xtdrone用键盘控制无人机飞行 无法起飞
发布时间:2024年01月12日
运行案例 解锁无人机螺旋桨转动但无法起飞 也未报错
解决方法:
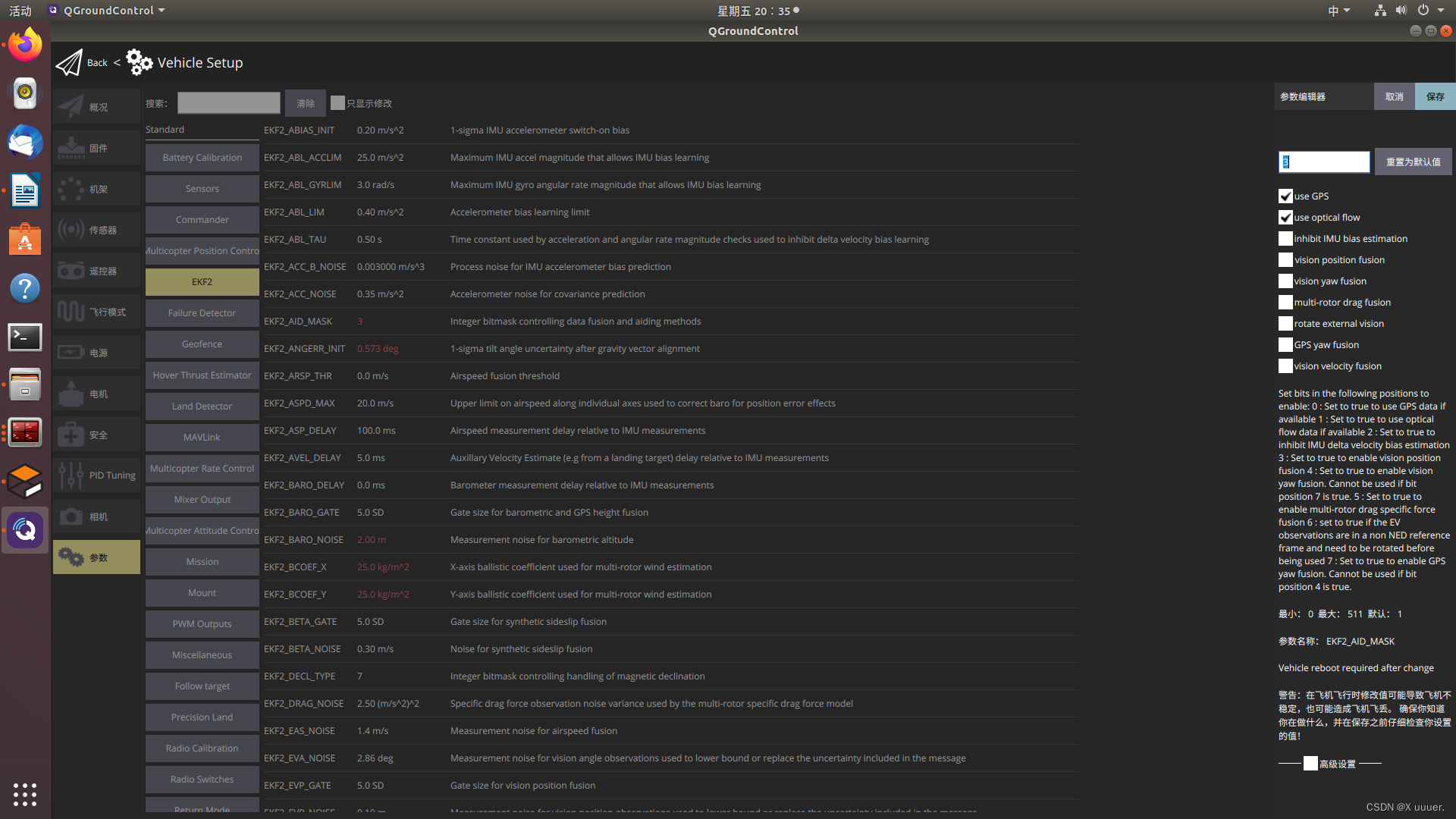
在QGC中修改:PX4飞控EKF配置
将PX4使用的EKF配置为融合GPS的水平位置与气压计高度。
如果我们想使用视觉定位,就需要把修改配置文件。
?此修改意味着EKF融合来自mavros/vision_pose/pose的数据,并不是修改完无人机就可以视觉定位了,需要相关程序提供mavros/vision_pose/pose的数据,相关程序包括视觉SLAM、激光SLAM和获取Gazebo真值等。
如果没有额外的视觉数据,想要飞行必须改回基于GPS和气压计的定位。
一般情况下,自主飞行的无人机需要有位姿数据,查看/xxx_xx/mavros/local_position/pose应该有正确的数据。
步骤:
先运行launch文件
cd ~/PX4_Firmware
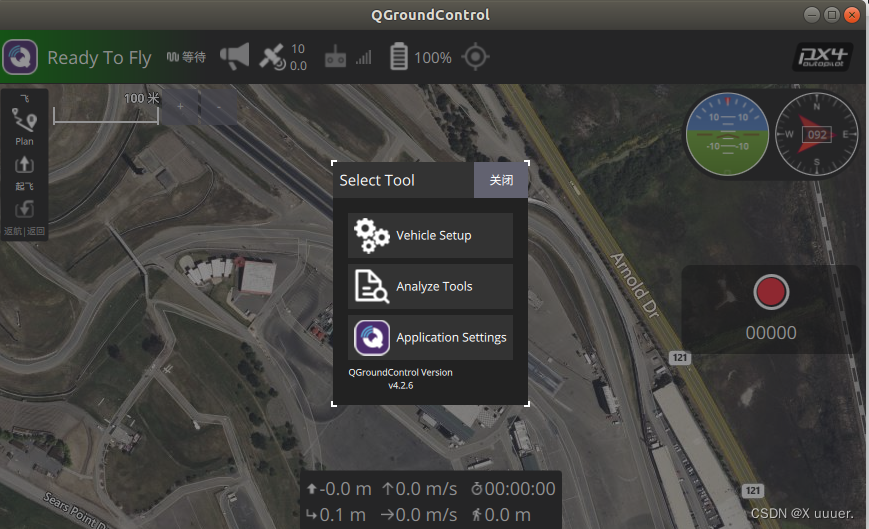
roslaunch px4 outdoor3.launch ?然后打开QGC软件:
1

2
3
文章来源:https://blog.csdn.net/weixin_45868890/article/details/135561367
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- luceda ipkiss教程 57:画微环调制器
- 跨域怎么解决
- What is `@RequestBody ` does?
- 米贸搜|Facebook5分钟正确了解Meta竞价策略,让广告系列超越竞争对手!
- 基于Hadoop的网上购物行为大数据分析及预测系统【flask+echarts+机器学习】前后端交互
- 【后端技术】术有千法,道本归一
- Leetcode刷题笔记题解(C++):328. 奇偶链表
- 「Verilog学习笔记」时钟切换
- 2023年世界网络战装备的发展
- CentOS 安装python