学位论文中常用的参考文献格式
撰写学位论文中,要确保文献列表中列出的参考文献格式正确,为此这篇文章给出常用的参考文献格式。
目录
目录
一、学位论文中常用的文献类型:
1.1学位论文中常用的文献类型:
- 专著(如图书)
- 专著中的析出文献 (如会议论文集中的某篇文章)
- 连续出版物中析出的文献(即期刊中析出的文献,也是我们通常引用的论文)
1.2作者名字的书写格式:
外文名:姓在前,名在后。名用缩写字母,且字母后省略点.,姓氏首字母大写,或全部大写。
例如:J. C. Smith--->Smith J C 或 SMITH J C;Albert Einstein --->Einstein A 或 EINSTEIN A
注:按照GB/T7714-2015的格式要求,英文作者名的字母全部大写.
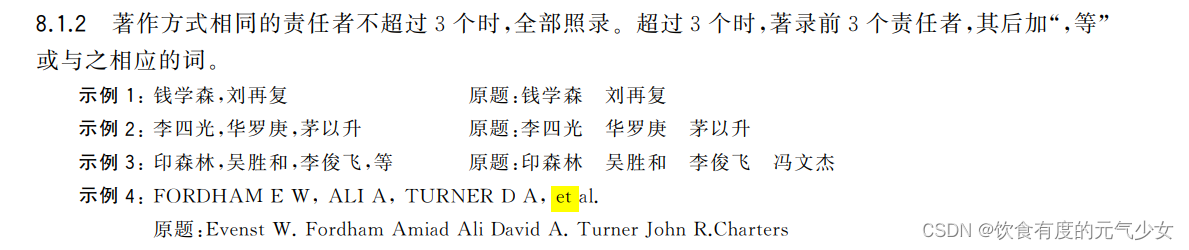
此外,只列出三个作者的名字. 如果文献责任作者超过三个人,在第四个作者名字处使用 ", et al”或者", 等"?。根据英文参考文献和中文参考文献划分.
此外, 姓氏与“etal.”“等”之间留适当空隙。
1.3特殊符号//
”//“ 用于专著中的析出文献(如会议集论文)的出处项前。
1.4格式中的英文标点符号后面都加空格,除了最后一个“.”
“.” 、","、":"等英文标点符后面都加空格,除了文献格式的最后一个标点"."外,其他都是半角输入.
1.5关于arxiv这些论文预印本网站公布的论文的引用
arxiv这些论文预印本网站公布的论文即不是期刊论文也不是会议论文,可以按电子文献中的联机网络数据库的格式著录,例如:Kim D, Carlo J D, Katz B, et al. Highly dynamic quadruped locomotion via whole-body impulse control and model predictive control[DB/OL]. (2019-09-14) [2022-05-25].?https://arxiv.org/abs/2110.02799.
二、专著
2.1格式:
作者. 书名[M]. 出版地: 出版者, 出版年.
这里标识M表示普通图书(monograph ).
2.2例子:
[1] 郑浩峻, 张秀丽. 足式机器人生物控制方法与应用[M]. 北京: 清华大学出版社, 2011.
[2] 周美立. 相似性科学[M]. 北京: 科学出版社, 2004.
[3] 汪应洛. 系统工程[M]. 第3版. 北京: 机械工业出版社, 2003: 471-472.
[4] Yu H B, Liu J G, Liu L Q, et al.?Intelligent robotics and applications[M]. Berlin, Germany: Springer, 2019.
