运筹说 第96期 | 非线性规划基本概念
一、前言
1 发展历程
非线性规划是具有非线性约束条件或目标函数的数学规划,是运筹学的重要分支,是20世纪50年代才开始形成的一门新兴科学。

2 非线性规划与线性规划的区别
- 目标约束不同:线性规划的目标函数和约束条件都是其自变量的线性函数(一次式);非线性规划的目标函数和约束条件都是其自变量的非线性函数(含有非线性成分)。
- 最优解范围不同:如果最优解存在,线性规划只能存在可行域的边界上找到;非线性规划的最优解可能存在于可行域的任意一点。
3 经典方法
- 一维最优化方法:黄金分割法,切线法,插值法
- 无约束最优化方法:梯度法,牛顿法,共轭梯度法,拟牛顿法
- 约束最优化方法:制约函数法,可行方向法
二、基本概念
1 非线性规划的数学模型
一般形式
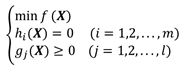
无等式形式
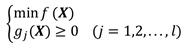
若存在等式,可用
![]()
代替
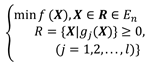
可行域形式
2 二维问题的图解
当只有两个自变量时,求解非线性规划也可像对线性规划那样求助于图解法。对于下述非线性规划问题,第一个约束为图中抛物线左边的部分,第二个约束为直线上侧部分,然后考虑到自变量的非负约束,得到模型的可行域。因此目标函数最终可转化为求解可行域内点到(2,1)的最短距离。


3 局部极小与全局极小
设𝑓(𝑿)为定义在𝑛维欧氏空间En的某一区域𝑅上的𝑛元实函数。
(1)局部极小
对于X*∈R,如果存在某个ε>0,使所有与X*的距离小于ε的X∈R,都有f(X)≥fX*,则称X*为fX
在R上的局部极小点,fX*为局部极小值。
若对于所有X≠X*且与X*的距离小于ε的X∈R,都有fX>fX*,则称X*为fX在R上的严格局部极小点,fX*为严格局部极小值。
(2)全局极小
如果存在X*∈R,对所有X∈R都有fX≥fX*,则称X*为fX在R上的全局最小点,fX*为全局最小值。
若对于所有X∈R且X≠X*,都有fX>fX*,则称X*为fX在R上的严格全局最小点,fX*为严格全局最小值。

4 多元函数极值点存在的条件
(1)必要条件
定理1:设R是n维欧氏空间En上的某一开集,f(X)在R上有连续一阶偏导数,且在点X*∈R
取得局部极值,则必有
![]()
或写成
![]()
此处
![]()
为函数f(X)在点X*处的梯度。
(2)二次型
二次型是X=x1,x2,…,xnT的二次齐次函数

其中,aij= aji,A为n×n对称矩阵。若A所有元素都是实数,则称为实二次型。
二次型的类型主要包括:正定、负定、不定、半正定、半负定。其中,实二次型XTAX正定的充要条件为A左上角各阶主子式都大于零,半正定各阶主子式大于等于零;实二次型XTAX负定的充要条件为A左上角各阶主子式负正相间,半负定各阶主子式“≤≥”相间。
(3)多元函数的泰勒公式
在X(0)处的泰勒展开式:
![]()
其中,
![]()
若以X=X0+P代入,则展开式变为:
![]()
其中,
![]()
也可写成含高阶无穷小形式:
![]()
其中,当X→X0时,ο(X-X(0)2)为X-X(0)2的高阶无穷小。
(4)充分条件
定理2:设R是n维欧式空间En上的某一开集,fX在R上有连续二阶偏导数,若?fX*=0,且?2fX*正定,则X*∈R为fX的严格局部极小点。此处,称纳布拉fX*的矩阵式为黑塞矩阵。

5 凸函数和凹函数
(1)定义
设fX为定义在n维欧氏空间En中某个凸集Rc上的函数,若对任何实数α0<α<1以及Rc中的任意两点X1和X(2),恒有
![]()
则称f(X)为定义在Rc上的凸函数。
若对任何实数α0<α<1以及Rc中的任意两点X1和X(2),恒有
![]()
则称f(X)为定义在Rc上的严格凸函数。
若两式中的不等号反向,即可得到凹函数和严格凹函数的定义。显然,若函数f(X)=-g(X)是凸函数(严格凸函数),则g(X)一定是凹函数(严格凹函数)。
【几何意义】
函数图形上的任意两点的连线都在这个图形的上方,就是向下凸的。凹函数则是向下凹的。

