自动化革命:大象机器人的Mercury A1机械臂
引言
大象机器人的Mercury系列,是面向工业自动化和智能制造的新型机械臂产品线。这些机械臂不仅在设计上创新,还在材料选择上使用了碳纤维、铝合金和工程塑料等轻质强韧材料,搭载高精度谐波减速器。Mercury系列的推出,反映了大象机器人对机器人技术未来趋势的洞察,旨在满足工业、教育和研究等多种场景的需求。这些机械臂不仅展现了卓越的性能,还标志着大象机器人在全球机器人技术领域的一大步进。
在这篇文章中,我们将深入探讨Mercury?A1的独特设计、先进功能,以及它如何在各行各业中发挥重要作用,引领着未来技术的潮流。
https://www.youtube.com/watch?v=Ru24sDmK8yI&t=7s
Mercury?A1
设计与结构
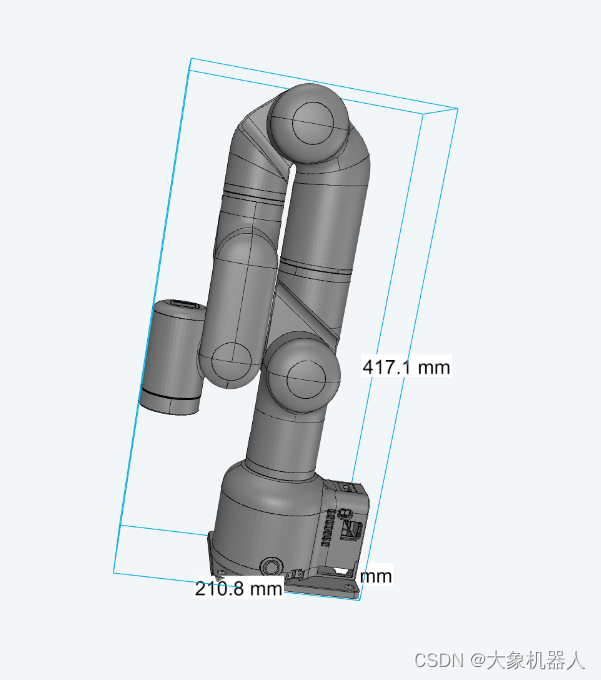
Mercury?A1机械臂经过精心设计,其物理属性充分体现了现代工业美学和高科技的完美结合。这款机械臂的尺寸为98x128x640毫米,展现了紧凑而高效的设计理念。在材料的选择上,Mercury?A1采用了轻质的碳纤维、坚固耐用的铝合金和高性能工程塑料。这种材料组合不仅确保了机械臂的坚固和耐用性,还大大减轻了整体重量,使其在操作和移动中更加灵活便捷。
这款机械臂是大象机器人对工业自动化领域的深刻理解和技术创新能力的完美展现。


技术规格
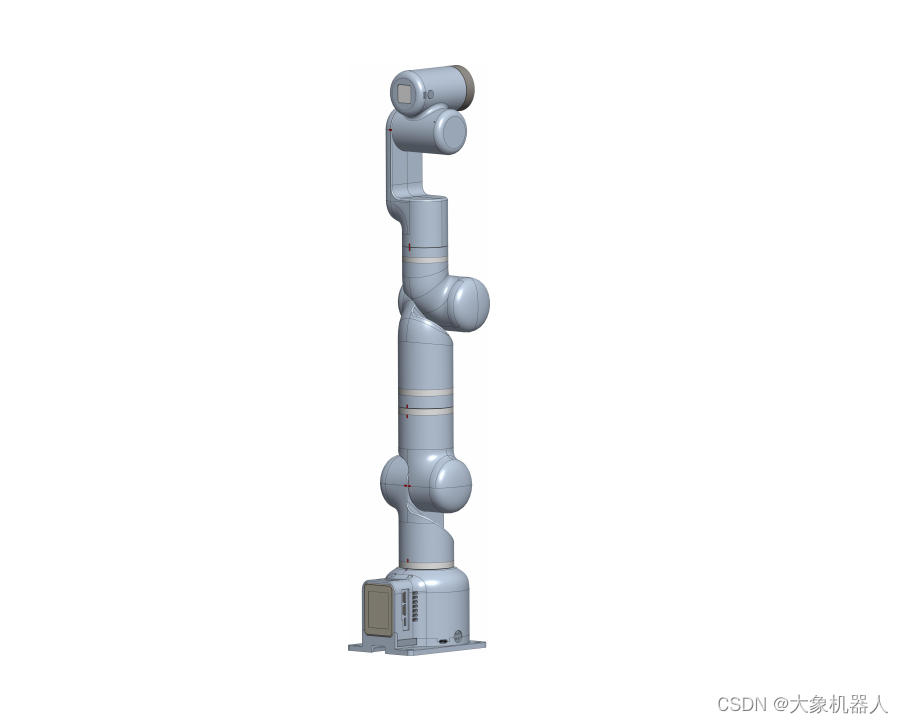
Mercury?A1拥有七个自由度(7DOF),这使它能够在狭小或复杂的空间内灵活运动。机械臂的最大工作半径为450毫米,配备了高精度谐波减速器,确保了精确的动作控制和稳定的操作性能。此外,Mercury?A1的最大负载能力为1kg,重复定位精度高达±0.05mm,这些特点使其非常适合于需要高精度操作的应用场景。

myPanel?系统
Mercury?A1?配备了内置‘myPanel’操作系统,这是专门为Mercury?A1研发的一个系统。他通过2英寸的触摸屏与机械臂相连接,允许用户迅速进行教学、编程、部署和调试,而无需任何额外的硬件设备。这种一体化的控制方式大大简化了操作过程,使得Mercury?A1更加用户友好,易于快速应用于不同场景,无需编程就可以使用拖动施教,快速移动机械臂,检查电机状况等功能。
拖动施教:
通过物理接触(拽动机械臂)直接引导机械臂进行运动,让机械臂按照期望的运动轨迹进行复现。
快速移动:
可以在不变成的情况下,对机械臂进行关节控制和坐标控制。
多样生态系统
操作系统和主板
Mercury?A1?内置的操作系统是基于Ubuntu?20.04?MATE版本,这是一个主流的开源Linux发行版,为机械臂提供了稳定且丰富的功能。此外,它的主控板采用了广受欢迎的树莓派,树莓派的社区是全球较大的硬件开发的社区,里边有许多有意思的开源项目,丰富的资源提供。

