0.0065 -130.0015 +/- 0.0049 346.5868 +/- 0.0080 ]
[ -123.8676 +/- 0.0052 -130.0014 +/- 0.0039 253.4183 +/- 0.0069 ]
[ -115.1569 +/- 0.0047 -125.5707 +/- 0.0036 220.9121 +/- 0.0064 ]
[ -132.5749 +/- 0.0060 -125.5702 +/- 0.0046 314.0887 +/- 0.0074 ]
[ -115.1568 +/- 0.0070 -125.5710 +/- 0.0052 379.0872 +/- 0.0082 ]
[ -132.5746 +/- 0.0056 -125.5699 +/- 0.0042 285.9146 +/- 0.0072 ]
Camera 2 Intrinsics
-------------------
Focal length (pixels): [ 718.6726 +/- 0.0170 718.6702 +/- 0.0170 ]
Principal point (pixels):[ 800.5148 +/- 0.0134 600.5037 +/- 0.0103 ]
Radial distortion: [ -0.0100 +/- 0.0000 -0.0001 +/- 0.0001 0.0000 +/- 0.0000 ]
Tangential distortion: [ 0.0000 +/- 0.0000 0.0000 +/- 0.0000 ]
Position And Orientation of Camera 2 Relative to Camera 1
---------------------------------------------------------
