Linux多线程——线程控制
本章Gitee仓库:线程控制
0. 前言
由于Linux内核当中,没有很明确的线程概念,它只有轻量级进程的概念。
所以这就注定了Linux操作系统,不会给我们直接提供线程的系统调用,指挥提供轻量级进程的系统调用。
而我们用户需要线程的接口,所以在用户和系统之间,Linux程序员给我们在应用层开发出了一个pthread线程库(第三方库),将轻量级线程的相关接口进行封装,为用户提供直接线程的接口。所有在Linux中编写多线程的代码时,需要使用这个第三方pthread库
虽然这是第三方库,但是几乎所有的Linux平台都是默认自带这个库的
1. 线程创建
#include <pthread.h>
int pthread_create(pthread_t *thread, const pthread_attr_t *attr,void *(*start_routine)(void *), void *arg);
-
pthread_t *thread:输出型参数,返回创建的线程id -
const pthread_attr_t *attr:创建线程的属性,大部分情况不用管,设置为nullptr -
void *(*start_routine)(void *):函数指针,返回值为void*,参数也为void*,传入一个函数进来,让线程执行该指针指向的函数处void*可以接收或者返回任意类型 -
void *arg:输入型参数,创建线程成功,新线程回调函数的时候,需要参数,这个参数就是给线程函数传递的不仅可以传递参数,还可以传递对象
-
线程创建成功返回
0,创建失败返回错误码。
指针大小根据平台,32位的为4字节,64位的位8字节

由于我们用的线程库是第三方库,所以在编译的时候,要带上
-lpthread
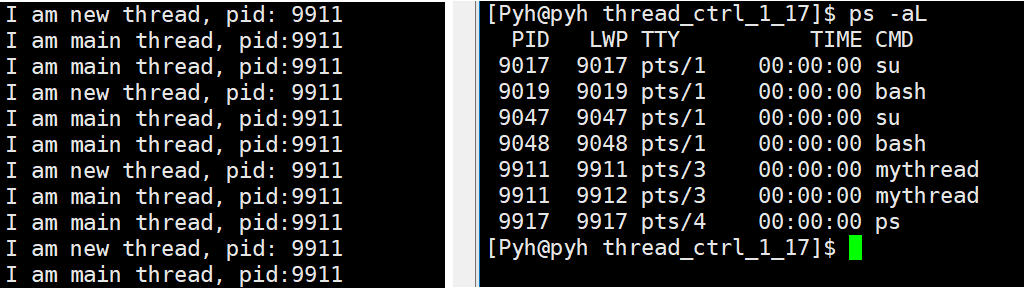
ps axj是查看进程的,如果需要查看线程ps -aL:
LWP:light weight process就是轻量级进程,这就是我们线程的tid不管是哪个线程因为异常被干掉了,其他线程(包括主线程)都会一同被干掉
void *threadRoutine(void *args)
{
while(true)
{
cout << "[new thread] pid: " << getpid() << endl;
//cout << (int*)args << endl;
sleep(1);
}
return nullptr;
}
int main()
{
pthread_t tid;
pthread_create(&tid, nullptr, threadRoutine, nullptr);