软件兼容性和开源代码
Mercury?A1支持多种主流编程语言和软件平台,与ROS、Moveit、Gazebo和Mujoco等仿真软件兼容。
Elephant?Robotics?自主研发的pymycobot?开源库,开放了众多API方便用户可以快捷获取机械臂的力矩,电机的扭矩,关节控制,坐标控制等功能。
GitHub - elephantrobotics/pymycobot: This is a python API for ElephantRobotics product.

仿真软件可以用来模拟机械臂的运动和行为,从而帮助机器人工程师开发和优化机器人控制算法。即使在不进行过实际操作机械臂的情况下,在计算机上编写和测试机器人程序,这样可以节省时间和成本,并避免在实际操作中出现的错误导致机器的损坏。
仿真的环境也被大量用于教育和研究方面,老师和学生可以在使用仿真软件,来学习机械臂的运动学,动力学和控制原理等。
MoveIt!、Mujoco?和?Gazebo?是三种常用的机械臂仿真软件,MoveIt和Gazebo是集成在ROS(全球最大的机器人开源操作系统)当中,moveit是一个开源的机器人运动规划框架,他提供了各种运动算法和工具,Gazebo是开源机器人的仿真器,他提供了逼真的物理模拟环境和丰富的传感器模型。Mujoco是一款商业的物理引擎和模拟器,它因物理准确性和高性能所出名,也是可以用来模拟各种各样的物理系统和机械臂等环境。
硬件配备
在Mercury?A1的配件方面,配备了一系列高效能的末端执行器和感知设备,以满足各种复杂应用场景的需求,下面将为你简要介绍一下具体的功能。
- 柔性夹爪:这种夹爪设计精巧,能够轻柔地抓取物体,非常适合处理如鸡蛋、水果等柔软或易损的物品。
- 平行夹爪:专为处理精密细小物件而设计,如螺丝、细针等。这种夹爪在高精度要求的场景中发挥着关键作用。
- 自适应夹爪:这种夹爪能够根据被抓取物体的宽度自动调整夹取范围,确保在抓取过程中不会对物体造成损伤。它的智能设计使Mercury?A1能够灵活应对各种不同大小和形状的物体。
- 2D摄像头:作为Mercury?A1的“眼睛”,这种摄像头能够感知周围环境,提供重要的视觉信息,使机械臂能够更加精准地执行任务。
- 3D摄像头:提供三维空间数据,让Mercury?A1能够更精确地定位和处理物体。这种摄像头在复杂环境中尤其有用,如在需要精确空间定位和深度感知的场景。
- 吸泵:利用大气压强原理来吸取物体。这种吸泵的设计使Mercury?A1能够轻松地处理那些不适合用夹爪抓取的物体,如不规则形状或易碎物品。
有了这些多功能配件,Mercury?A1不仅能够适应多样化的操作需求,还能够在各种复杂环境中提供精准、可靠的操作性能,极大地扩展了Mercury?A1机械臂的应用范围,使其成为多领域解决方案的理想选择。
教育实例
在这个实例中,Mercury?A1机械臂通过其3D摄像头来执行视觉识别任务,这是机器人技术教育中的一个常见应用。利用3D摄像头,机械臂能够对场景中的木块及其附带的二维码进行准确识别。一旦识别成功,机械臂便根据编程指令准确地移动到木块的位置,使用吸泵进行抓取。
这种应用不仅演示了机械臂在视觉处理和物体操作方面的能力,而且还突出了它在教育领域的实用性,尤其是在机器视觉和自动化学习中。学生和研究人员可以通过这类实例学习如何整合硬件(如3D摄像头和机械臂)与软件(如图像处理算法和控制逻辑),以解决实际问题。
总结
我们可以看到Mercury?A1机械臂的七轴设计体现了其高度的灵活性和复杂操作的能力,这是高度自动化和精密操作领域的一个重大突破。Mercury?A1的创新之处不仅在于其硬件设计,还在于它所融合的软件技术。通过与先进的视觉系统相结合,例如利用3D摄像头进行物体识别和空间定位,Mercury?A1能够执行一系列从简单到复杂的任务,这与'Aloha'机器人的多功能性是一致的。
在未来,我们可以预见Mercury?A1和类似的多自由度机械臂将在更多领域发挥作用,如进行复杂的组装工作、执行精密的外科手术,甚至在艺术表演中创造独特的体验。
如果你有什么关于Mercury?A1想要了解的,欢迎在下方留言。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【C】volatile 关键字
- hb_zhyu编程的一路
- Packer-Fuzzer软件安装初始python相关库的问题:No module named ‘node_vm2‘&&cannot import name ‘OxmlElement‘ from ‘d
- KVM虚拟机console使用
- Pytest 结合 Allure 生成测试报告
- ThreadLocal用法以及使用场景
- 配置git服务器
- RDD入门——RDD 代码
- 【Java 进阶篇】JSP 内置对象详解
- 雕像(0008)