(2)性质
- 性质1:设f(X)为定义在凸集Rc上的凸函数,则对任意实数β≥0,函数βf(X)也是定义在Rc上的凸函数。
- 性质2:设f1(X)和f2(X)为定义在凸集Rc上的两个凸函数,则这两个凸函数的和fX=f1X+f2(X)仍为定义在Rc上的凸函数。
由以上两个性质可以推得:有限个凸函数的非负线性组合
![]()
仍为凸函数。
- 性质3:设f(X)为定义在凸集Rc上的凸函数,则对每一实数β,集合(称为水平集)
![]()
是凸集。
(3)凸函数的判定
【一阶条件】
设R为En上的开凸集,f(X在Rc上可微,则f(X)为Rc上的凸函数的充要条件是:对任意不同两点X(1)∈Rc和X(2)∈Rc,恒有
![]()
若上式为严格不等式,它就是严格凸函数的充要条件。如将上式中的不等号反向,就可得到凹函数(严格不等号时为严格凹函数)的充要条件。
【二阶条件】
设Rc为En上的开凸集,f(X)在Rc上二阶可微,则f(X)为Rc上的凸函数(凹函数)的充要条件是:对所有X∈R?,其黑塞矩阵半正定(半负定)。
若f(X)的黑塞矩阵对所有X∈R,都是正定(负定)的,则f(X)是Rc上的严格凸函数(严格凹函数)。
(4)凸函数的极值
现设fX是定义在凸集Rc上的可微凸函数,如果存在点X*∈Rc,都有
![]()
则X*就是fX在Rc上的最小点(全局最小点)。
6 凸规划
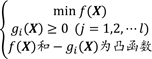
对于非线性规划式
![]()
若其中的f(X)为凸函数,giX(j=1,2,?l)全为凹函数,则此非线性规划为凸规划,即
凸规划具有以下性质:
- 可行解集为凸集。
- 最优解集为凸集(假定最优解存在)。
- 任何局部最优解也是其全局最优解。
- 若目标函数为严格凸函数,且最优解存在,则其最优解必唯一。
7 下降迭代算法
(1)基本思想
按照一定的规则(算法)逐步迭代寻找更优点,得到一个解点的序列X(k),若该点列有一极限点X*,即
![]()
则称该点列收敛于X*。
对于极小化问题而言,我们要求解的序列X(k),其对应的目标函数值fX(k)应是逐步减小的,即要求
![]()
具有这种性质的算法称为下降迭代算法
(2)一般迭代格式
- 选取某一初始点X(0),令k:=0。
- 确定搜索方向。当已得出某一迭代点X(k),且X(k)不是极小点。这时,就从X(k)出发确定一搜索方向P(k),要求沿着这个方向可以找到能使目标函数值下降的点。
- 确定步长。沿P(k)方向前进一个步长,得到新点X(k+1)。即在由X(k)出发的射线X=X(k)+λPk(λ≥0)上,通过确定步长(因子)λ=λk得下一个迭代点X(k+1)=X(k)+λkPk,使得fX(k+1)=fX(k)+λkPk<fX(k)
- 检验新得到的点是否为要求的极小点或近似极小点。如满足要求,迭代终止。否则令k:=k+1,返回第2步继续迭代。
(3)步长选定
在极小化问题中,步长的选定由使目标函数值沿搜索方向下降最多为依据的,即沿射线X(k)+λP(k)求f(x)的极小,即选取λk使
![]()
称此过程为一维搜索/线搜索,由此确定的步长为最佳步长。

定理3:设目标函数𝑓(𝑋)具有连续一阶偏导数,X(k+1)按下述规则产生:
![]()
则有
![]()
即搜索方向上所得最优点处的梯度和该搜索方向正交。这可以用来判断是否达到终止迭代的要求。
(4)常用的终止迭代准则
根据相继两次迭代结果的绝对误差:
![]()
根据相继两次迭代结果的相对误差:
根据函数梯度的模足够小:
![]()
其中,上述三式要求分母不等于和不接近于零,各式中的ε1、ε2、ε3、ε4和ε5为足够小的正数。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!