HMM算法(Hidden Markov Models)揭秘
序列数据
机器学习的数据通常有两类,最常见的是独立同分布数据,其次就是序列数据。对于前者,一般出现在各种分类/回归问题中,其最大似然估计是所有数据点的概率分布乘积。对于后者,一般出现在各种时间序列问题中,比如在特定时间特定区域内的降雨量数据、每天的货币汇率数据,以及上下文相关的,如语音识别中的声学特征数据、文本的字符序列数据、生物领域如DNA数据等。需要指出,本文介绍的HMM模型适用于一切序列问题,而不仅仅是时序问题。
序列数据的平稳和非平稳性
在平稳状况下,虽然数据随时间变化,但数据的分布(或来源)不变。而对于非平稳状况,情况更为复杂,生成数据的分布本身也在变化。这里我们讨论简单的平稳情况。
马尔科夫模型(Markov models)
与马尔科夫决策过程(MDP)类似,本文讨论的马尔科夫模型也满足马尔科夫性,即未来的预测只依赖于最近的观测,而与过去的历史无关。换言之,马尔科夫性是指不具备记忆特质。这是因为,如果考虑未来观测对所有过去观测的通用依赖,就会导致复杂性的无限增加。而为了预测未来,最近的观测总是比过去历史的观测更有信息量、更有价值。
对于通用的马尔科夫链(Markov chain),我们可以用以下联合概率表示:
 ? ? ? ? ? ? ? ? ? ?(公式1)
? ? ? ? ? ? ? ? ? ?(公式1)
其中表示观测序列,该式很好理解,即
现在考虑一阶马尔科夫链(?rst-order Markov chain),即满足未来的状态仅与当前状态相关,与任何历史的状态无关,用下图表示:
 (图1)
(图1)
此时上述公式变为:
 ? ? ? ?(公式2)
? ? ? ?(公式2)
直观表示为:
根据马尔科夫性(未来只依赖于最近,而与过去的历史无关)可知:
![]() ? ? ? ? ? ?(公式3)
? ? ? ? ? ?(公式3)
对于平稳序列数据,条件概率对于不同n是一样的,这样的模型叫做同质马尔科夫链。举个例子,如果这个条件概率依赖于某个可调节的参数(从训练数据中得到),那么该链的所有条件概率就能共享该参数。
现在考虑高阶马尔科夫链(higher-order Markov chain),即允许更早的观测对于此刻有影响,比如二阶马尔科夫链(second-order Markov chain)是允许预测值依赖于前两个观测。用下图表示:
 (图2)
(图2)
它的联合概率分布表示为:
 ? ?(公式4)
? ?(公式4)
高阶马尔科夫链相对于一阶马尔科夫链增加了灵活性,但也增加了参数量。事实上,M阶马尔科夫链的参数随M指数级增加,从而导致该方法不实用。
隐马尔科夫模型(Hidden?Markov models)
HMM在马尔科夫模型中引入隐变量(也叫潜在变量),已知有,现引入
,具体结构如下图所示:
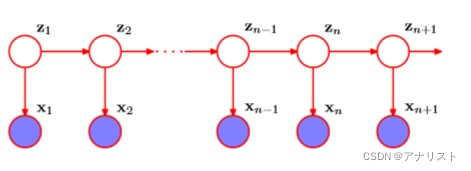 (图3)
(图3)
上图满足当给定时,
和
是条件独立的,即:
 ? ? ? ? ? ? ? ? ?(公式5)
? ? ? ? ? ? ? ? ?(公式5)
因此,HMM的联合概率分布可表示为:
 ? ? ?(公式6)
? ? ?(公式6)
观察可知,对于任意两个观测值和
,总存在一条经过隐变量的路径连接它们。因此,
的预测概率
不存在条件独立性,即
必定依赖于所有的
,换言之,观测变量X不满足任意阶的马尔科夫性。
假设每个隐变量有K个状态(或K个取值),则它可以表示为K维的向量,其中向量的值为1个元素为1,其余元素全为0. 我们对隐变量
定义一个条件概率
,那么该概率对于所有n的取值对应了一个矩阵,记为A。这个A就是转移矩阵,其中每个元素叫做转移概率。
我们把A的元素定义为
,它的含义是,在n-1时刻,z在j状态的取值为1,在n时刻,z在k状态的取值为1,事件发生的条件概率(可以看出,和n的取值无关,因为是平稳序列数据)。另外,由于
是概率,所以满足
,以及根据上文状态定义,有
。
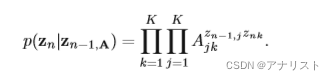
条件概率用显式的公式可表示为:
 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (公式7)
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (公式7)
该式含义是:在以A为转移矩阵的背景下,隐变量Z在n-1时刻(即)向n时刻(即
)转移的总概率是A矩阵(KxK)若干元素的乘积,具体是n-1时刻在状态j的元素(即
)转移到n时刻在状态k的元素(即
)。
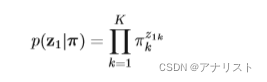
初始隐变量节点比较特殊,因为它没有父节点(没有节点指向它)。它的边际概率表示为:
 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(公式8)
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(公式8)
其中是概率
构成的向量,不难理解,