关于版本:
第1版不著录,其他版本说明应著录。
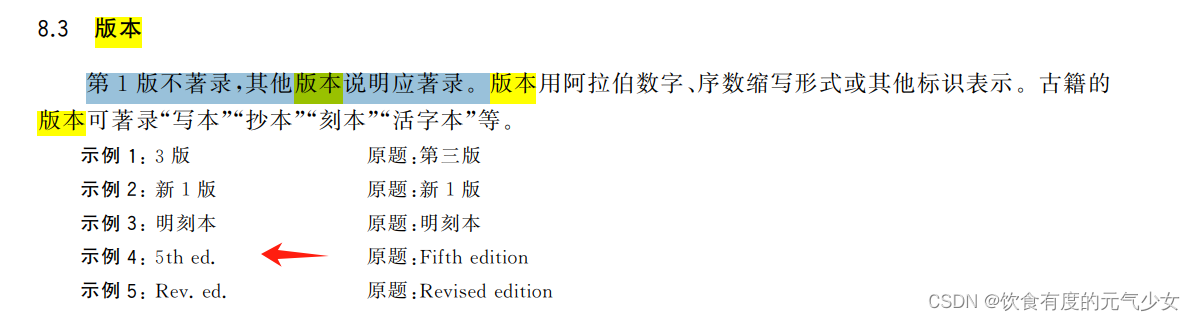
格式:

例子:
 ?
?
三、专著中析出的文献(会议集论文)
3.1格式:
析出文献主要责任者. 题名[C]//会议论文集名. 出版地: 出版者, 出版年: 起止页码.
这里标识C表示会议文集(conference works).
3.2例子:
[1] 钟文发. 非线性规划在可燃毒物配置的应用[C]. 西安: 西安电子科技大学出版社, 1996: 468-471.
[2] 马克思. 政经济批判[M]//马克思, 恩格斯. 马克思恩格斯全集: 第35卷. 北京人民版社, 2013: 302.
[3] 贾东琴, 柯平. 面向数字素养的高校图书馆数字服务体系研究[C]//中国图书馆学会. 中国图书馆学会年会论文集: 2011年卷. 北京: 国家图书馆出版社, 2011: 45-52.
[4] Noot N V D, Ijspeert A J, Ronsse R. Biped Gait Controller for Large Speed Variations, Combining Reflexes and a Central Pattern Generator in a Neuromuscular Model[C]//IEEE International Conference on Robotics and Automation (ICRA). Seattle, WA, USA: IEEE, 2015: 6267–6274.
[5] Matos V, Santos C P. Omnidirectional Locomotion in a Quadruped Robot: a CPG-based Approach[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Taipei, China: IEEE, 2010: 3392–3397.
四、连续出版物中析出的文献(期刊论文等)
4.1格式:
析出文献主要责任者. 题名[J]. 期刊名, 年, 卷(期): 起止页码.
这里标识J表示期刊(journal).
4.2例子:
[1] 何龄修. 读南明史[J]. 中国史研究, 1998, 6(3): 167-173.
[2] 余联庆, 枚元元, 李琳, 等. 闭链弓形五连杆越障能力分析与运动规划[J]. 机械工程学报, 2017, 53(7): 69-75.
[3] KANAMORI H. Shaking without quaking[J]. Science, 1998, 279(5359): 2063.
[4] Ijspeert A J, Crespi A, Ryczko D, et al. From Swimming to Walking with Asalamander Robot Driven by a Spinal Cord Model[J]. Science, 2007, 315(5817): 1416–1420.
[5] Lee J, Hwangbo J, Wellhausen L, et al. Learning quadrupedal locomotion over challenging terrain[J]. Science Robotics, 2020, 5(47): eabc5986.
参考:
Chinese-Linguistics_Citation-Styles.pdf(写的很详细,介绍了文献类型标识以及不同类型的参考文献示例,简单直观且明了)
参考文献著录格式(国标GB/T7714-2015) - 知乎 (zhihu.com)
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 工程监测仪器振弦采集仪的应用及技术研究
- 2024最新版Node.js安装使用指南
- IDEA设置新建类注释、手动注释详解
- antdv中的slider组件会默认将min值传递给value
- 【微机原理与接口技术】知识点总结(1)
- 企业数据可视化-亿发数据化管理平台提供商,实现一站式数字化运营
- 好用的便签有哪些?windows便签工具在哪打开?
- 【Linux】进程信号——进程信号的概念和介绍、产生信号、四种产生信号方式、阻塞信号、捕捉信号、阻塞和捕捉信号的函数
- 如何解决分支机构无法连入总部采购管理系统的难题
- 动态顺序表