while(true)
{
printf("[main thread] pid:%d, new thread tid:%p\n", getpid(), tid);
sleep(1);
}
return 0;
}
2. 线程等待
#include <pthread.h>
int pthread_join(pthread_t thread, void **retval);
-
pthread_t thread:需要等待线程的tid -
void **retval:线程跑完退出的信息这里不考虑异常,因为线程一旦异常,全部的线程(包括主线程)就直接退出了
-
线程等待成功返回
0,创建失败返回错误码。 -
等待方式是阻塞等待
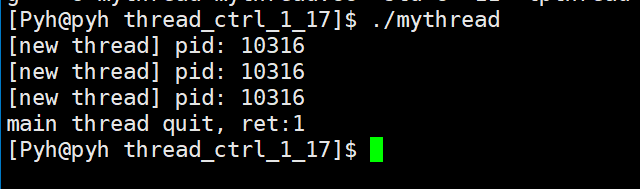
void *threadRoutine(void *args)
{
//新线程跑3秒后退出
int cnt = 3;
while(true)
{
cout << "[new thread] pid: " << getpid() << endl;
cnt--;
if(cnt == 0) break;
sleep(1);
}
return (void*)1;
}
int main()
{
pthread_t tid;
pthread_create(&tid, nullptr, threadRoutine, nullptr);
//线程等待 默认阻塞等待
void *retval;
pthread_join(tid, &retval);
cout << "main thread quit, ret:" << (long long int)retval<< endl; //64位指针8个字节,用长整型接收
return 0;
}
3. 线程终止
#include <pthread.h>
void pthread_exit(void *retval);
void *retval:和线程等待的第二个参数一样,返回线程的退出信息
exit():用来终止进程,如果线程要终止,采用pthread_exit。
4. 线程取消
#include <pthread.h>
int pthread_cancel(pthread_t thread);
pthread_t thread:需要取消线程的tid
5. 线程ID
我们创建一个线程,这个线程想要拿到自己线程的tid,采用phtread_self()
string toHex(pthread_t tid)
{
char hex[64];
snprintf(hex, sizeof(hex), "%p", tid);