的含义是:在时刻1,隐变量Z处于k状态(即初始化状态是k)的概率。由于
的取值不是0就是1,因此
只有在状态取值为k(即
)时,才为
,而在其余状态(即
)都为1.? ?那么
就表示时刻1的隐变量的边际概率,它可通过对时刻1的所有K个状态累积得到。另外,根据定义有:
对于K=3的状态转移图可用下图表示:
 (图4)
(图4)
图中三个方形表示3个状态。黑色箭头曲线表示状态转移矩阵的元素。注意:这不是概率图模型(PGM,即?probabilistic graphical model),因为每个节点不是单独的变量,而是同一个变量的不同状态(在不同时刻取得)。因此这里的节点用方形而不是圆形表示。
把上图按照时间展开,就得到了一个包含隐变量的网格图,对于HMM就有如下形式:
 (图5)
(图5)
不难发现,每一列对应一个,每一行代表一个状态。
现在考虑条件概率,其中
是决定分布的一系列参数。这个由隐变量决定观测变量的条件概率叫做发射概率(即emission?probabilities),对于离散的x(包括HMM场景),一般由条件概率表(CPT,即conditional probability tables?)给出。另外,对于给定的
,由于
是长度为K的二元向量(元素非0即1),
同样对应一个包含K个元素的向量。
发射概率可具体表示如下:
 ? ? ? ? ? ? ? ? ? ? ? ? ?(公式9)
? ? ? ? ? ? ? ? ? ? ? ? ?(公式9)
一些讨论:对于同质模型,控制隐变量的所有条件概率共享转移矩阵A,类似的,发射概率
共享所有的
。另外需要注意到,基于独立同分布数据的混合模型(如GMM)对应本文的特例,其中
对于所有的j是一样的;因此这导致
独立于
。此时相当于把图3所有的横向箭头曲线去除得到的模型。
现在给出隐变量和观测变量的联合概率分布的具体形式,相当于对公式6的具体化:
 ? (公式10)
? (公式10)
其中{
},
{
},
{
,
,
}。从上式可看出对A和
共享的含义。
HMM的极大似然估计(EM算法)
当我们得到观测值{
},我们可以利用极大似然估计(MLE)来计算HMM的未知参数。HMM的X的边际概率可表示如下:
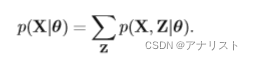 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(公式11)
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(公式11)
是对Z和X的联合概率
对隐变量Z的求和得到。由于联合概率
无法分解为n项因子的乘积,我们无法独立的对每个
进行求和。另外因为有N个变量需要求和,其中每个变量是K维向量(包含K个状态),因此总共有
项数值需要求和,是HMM链路长度N的指数级别,也就无法直接求和。(注意:公式11的求和对应了图5的网格图中指数量级的路径之和。)
这时候我们想到EM算法。EM算法需要对模型参数进行初始化,记为;E步骤中,我们利用
计算出隐变量的后验概率
;然后用该后验概率在M步骤中计算出
,具体公式如下:
 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(公式12)
? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(公式12)
(关于EM算法以及公式12的来源,见本人另一篇博客:
EM算法(expectation maximization algorithms)揭秘? )
现在给出一些函数符号,我们把隐变量的边际后验概率记为
,具体如下:
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(公式13)
把两个相邻的隐变量和
的联合后验概率记为
,具体如下:
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (公式14)
对于每个时刻n,由于是一个K维的二元向量(只有一个1,其余全是0),因此
是一个K维的非负且元素和为1的向量。类似的,
是一个KxK维的矩阵,且其元素也是非负且和为1.我们用
表示
的概率。
表示
且
的联合概率。由于二元随机变量(非0即1)的期望等于它取值为1的概率,因此有:
 ? ? ? ? ? ? ? ? ? ? ? ? (公式15)
? ? ? ? ? ? ? ? ? ? ? ? (公式15)
?? ? ? ?(公式16)
? ? ?(公式16)
现在将公式10的联合概率分布代入公式12,并且利用公式15和公式16中和
的定义,得到:
 (公式17)
(公式17)
验证提示:上式右边第一项需要用到的定义
,
的属性
,以及
的定义(即公式8);上式右边第二项需要用到
的定义
,以及
的定义(即公式7);上式右边第三项需要用到
的定义(即公式9)。
在E步骤中,我们计算和
的值,这就需要计算
也就是
的值,可以看到,和上文提到的EM算法的E步骤对应起来了。
在M步骤中,我们将{
}看成变量,同时将
和
看成常量,对
进行最大化。其中对于
和