Rotation of camera 2: [ -0.0087 +/- 0.0000 -0.0017 +/- 0.0000 0.0035 +/- 0.0000 ]
Translation of camera 2 (millimeters):[ -99.9977 +/- 0.0030 -0.8583 +/- 0.0028 -1.1606 +/- 0.0061 ]
视差、点云计算
clear
clc
close all
% 加载标定参数
load stereoParams.mat
% 待计算图像路径
left_image_path = './Data/Scene/Left/Gray0001.png';
right_image_path = './Data/Scene/Right/Gray0001.png';
% 读取图片
I1 = double(imread(left_image_path));
I2 = double(imread(right_image_path));
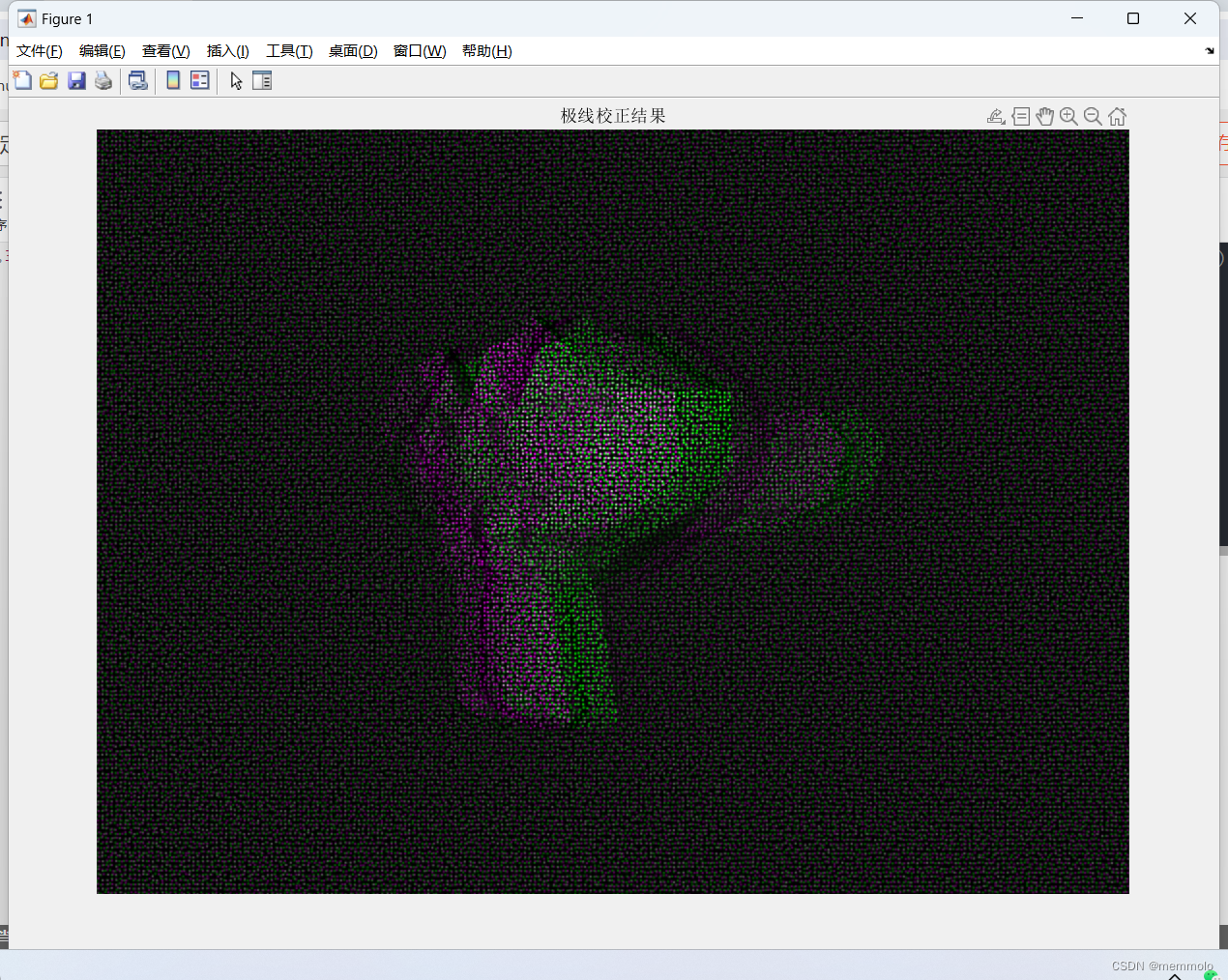
% 极线校正
[J1, J2, reprojectionMatrix] = rectifyStereoImages(I1,I2,stereoParams,'OutputView','valid','FillValues',0);
J1 = mat2gray(J1,[0,1023]);
J2 = mat2gray(J2,[0,1023]);
figure,imshowpair(J1,J2),title('极线校正结果')
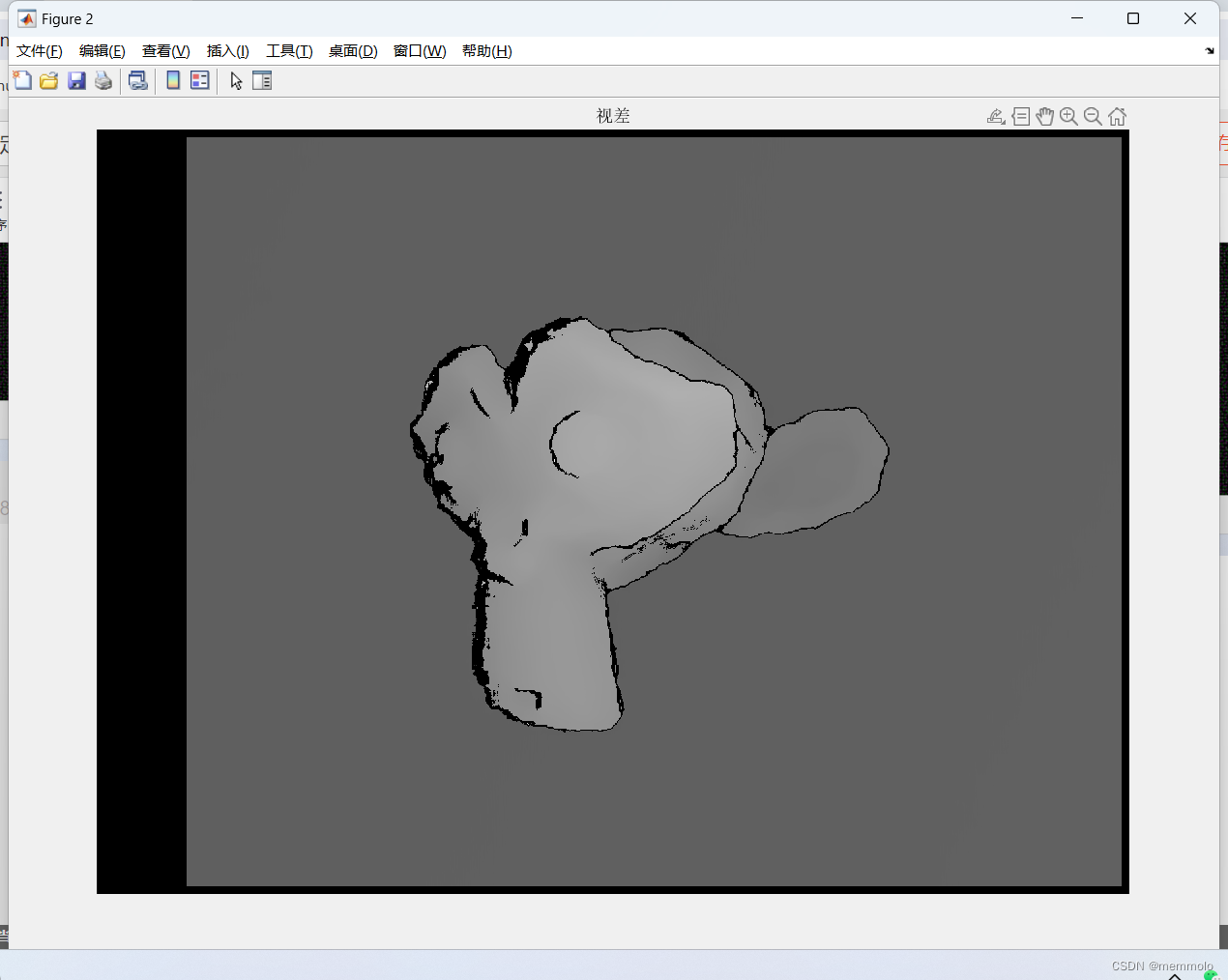
% disparityBM:BlockMatch计算视差
% DisparityRange:视差范围
% BlockSize:匹配块的大小