return hex;
}
void *threadRoutine(void *args)
{
while(true)
{
cout << "thread id:" << toHex(pthread_self()) << endl;
sleep(1);
}
}
int main()
{
pthread_t tid;
pthread_create(&tid, nullptr, threadRoutine, (void*)"Thread 1");
cout << "[main thread] new thread id:" << toHex(tid) << endl;
pthread_join(tid, nullptr);
return 0;
}
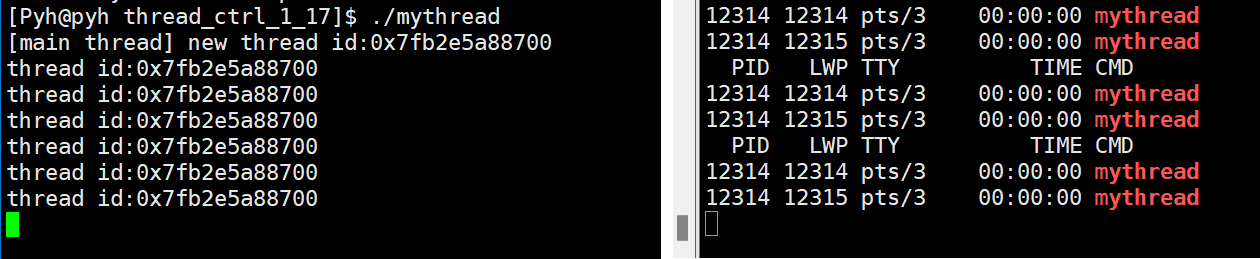
我们这里得到的新线程的id,和我们监控脚本看到的线程id并不一样,我们获取到的更类似于一个地址。
这是因为Linux中并没有明确线程的概念,只有轻量级进程的概念,这个LWP是给操作系统自己看的。
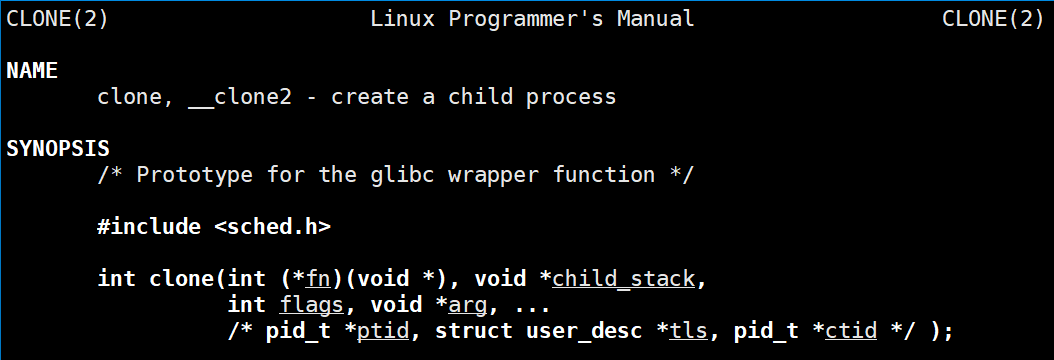
这就是操作系统创建轻量级进程的接口,参数很多,使用很麻烦,所以pthead线程库就对其进行了封装,于是就有了我们上面所使用的这批接口。意思就是说线程的概念,是库来进行维护的,而这个库是一个动态库,需要加载到内存当中,库又是在共享区。clone函数的第二个参数void *child_stack,就是自定义一个栈,这个“栈”,就是在共享区当中。
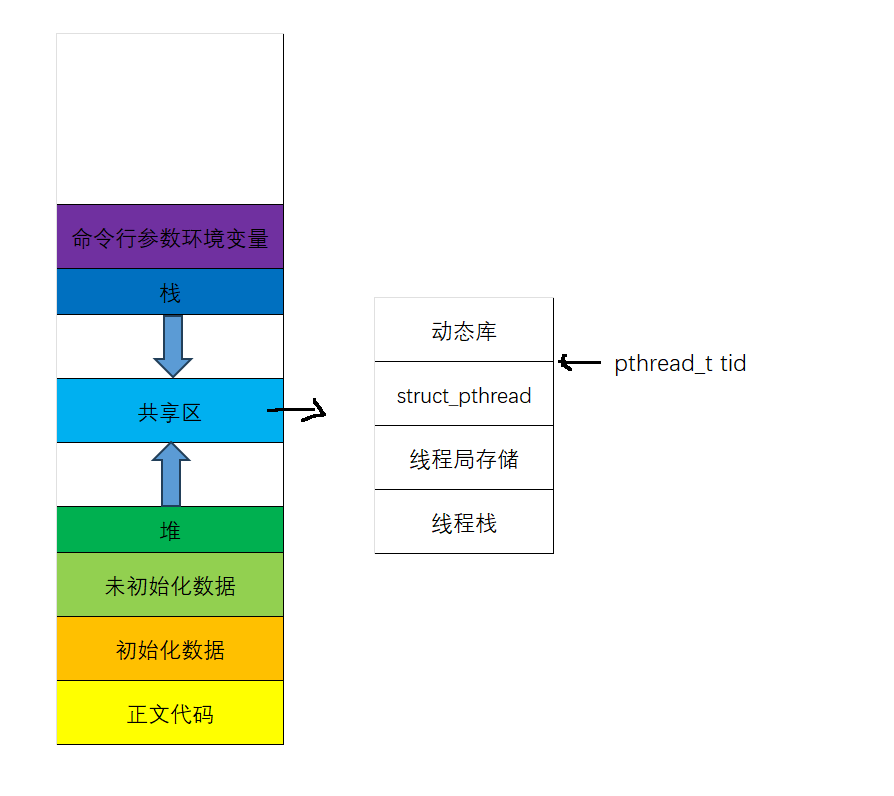
所以我们拿到的tid,其实就是它tcb的起始地址
线程栈:
每个线程都有自己的调用链,
main函数创建线程时可以调用一些函数,而这些线程内部也可以调用别的函数,所以他们必须要有自己独立的栈帧结构,这里面要存储执行流在执行过程中的临时变量。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 设计模式——单例模式
- 【算法Hot100系列】接雨水
- 如何通过蓝牙串口启动智能物联网?
- 揭秘淘宝APP商品原数据接口:引领电商数据革命,赋能开发者无限可能
- openGauss学习笔记-199 openGauss 数据库运维-常见故障定位案例-Lock wait timeout
- 代码随想录 718. 最长重复子数组
- DQL-条件查询
- Wpf 使用 Prism 实战开发Day11
- 第七部分 使用变量 (上)
- 【WinRAR技巧】如何使用WinRAR保护压缩包的文件不被修改?