变量比较简单,可分别用拉格朗日乘子法,得到结果(过程省略):
 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(公式18)
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(公式18)
 ? ? ? ? ? ? ? ? ? ? ?(公式19)
? ? ? ? ? ? ? ? ? ? ?(公式19)
EM算法要求对变量和
选取恰当的初始值,应当分别满足求和为1的约束和非负约束。另外注意到,
和
一旦被初始化为0,在EM迭代过程中会一直保持为0.
当把看成变量,对
进行最大化时,注意到公式17只有第三项有
,此时这一项的形式和高斯混合模型完全一致(见EM应用篇(GMM))。本文的
同样起到某种“责任”的作用,或说负责解释的比例。现在考虑观测概率
的具体形式,它可以是高斯概率分布,离散多项式概率分布,或伯努利概率分布等。(在李航《统计学习方法》第10章,介绍HMM时,只给出了观测概率矩阵B,并未讨论产生它的概率分布。是否这个讨论是必要的?)
对于高斯概率分布,假设符合以下形式,即
具体对应了两个参数:高斯的均值
和协方差
。那么此时对
最大化,我们得到最优解(过程省略):
 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(公式20)
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(公式20)
?? ? ? ? ? ? ? ? ? ? ? ? ? (公式21)
? ? ? ? ? ? ? ? ? ? ? ? (公式21)
对于离散多项式概率分布,观测概率符合以下形式:
 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (公式22)
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (公式22)
注意,它只有一个参数。同样在M步骤中对
最大化,得到最优解(过程省略):
 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (公式23)
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (公式23)
思考:对于伯努利概率分布,情况如何?
EM算法的初始值很重要,这里有个技巧,首先把HMM的时序数据看成独立同分布数据,并用MLE对观测概率分布进行拟合。然后用最终结果来初始化EM算法。
前向与后向算法
下面解决上述EM算法中E步骤的和
的高效计算问题。前向与后向算法(forward-backward algorithm (Rabiner, 1989))就是为了解决这个问题。不过这里有争议:有学者认为前向与后向算法就是Baum-Welch算法(Baum-Welch algorithm (Baum, 1972)),或至少是接近的,或存在包含关系,代表人物是《PRML》的作者。但也有学者认为,前向与后向算法和Baum-Welch算法(属于EM算法)是并列关系,是相互独立的,分别解决HMM的第一个问题(即概率计算问题)和第二个问题(即参数学习问题),代表人物是《统计学习方法》的作者。而维基百科的观点是:Baum-Welch 算法是EM算法的一个特例,用于查找隐马尔可夫模型(HMM) 的未知参数,它利用前向-后向算法来计算期望步骤(即E步骤)的统计数据。言归正传,前向与后向算法有多个变体,其中最通用的算法叫做alpha-beta算法。
接下来的讨论将忽略对模型参数的显式依赖,因为它始终是固定的值。以下条件独立性来自论文(Jordan, 2007):

其中{
}。这些公式不难证明,有的能直接观察出来,下面依次验证。
公式24:相当于把从n时刻处截断,由两部分的条件独立性得证。
公式25:由于隐变量能决定观测变量
,因此
作为冗余条件可消去,得证。
公式26:由于隐变量能决定隐变量
,因此
作为冗余条件可消去,得证。
公式27:和公式26不同,这里要决定n+1到N时刻的值,保留即可。
公式28:与公式25类似。
公式29:把从n处分割成三段,结合HMM的图结构,应用贝叶斯公式可得。
公式30:只由
决定,与
无关,得证。
公式31:只由
决定,与
无关,得证。
现在考虑的计算问题。我们从
的后验概率
入手(见公式13),其中
是K维二元向量,其每个元素记为
。利用贝叶斯公式,我们得到:
![]() ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(公式32)
? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(公式32)
与公式13不同,这里省略了的记号。事实上
由
隐式决定,它表示一个似然估计。现在基于公式24的条件独立性,可将
进一步改写得到:
![]() ? ? ? ? ?(公式33)
? ? ? ? ?(公式33)
其中和
的定义分别为:
 ? ? ? ? ? ??