disparityMap = disparityBM(J1,J2,"DisparityRange",[0,128],"BlockSize",25);
figure,imshow(disparityMap,[0,128]),title('视差')
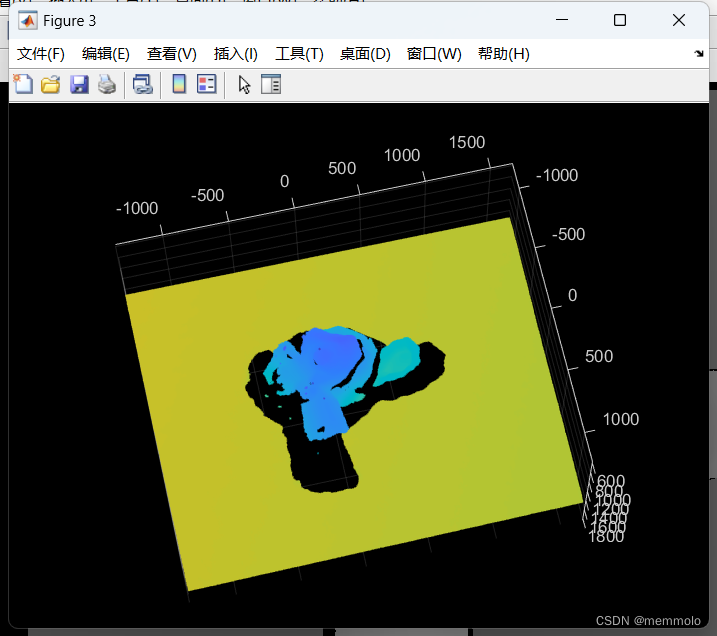
% 重建三维点云
xyzPoints = reconstructScene(disparityMap,reprojectionMatrix);
% 点云维度由HxWx3转换为(HxW)x3
xyzPoints = reshape(xyzPoints,[],3);
% 滤除z值大于2000的点
m = xyzPoints(:,3)<2000;
ind = find(m==1);
xyzPoints = xyzPoints(m,:);
% 显示点云
figure,pcshow(xyzPoints);
文章来源:https://blog.csdn.net/memmolo/article/details/135428582
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Python输入输出流学习笔记
- spring boot 3.2 使用restClient忽略ssl
- PerfDog:性能测试工具的利器
- Java学习路线第六篇:互联网生态(1)
- 【vue filters 过滤器】vue页面 全局使用
- redis夯实之路-哨兵(Sentinel)机制详解
- 简约大气时尚宣传视频模板剪辑素材PR项目工程文件
- 从零开始配置pwn环境:优化pwndocker配置
- C语言数据结构-----二叉树(2)堆的深入理解及应用、链式二叉树的讲解及代码实现
- 通过CanvasRenderer.SetColor和Image.color修改UI组件颜色的区别