? ? ? ? ? ??
表示
和直到n时刻的观测数据的联合概率;
表示所有n+1到N时刻的未来数据相对于
的条件概率。与
一样,
和
也是K维向量,
的每个元素用
表示,此时表示
。
同理。
接下来推导的迭代关系,下面的推导用到公式25和公式26的条件独立性,
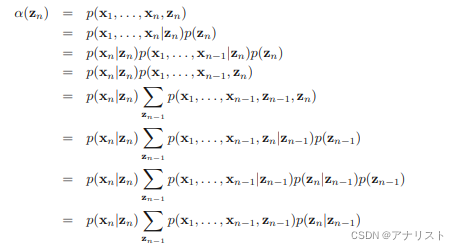
上式最后一步就是
,因此我们得到:
![]() ? ? ? ? ? ? ? ?(公式36)
? ? ? ? ? ? ? ?(公式36)
上式迭代(即前向算法)的时间复杂度为
,它的网格图如下:
 (图6)
(图6)
上图表明是由各个
加权求和得到,权重是各个
,而
就对应不同状态到达状态k=1的
,加权求和结果要乘以
才表示最终的
。
的迭代初始值
由以下公式给出:
 ? ? ? ? ? (公式37)
? ? ? ? ? (公式37)
这表明每个以
形式给出,其中k=1,...,K。这样就能顺着隐变量链得到每个
的
函数值,即
。整个链路有N个时刻,因此总时间复杂度为
。
类似的,可以推导的迭代关系,下面的推导用到公式27和公式28的条件独立性,
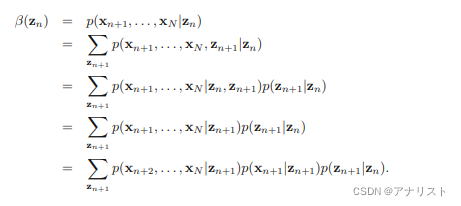
上式最后一步就是
,因此我们得到:
 ? ? ? ? ? ? ?(公式38)
? ? ? ? ? ? ?(公式38)
上式利用
迭代计算(即后向算法),同时基于发射概率
以及转移概率
,它的网格图如下:
 (图7)
(图7)
上图对应公式中的
,表示从n时刻的状态k=1转移到n+1时刻的状态k的转移概率。
为了解决的迭代初始化,首先对公式33取n=N,并将公式34代入,可得:
![]() ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(公式39)
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(公式39)
其中{
};而
,见公式13,省略了
。此时发现,只要规定:对于任意的
,满足
,就能让公式39恒成立(根据贝叶斯公式)。
解决完的计算问题后,高斯概率分布的M步骤中的
(即公式20)就有了新的形式:
 ? ? ? ? ? ?(公式40)
? ? ? ? ? ?(公式40)
在EM优化过程中,对似然概率的监控很有必要,现在让公式33两边对
求和,那么左边就变为1,即
,那么调整可得:
![]() ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(公式41)
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(公式41)
当我们取,即假设
是所有元素为1构成的向量。那么
可简化为:
![]() ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(公式42)
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(公式42)
此时不需要的迭代,只需要
函数。现在重新理解
,原先有
,公式42相当于把
计算量从指数级别降低到线性。
接下来解决的计算问题,它的定义来自公式14,即
,结合贝叶斯定理,可得:

??![]() ? ?(公式43)
? ?(公式43)
上式比较简单,其中倒数第2行的第一项和第五项相乘等于,第三项等于
。因此我们同样能够利用
和
的迭代,对
进行计算。
HMM预测下一个数据
HMM一个有趣且重要的应用是预测下一个x数据。比如已知观察值{
},要求预测
,这个在实时应用比如金融预测中很重要。我们利用公式29和公式31的条件独立性,结合简单的概率乘法和加法,可得:
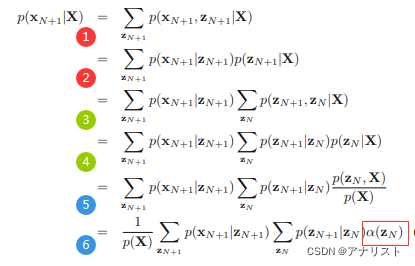 (公式44)
(公式44)
第1步将的边际概率扩展为和
的联合概率,需要对
求和消去
;
第2步利用贝叶斯公式,将联合概率分解为两项;
第3步将第2步的边际概率扩展为和
的联合概率;
第4步将第3步的联合概率分解为两项;
第5步利用贝叶斯公式,将改写为
;
第6步将常量提取到求和外面,同时套用公式34将
替换成
因此可通过先前向迭代计算
,再分别对
和
求和得到。需要指出,对
的求和结果可暂时保存,等到处理
时被再次利用。计算
等以此类推。
维特比算法(Viterbi algorithm)
HMM的许多应用中,隐变量具有重要的含义,因此有必要找到已知观测序列对应的最有可能的隐状态序列。例如在语音识别中,需要找到给定声音对应的最有可能的文本序列。由于HMM是一个有向图,该问题可以用最大-求和算法(max-sum algorithm或max-product algorithm)精确处理。(说明:最大-求和算法依赖sum-product algorithm,后者将联合概率表达为因子图(factor graph);最大-求和算法是图模型上的一个DP算法,它用于找到具有最大概率的变量集合。由于篇幅限制,本文不详细介绍这两个算法。)
需要指出,隐变量(或隐状态)的最有可能的序列并不等价于它们单独都是最有可能的。后一个问题可以通过首先运行前向-后向算法来找到每个隐变量的边际概率,然后单独最大化它得到。但是这样找到的隐状态通常并不是最有可能的状态序列。甚至最差情况,这样找到的状态序列可能具有零概率,即完全不存在,尽管它们单独都是最有可能的,这是因为在转移矩阵中,连接它们的矩阵元素为0。
和最大-求和算法类似,维特比算法也是DP算法,二者时间复杂度接近,都能将指数级别的解码问题转化为线性代价。首先,我们定义函数表示到n时刻所有路径中的概率最大值(取对数)为:
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (公式45)
式中把看成自由变量,对每个
变量(K维向量)的状态进行选择,选择使得X和Z的联合概率的对数最大化的(即最有可能的序列),直到到达
。注意:为了简化公式,省略了模型参数
;事实上,在寻找最有可能序列过程中,参数
是固定的。
根据HMM的定义(公式6),结合公式45,不难发现的迭代形式:
? ?(公式46)
其中初始值由公式45可得:
? ? ??(公式47)
一旦完成直到的最大化,我们将得到最优路径对应的联合概率
的ln值。为了找到隐状态的最优序列,我们可以使用一种回溯法(也叫倒推法,back-tracking)。我们把从
到
的K个可能状态的概率最大的状态序号保存到
函数中,其中
。一旦消息传递到HMM的末端,并且找到了概率最大的
状态,就可以利用该函数进行迭代回溯:
? ? ? ? ? ? ? ? ? ? ? ? ? ? ??(公式48)
直到推出n=1时刻的最大概率状态序号,我们就得到了最优路径:
? ? ?
参考资料?
《模式识别与机器学习》,2006 年。
《统计学习方法》,2012年。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- java httpclient Post
- C++ //例13.14 将一批数据以二进制形式存放在磁盘文件中。例13.15 将刚才以二进制形式存放在磁盘文件中的数据读入内存并在显示器上显示。
- 黑客自学(笔记)- 网安入门
- Redis应用(三)实现自动补全
- 搭建feign远程调用环境
- python入门,数据容器:字典dict
- TypeScript中的Declare关键字的作用
- Linux|shell编程|实验总结|期末考查试题
- linux远程连接finalshell始终失败解决方法
- Java多线程知识汇总(二)